




 廣告
廣告





















































自動駕駛中的橫向控制問題案例分析詳解
2020-11-18 23:13:03· 來源:焉知自動駕駛 作者:Aimee

前文提到了關(guān)于自動駕駛系統(tǒng)(Automotive Driving System,ADS)與轉(zhuǎn)向執(zhí)行單元EPS的交互控制邏輯,其中,對前端如何進行橫向預瞄及轉(zhuǎn)向控制,對于EPS執(zhí)行單元如
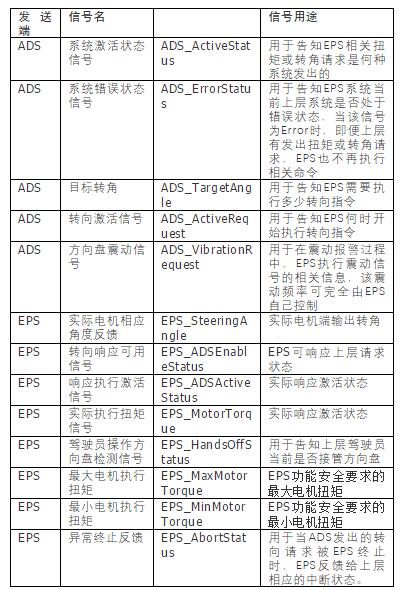
前文提到了關(guān)于自動駕駛系統(tǒng)(Automotive Driving System,ADS)與轉(zhuǎn)向執(zhí)行單元EPS的交互控制邏輯,其中,對前端如何進行橫向預瞄及轉(zhuǎn)向控制,對于EPS執(zhí)行單元如何進行回環(huán)PID控制進行了詳細的闡述,同時對于EPS執(zhí)行過程中的零位漂移進行了詳細的分析解讀。對于整個執(zhí)行過程而言,具有相對穩(wěn)定的評價標準,包括系統(tǒng)響應度與系統(tǒng)響應精度。前者更多的是功能層面,后者更多的是性能層面。對于自動駕駛系統(tǒng)與EPS從功能及架構(gòu)設(shè)計層面主要表示如下所示,對于基礎(chǔ)的轉(zhuǎn)向角度控制而言,其中發(fā)送端發(fā)送信息包含如下:
正常的控制邏輯圖如下:

實際橫向控制過程中容易出現(xiàn)各類不同的控制性能無法滿足需求的情況,對于自動駕駛而言,需要結(jié)合實際工況給出相應的解決方案,本文將列舉實例對該類問題進行分析和解決方案說明。
自動駕駛橫向響應過慢
如下圖表示了EPS響應方向盤轉(zhuǎn)向輸入的過程,EPS分別接收來自外部(ADS)轉(zhuǎn)向角度輸入,并與內(nèi)部轉(zhuǎn)向扭矩進行疊加,通過轉(zhuǎn)向助力及相關(guān)補償函數(shù)計算,可以生成輸出至執(zhí)行端的電機扭矩。

其中包含了如下幾個步驟:
1)首先接
收ADS發(fā)出轉(zhuǎn)角,通過如下公式進行轉(zhuǎn)角扭矩轉(zhuǎn)化生成需要執(zhí)行的扭矩請求;

其中△θ為由輸入轉(zhuǎn)角在大小齒輪上產(chǎn)生的轉(zhuǎn)向角度差,n為齒輪傳動比,GJp表示軸體抗扭剛度,L為轉(zhuǎn)向力臂長度。
對于計算生成的力矩采用EPS自身的基礎(chǔ)助力曲線進行助力后,生成電機執(zhí)行端扭矩,由于EPS存在響應死區(qū),因此,很多情況下,需要在響應結(jié)果前進行死區(qū)補償,即對于ADS發(fā)出的轉(zhuǎn)角或扭矩請求通過該曲線進行基礎(chǔ)助力后再進行實際響應,如下圖表示了基礎(chǔ)助力曲線相關(guān)示意圖。

