




 廣告
廣告





















































同軸直聯(lián)電驅(qū)橋傳動(dòng)系統(tǒng)動(dòng)態(tài)特性研究
2020-04-13 22:35:22· 來源:EDC電驅(qū)未來

1 引言以純電驅(qū)動(dòng)汽車同軸直聯(lián)行星輪系為研究對(duì)象,應(yīng)用集中參數(shù)理論建立了系統(tǒng)的動(dòng)力學(xué)模型,對(duì)不同輸入轉(zhuǎn)數(shù)下系統(tǒng)的動(dòng)態(tài)響應(yīng)進(jìn)行計(jì)算及分析,以得到整個(gè)傳動(dòng)系
1 引言
以純電驅(qū)動(dòng)汽車同軸直聯(lián)行星輪系為研究對(duì)象,應(yīng)用集中參數(shù)理論建立了系統(tǒng)的動(dòng)力學(xué)模型,對(duì)不同輸入轉(zhuǎn)數(shù)下系統(tǒng)的動(dòng)態(tài)響應(yīng)進(jìn)行計(jì)算及分析,以得到整個(gè)傳動(dòng)系統(tǒng)的動(dòng)態(tài)特性。
2 傳動(dòng)系統(tǒng)動(dòng)力學(xué)模型建立
本研究采用同軸直聯(lián)純電驅(qū)動(dòng)車橋?yàn)檠芯繉?duì)象,動(dòng)力學(xué)模型,如圖1所示。純電驅(qū)動(dòng)車橋采用行星減速機(jī)構(gòu),驅(qū)動(dòng)電機(jī)殼體與車橋殼體共用,驅(qū)動(dòng)電機(jī)軸與行星減速機(jī)構(gòu)太陽(yáng)輪一體化設(shè)計(jì),從而實(shí)現(xiàn)輸入與輸出的同軸直聯(lián)與深度集成。這種設(shè)計(jì)能夠有效地解決電動(dòng)汽車偏載、重量重、體積大與能耗高等問題,并改善行駛平順性。
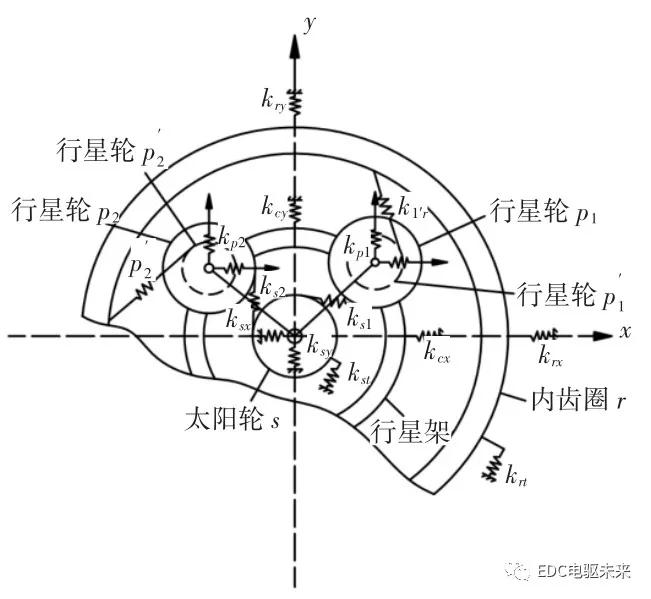
圖1 行星輪系動(dòng)力學(xué)模型
Fig.1 Dynamic Model of the Planetary Gear Set
圖中:ksx,kcx,krx—太陽(yáng)輪、行星架與內(nèi)齒圈的 x 向剛度;ksy,kcy,kry—太陽(yáng)輪、行星架、內(nèi)齒圈的 y向剛度;kst,krt—太陽(yáng)輪與內(nèi)齒圈的切向剛度;kp1,kp2—兩行星輪徑向剛度;ks1,ks2—太陽(yáng)輪與兩行星輪的嚙合剛度;k1’r,k2’r—兩行星輪與內(nèi)齒圈的嚙合剛度。設(shè)行星輪個(gè)數(shù)為N,則太陽(yáng)輪與行星輪n(n=1,2,3,…,N)嚙合部位的局部放大圖,如圖 2 所示。

