




 廣告
廣告





















































一文讀懂自動駕駛數據閉環(huán)
2021-09-21 18:17:01· 來源:智駕最前沿

4)規(guī)劃:規(guī)劃問題可以是傳統(tǒng)的規(guī)則方法,也可以是強化學習或者模仿學習,其中強化學習也需要數據學習懲罰/獎勵和策略。目前人們關心規(guī)劃的地域化和個性化問題,這個比起感知的類似問題解決起來更加困難,比如激進還是保守地進行換道超車和并道匯入。最近有討論合并預測和規(guī)劃的解決方法,甚至包括地圖定位一起建模,這個沒有數據的“喂養(yǎng)”是很難成立的。
“DSDNet: Deep Structured self-Driving Network”
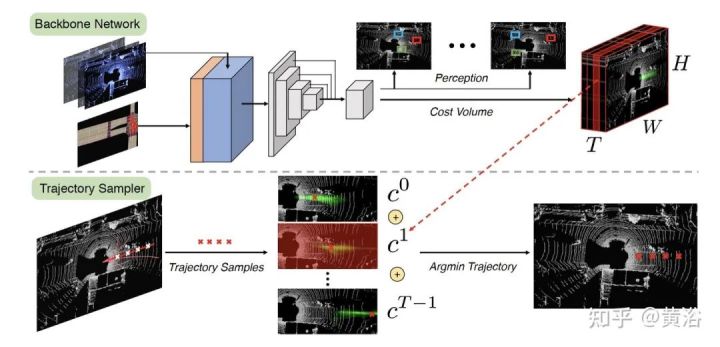
“End-to-end Interpretable Neural Motion Planner”
“MP3: A Unified Model to Map, Perceive,Predict and Plan”

“Probabilistic Anchor Trajectory Hypotheses For Behavior Prediction”
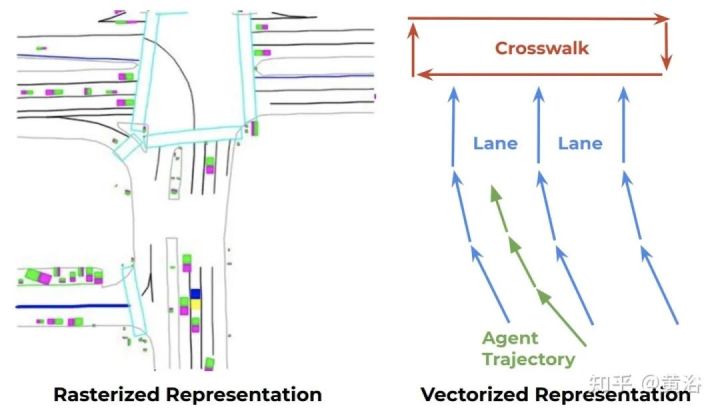
“VectorNet: Encoding HD Maps and Agent Dynamics From Vectorized Representation”
“Deep Imitation Learning for AV in Generic Urban Scenarios with Enhanced Safety”
“Perceive, Predict, and Plan: Safe Motion Planning Through Interpretable Semantic Rep”
5)控制:應該說,控制的傳統(tǒng)方法相對成熟,不過并不是說數據驅動就沒有價值,實際上規(guī)劃和控制的確集成在一起建模也是大家感興趣的領域,前面提到的強化學習和模仿學習同樣是不錯的解決手段。
“A Fast Integrated Planning and Control framework for AV via Imitation Learning”
“Deep Imitative Models For Flexible Inference, Planning, And Control”



 廣告
廣告 編輯推薦




最新資訊
-
聯合國法規(guī)R60對兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標準立項|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評價開始從“電池單體性能指標”轉
2026-03-04 11:38