為了更好的描述EPS在自動駕駛中的實際工作過程及響應性能,如下列舉了相關(guān)的實際案例對EPS橫向響應進行說明。
自動駕駛橫向控制超調(diào)
案例描述:
1)自動換道在避險回退過程中,常常出現(xiàn)回退過度甚至偏出本車道導致不安全,繼而系統(tǒng)又通過較大的回調(diào)力矩將車輛拉回車道中央;
2)自動駕駛車輛經(jīng)過一定道路區(qū)間時,出現(xiàn)行駛路徑蛇形走位,車輛出現(xiàn)相對穩(wěn)定的震蕩前進;
原因分析:
系統(tǒng)在回退控制過程中或在對中調(diào)整位置過程中,需要發(fā)送反向轉(zhuǎn)角給EPS進行橫向控制。如前文所述,EPS的轉(zhuǎn)角控制采用了多層嵌套式PID控制,其中P值主要決定了實際達到期望值的快慢,該值增大會控制車輛沿著參考線方向運動具有更快的傾向性,而微分D則是對該傾向性的快慢產(chǎn)生適當?shù)淖枇?,使得轉(zhuǎn)向更加平滑。本案例原因分析是當比例系數(shù)P值設(shè)置過大D值設(shè)置過小,系統(tǒng)出現(xiàn)欠阻尼,使執(zhí)行轉(zhuǎn)角控制超調(diào)量增大,后續(xù)通過誤差項反饋調(diào)節(jié)后,再次控制車輛回調(diào)至車道中央,出現(xiàn)震蕩前進。

解決方案:
持續(xù)減小系數(shù)P值適當增大D值,促使系統(tǒng)從欠阻尼模式至過阻尼模式逐漸改善,評價系統(tǒng)不會出現(xiàn)較大的超調(diào)時,判定參數(shù)滿足要求。
自動駕駛橫向接管性能
人機模式切換控制中主要進行方向盤平滑處理,當進入智能駕駛瞬間方向盤突然轉(zhuǎn)動而可能出現(xiàn)手力對抗現(xiàn)象時,對于該瞬時方向盤轉(zhuǎn)動力的平滑處理可以保持車輛更好的穩(wěn)定性。
案例描述:
1)自動駕駛系統(tǒng)轉(zhuǎn)向控制過程中,駕駛員通過手力掌握方向盤進行接管控制時,感覺接管方向盤手感發(fā)硬,且出現(xiàn)較大的對抗力矩。尤其是低速控制情況下容易出現(xiàn)方向盤鎖死。
2)自動駕駛對中或駕駛員控制換道過程中,駕駛員緩慢施加手力矩進行方向盤控制時,容易出現(xiàn)系統(tǒng)搶奪方向盤。
原因分析:
在一般力矩橫向控制過程中,允許駕駛員施加一定力矩在系統(tǒng)之上,系統(tǒng)可以通過前饋控制檢測到該駕駛員力矩后,在一定允許超調(diào)范圍內(nèi)適當減少發(fā)出扭矩實現(xiàn)較為精準的橫向控制。而在轉(zhuǎn)角控制邏輯中,系統(tǒng)都是發(fā)送目標轉(zhuǎn)角進行控制,且要求執(zhí)行機構(gòu)在響應該轉(zhuǎn)角過程中執(zhí)行到該目標轉(zhuǎn)角一定精度范圍內(nèi),且角度控制過程中不允許接管,超過閾值手力矩直接退出。
如下圖表示了轉(zhuǎn)向控制中手力矩大小對轉(zhuǎn)向的實際控制過程,從圖中可看出,當手力矩大于最小接管手力矩1.5Nm并持續(xù)一定時間T1時,系統(tǒng)判定為駕駛員接管該系統(tǒng)控制,此后實現(xiàn)人機共駕,當駕駛員力矩持續(xù)增高至2.5Nm并持續(xù)一定時間T2時,系統(tǒng)判定駕駛員橫向超越該系統(tǒng),此時系統(tǒng)退出至中斷待機狀態(tài),從功能安全考慮,當駕駛員手力矩超過EPS允許的最大安全手力矩后,系統(tǒng)直接退出。