圖2 嚙合部位局部放大圖
Fig.2 Partial Enlarged Drawing of the Meshing Position
圖中:φn—行星輪n中心和太陽(yáng)輪中心連線與x軸正向的夾角;αsn—太陽(yáng)輪與行星輪n的嚙合角;ωs與ωn—太陽(yáng)輪與行星輪n的轉(zhuǎn)數(shù);rs與rn—太陽(yáng)輪與行星輪n的基圓半徑;xs與xn—太陽(yáng)輪與行星輪n在x方向上的位移;ys與yn—太陽(yáng)輪與行星輪n在y方向上的位移。設(shè)定ksn受壓為正方向,則太陽(yáng)輪與行星輪n之間相對(duì)位移在嚙合線上投影為:

同理,行星輪n’與內(nèi)齒圈相對(duì)位移沿嚙合線投影為:

式中:xn′與 xr—行星輪 n′與內(nèi)齒圈的 x 方向位移;αn′r—行星輪 n′與內(nèi)齒圈的嚙合角;yn′與yr—行星輪n′與內(nèi)齒圈的y方向位移;ωn′與 rn′—行星輪 n′的轉(zhuǎn)數(shù)與基圓半徑;ωr與 rr—內(nèi)齒圈的轉(zhuǎn)數(shù)與基圓半徑。
行星輪n與行星架間相對(duì)位移在xn,yn坐標(biāo)軸及行星架扭轉(zhuǎn)方向上投影為:

式中:xc,yc—行星架 x,y方向位移;ωc—行星架轉(zhuǎn)數(shù);rc—行星輪與太陽(yáng)輪中心距。
3 系統(tǒng)運(yùn)動(dòng)方程建立
設(shè)輸入轉(zhuǎn)矩為Ts,輸出轉(zhuǎn)矩為Tc。忽略系統(tǒng)元件與結(jié)構(gòu)件之間摩擦帶來的影響,建立系統(tǒng)運(yùn)動(dòng)微分方程為:

式中:ms—太陽(yáng)輪質(zhì)量;csx—太陽(yáng)輪x向阻尼;csy—太陽(yáng)輪y向阻尼;csn—太陽(yáng)輪與行星輪n之間嚙合阻尼;Js—太陽(yáng)輪轉(zhuǎn)動(dòng)慣量;θs—太陽(yáng)輪轉(zhuǎn)角;以順時(shí)針為正方向;cst—太陽(yáng)輪切向阻尼。mn與 mn′—行星輪 n 與 n′的質(zhì)量;cn′r—行星輪 n 與內(nèi)齒圈之間嚙合阻尼;cpn—行星輪n徑向阻尼;Jn與Jn′—行星輪n與n′的轉(zhuǎn)動(dòng)慣量;θn—行星輪n的轉(zhuǎn)角。mc—行星架質(zhì)量;ccx—行星架的x向阻尼;ccy—行星架的y向阻尼;Jc—行星架轉(zhuǎn)動(dòng)慣量;θc—行星架轉(zhuǎn)角。mr—內(nèi)齒圈質(zhì)量;crx—內(nèi)齒圈x向阻尼;cry—內(nèi)齒圈y向阻尼;Jr—內(nèi)齒圈轉(zhuǎn)動(dòng)慣量;θr—內(nèi)齒圈轉(zhuǎn)角;crt—內(nèi)齒圈切向阻尼。
4 系統(tǒng)動(dòng)態(tài)特性計(jì)算
將式(4)-式(7)統(tǒng)籌整理成矩陣形式:MX¨+CX˙+KX-T=0(8)式中:M—系統(tǒng)質(zhì)量矩陣;C—阻尼矩陣;K—剛度矩陣;T—轉(zhuǎn)矩矩
陣。應(yīng)用Runge-Kutta方法對(duì)方程組進(jìn)行求解,并定義系統(tǒng)

式中:xi peak—構(gòu)件i振動(dòng)位移峰值;ximax—構(gòu)件i在當(dāng)前轉(zhuǎn)數(shù)下振動(dòng)位移最大值;xi min—構(gòu)件i在當(dāng)前轉(zhuǎn)數(shù)下振動(dòng)位移最小值。各構(gòu)件在不同轉(zhuǎn)數(shù)下的徑向振動(dòng)位移峰值計(jì)算結(jié)果,如圖4所示。

圖3 各構(gòu)件徑向振動(dòng)位移峰值
Fig.3 Radial Displacement Peak Value of the Components
圖3中,點(diǎn)劃線所示為行星架徑向位移隨轉(zhuǎn)數(shù)變化趨勢(shì),虛線所示為太陽(yáng)輪徑向位移隨轉(zhuǎn)數(shù)變化趨勢(shì),細(xì)實(shí)線所示為內(nèi)齒圈徑向位移隨轉(zhuǎn)數(shù)變化趨勢(shì),粗實(shí)線所示為行星輪徑向位移隨轉(zhuǎn)數(shù)變化趨勢(shì)??梢钥闯?,各結(jié)構(gòu)件徑向位移峰值隨轉(zhuǎn)數(shù)變化趨勢(shì)大致相同,只是變化幅度有較大區(qū)別。各結(jié)構(gòu)件振動(dòng)位移峰值在計(jì)算頻段內(nèi)呈現(xiàn)雙峰特征,分別對(duì)應(yīng)系統(tǒng)兩階臨界轉(zhuǎn)數(shù)。在轉(zhuǎn)數(shù)達(dá)到二階臨界轉(zhuǎn)數(shù)之前,行星架徑向振動(dòng)要大于太陽(yáng)輪徑向振動(dòng),而在轉(zhuǎn)數(shù)達(dá)到二階臨界轉(zhuǎn)數(shù)之后,太陽(yáng)輪徑向振動(dòng)要大于行星架徑向振動(dòng)。選取圖4中行星架徑向位移作為研究對(duì)象。為獲得不同轉(zhuǎn)數(shù)下行星架徑向位移的頻域特性,對(duì)從(150~7500)r/min,轉(zhuǎn)數(shù)步長(zhǎng)Δn=150r/min取50組不同轉(zhuǎn)數(shù)進(jìn)行行星架徑向振動(dòng)計(jì)算,并將結(jié)果做FFT處理,得到結(jié)果,如圖4所示。
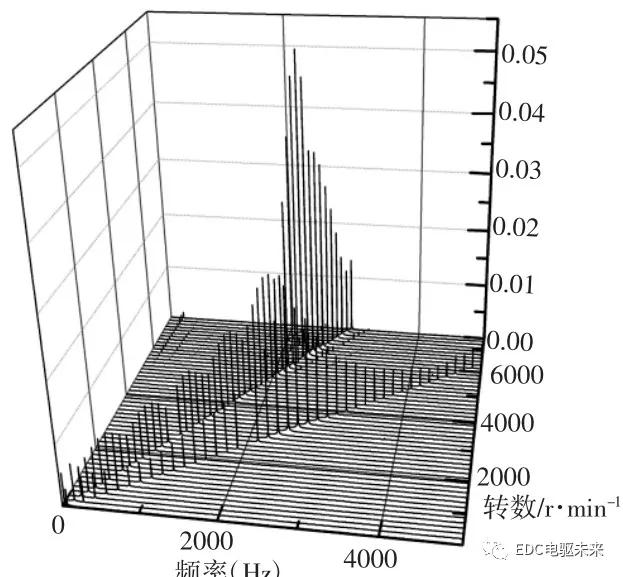
圖4不同轉(zhuǎn)數(shù)下行星架徑向振動(dòng)頻域特性
Fig.4 Radial Vibration Frequency Characteristics of the Planet Carrier Under Different Revolutions
圖4 中,行星架徑向振動(dòng)頻域結(jié)果表現(xiàn)為兩個(gè)峰值,隨著輸入轉(zhuǎn)數(shù)上升,兩峰值頻率均呈現(xiàn)線性增高趨勢(shì)。較低峰值頻率對(duì)應(yīng)行星輪n′與內(nèi)齒圈嚙合頻率fm1,而較高峰值頻率對(duì)應(yīng)太陽(yáng)輪與行星輪n的嚙合頻率fm2。fm1與fm2對(duì)應(yīng)峰值頻率對(duì)總體振動(dòng)貢獻(xiàn)情況隨轉(zhuǎn)數(shù)變化規(guī)律,如圖5所示。