解決方案:
對于角度控制邏輯采用手力矩閾值標定方式,即在不同的駕駛速度下標定不同的手力矩超越閾值,當手力矩大于該閾值且持續(xù)一定時間則退出橫向控制。這里需要解決的是在同樣時間下駕駛員施加的手力矩可以最快的被EPS響應到位,有兩個可用的方案進行接管性能提升:其一,是針對高低速對上述時間閾值T1和T2采用不同的閾值進行控制,一般的設(shè)置低速為較小延遲時間T1=300ms,設(shè)置高速為較大延遲時間閾值T2=500ms,此時可以達到比較精準的接管控制。
其二,由前文分析可知,EPS電機執(zhí)行扭矩實際是由如下公式直接決定的。
EPS電機扭矩 ∝ EPS電流 ∝ P * e(t)
如上公式,當偏差一致時,P越大,則相同時間內(nèi)電機電流越大,執(zhí)行扭矩越快,因此,適當?shù)恼{(diào)高P值可以很好的適配由于轉(zhuǎn)角控制帶來的駕駛員扭矩響應較慢的問題,更高效的實現(xiàn)駕駛員接管控制。
自動駕駛系統(tǒng)退出性能
案例描述:
1)自動換道無法正常繼續(xù)進行激活控制時,自動退出橫向控制,EPS扭矩響應快速自動下降為0,主觀感知橫向扭矩下降太快,導致高速狀態(tài)下方向失控。
2)自動駕駛車輛在駕駛員踩下制動踏板后,自動退出激活控制,EPS扭矩響應快速下降為0,主觀感知橫向扭矩下降太快,出現(xiàn)方向盤回振。
原因分析:
針對轉(zhuǎn)角的橫向控制,EPS響應過程是需要先通過轉(zhuǎn)角-扭矩換算算法將相關(guān)轉(zhuǎn)角計算為扭矩控制電機電流進行響應.當自動駕駛功能退出時,其發(fā)送的轉(zhuǎn)角瞬間將為0,該過程類似階躍響應方式。對于轉(zhuǎn)角下降為0時,EPS接收的實際輸入量也變?yōu)?,EPS輸出的扭矩隨即變?yōu)?,故電機執(zhí)行端會按照該扭矩下掉的速度進行響應。
解決方案:
為了解決自動駕駛控制過程中轉(zhuǎn)角快速降低導致的扭矩快速衰退,則需要在發(fā)送轉(zhuǎn)角進行轉(zhuǎn)向控制的過程中同時發(fā)送扭矩進行響應效果控制,當存在轉(zhuǎn)角控制時,EPS系統(tǒng)參照發(fā)送轉(zhuǎn)角計算相應的扭矩進行執(zhí)行控制,當轉(zhuǎn)角消失時,ADS系統(tǒng)對EPS發(fā)出換退請求及相應的緩退扭矩,該扭矩帶有一定的斜率,EPS參照該扭矩進行實際跟隨響應。考慮到EPS響應的功能安全及響應執(zhí)行不出現(xiàn)超調(diào)或毛刺,ADS可以同時發(fā)送最大最小扭矩限值,EPS執(zhí)行響應參照該限制進行,如下表表示新增的兩個發(fā)出扭矩限值。
ADS
最大轉(zhuǎn)向扭矩限制
ADS_MaxTorque
用于告知EPS執(zhí)行轉(zhuǎn)向指令過程中最大的扭矩執(zhí)行值
ADS
最小轉(zhuǎn)向扭矩限制
ADS_MinToque
用于告知EPS執(zhí)行轉(zhuǎn)向指令過程中最小的扭矩執(zhí)行值

如下圖所示,轉(zhuǎn)角不為零時,扭矩響應處于被控階段,則ADS發(fā)送最大最小扭矩控制邊帶,EPS執(zhí)行扭矩需要參照該控制邊帶進行濾波,去除超調(diào)及毛刺。當轉(zhuǎn)角降為0時,ADS發(fā)送最大最小扭矩保持相等,EPS參照其中之一進行扭矩跟隨,確保扭矩下掉參照一定斜率進行。

此外,從功能安全角度上講,EPS需要設(shè)置一個最大最小扭矩限值,當ADS發(fā)送轉(zhuǎn)角計算出的扭矩超過該限值,則EPS進行限值截斷,確保執(zhí)行結(jié)果安全。
實際控制過程中,為了防止由于方向盤來回擺動造成的影響,設(shè)計方向盤轉(zhuǎn)角死區(qū)處理。
總結(jié)
對于開發(fā)而言,更多的希望是能夠更好的從掌握系統(tǒng)工作原理上進行問題預防,在純粹自動駕駛控制的橫向過程中,更多的是利用回環(huán)PID調(diào)節(jié)控制+預測模型控制MPC雙向進行,本文詳細描述了轉(zhuǎn)向執(zhí)行機構(gòu)EPS對自動駕駛系統(tǒng)的橫向響應過程,并結(jié)合實例進行分析了相關(guān)的問題解決方案,后續(xù),將通過不間斷的問題補充完善整個自動駕駛開發(fā)過程。



 廣告
廣告 編輯推薦




最新資訊
-
標準立項|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評價開始從“電池單體性能指標”轉(zhuǎn)
2026-03-04 11:38
-
把脈消費趨勢,賦能產(chǎn)業(yè)升級:商務部副部長
2026-03-04 11:02