圖5峰值頻率對(duì)總體振動(dòng)貢獻(xiàn)隨轉(zhuǎn)數(shù)變化情況
Fig.5 Changes of Contribution of Peak Frequency to Total Vibration with Rotation Speed
圖5 中,實(shí)線所示為fm1對(duì)總體振動(dòng)貢獻(xiàn)情況,虛線所示為fm2對(duì)總體振動(dòng)貢獻(xiàn)情況??梢钥闯?,兩峰值頻率對(duì)總體振動(dòng)貢獻(xiàn)在低頻段比較接近,在中頻段fm2對(duì)應(yīng)峰值頻率對(duì)總體振動(dòng)貢獻(xiàn)增大較快,隨后迅速衰減。在大部分頻段內(nèi)fm1對(duì)總體振動(dòng)貢獻(xiàn)較大,這一點(diǎn)在高頻段尤為明顯。這說明當(dāng)輸入轉(zhuǎn)數(shù)發(fā)生變化時(shí),行星輪n′與內(nèi)齒圈之間的嚙合振動(dòng)對(duì)行星架影響隨轉(zhuǎn)數(shù)上升呈逐步增長(zhǎng)趨勢(shì),而太陽(yáng)輪與行星輪n之間的嚙合振動(dòng)對(duì)行星架影響變化幅度較小并隨轉(zhuǎn)數(shù)上升呈先上升后迅速下降趨勢(shì)。這是由于行星輪剛度較小,行星輪n′與內(nèi)齒圈之間嚙合剛度kn′r小于太陽(yáng)輪與行星輪n之間嚙合剛度ksn,嚙合剛度較小的路徑對(duì)輸出構(gòu)件的振動(dòng)情況影響更大。此外,隨著輸入轉(zhuǎn)數(shù)的升高,對(duì)系統(tǒng)動(dòng)態(tài)特性產(chǎn)生影響的相關(guān)頻率朝高頻方向移動(dòng),這一結(jié)果對(duì)電動(dòng)車橋進(jìn)一步的隔振研究具有重要意義。
5 結(jié)論
建立了電動(dòng)車橋同軸直聯(lián)行星輪系模型,并使用Runge-Kutta方法進(jìn)行求解,得到了系統(tǒng)在不同輸入轉(zhuǎn)數(shù)下的動(dòng)態(tài)特性,之后對(duì)計(jì)算結(jié)果進(jìn)行峰值計(jì)算與時(shí)頻特性分析,得到以下結(jié)論:
(1)各構(gòu)件振動(dòng)頻域結(jié)果呈現(xiàn)雙峰值,分別對(duì)應(yīng)行星輪與內(nèi)齒圈嚙合頻率和太陽(yáng)輪與行星輪嚙合頻率,隨轉(zhuǎn)數(shù)升高峰值頻率呈線性升高趨勢(shì),嚙合剛度較小的路徑對(duì)輸出構(gòu)件的振動(dòng)情況影響更大。(2)行星輪與內(nèi)齒圈嚙合頻率對(duì)整體振動(dòng)的貢獻(xiàn)變化在二階臨界轉(zhuǎn)數(shù)前不明顯,而在二階臨界轉(zhuǎn)數(shù)后明顯上升,而后又迅速下降。(3)太陽(yáng)輪與行星輪的嚙合頻率對(duì)整體振動(dòng)的貢獻(xiàn)變化在一階臨界轉(zhuǎn)數(shù)后迅速上升,而后逐漸衰減至不明顯。在進(jìn)一步隔振設(shè)計(jì)與優(yōu)化時(shí)可根據(jù)計(jì)算結(jié)果避開臨界轉(zhuǎn)數(shù),減小傳動(dòng)系統(tǒng)振動(dòng)對(duì)整車振動(dòng)的影響,提升電動(dòng)汽車NVH性能。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 70



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
