




 廣告
廣告





















































交通擁堵輔助TJA中的詳細(xì)設(shè)計原理
2020-07-20 17:49:49· 來源:焉知自動駕駛 作者:Aimee

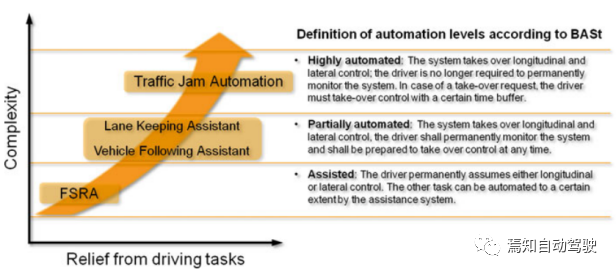
交通擁堵輔助TJA作為智能駕駛二級功能,可以幫助駕駛員在堵車時候,為駕駛員提供一定的駕駛輔助,緩解駕駛員的疲勞。與智能駕駛一級功能ACC(只進(jìn)行縱向控制不同
交通擁堵輔助TJA作為智能駕駛二級功能,可以幫助駕駛員在堵車時候,為駕駛員提供一定的駕駛輔助,緩解駕駛員的疲勞。與智能駕駛一級功能ACC(只進(jìn)行縱向控制不同)不同,TJA需要進(jìn)行橫縱雙向控制,它是ACC功能的一個拓展版,可以跟ACC一樣走走停停,但增加了輕微轉(zhuǎn)向調(diào)整的功能。TJA需要對車道標(biāo)志以及車輛的位置和運動的檢測,從而可以為后續(xù)模型計算提供有力的輸入。與高速車輛根據(jù)檢測到的車道線做對中行駛不同,TJA可以做到在無完整車道線的情況下,根據(jù)前車行駛軌跡做跟隨行駛。
TJA系統(tǒng)功能迭代圖
對于一般的TJA控制策略而言,只需要利用前視攝像頭對前方車輛和道線進(jìn)行檢測作為系統(tǒng)控制的輸入,而由于全景系統(tǒng)配置的側(cè)面和后視攝像頭則可以監(jiān)視并排行駛的汽車或與汽車并排的車道標(biāo)記,因此高級別TJA對于車輛側(cè)面和后方的交通信息全面檢測也可以為駕駛員提供更為全面的駕駛輔助。

總體來說,TJA的軌跡預(yù)測過程包括對于靜態(tài)環(huán)境估計(如車道模型),環(huán)境過程估計(一般指車道環(huán)境中行駛的車輛),此外,還包括附加傳感器(諸如導(dǎo)航信息、環(huán)視攝像頭信息等)對TJA估計過程的優(yōu)化。
靜態(tài)環(huán)境估計
靜態(tài)環(huán)境估計一般指對于行駛車道模型估計,車道模型的一般估計方法是采用拋物線形式進(jìn)行,而以自車坐標(biāo)為原點建立的車道拋物線模型表示為

該拋物線只有兩個參數(shù),其求解過程是通過在實際估計過程中對道路模型中的兩個實際障礙點的探測,其結(jié)果便可帶入到拋物線中進(jìn)行二參數(shù)方程求解。同時通過不斷更新的實際點帶入方程求解后獲得不同的方程參數(shù)解,對方程解的評價過程是利用直方圖描述其求解質(zhì)量的,若實際探測到的前方目標(biāo)位置與預(yù)測軌跡曲線差值不具有一致性,那么相應(yīng)的直方圖分布就比較零散,不具有集中分布的特性。直方圖具有收斂一致性時,說明求解的拋物線方程是有效的。
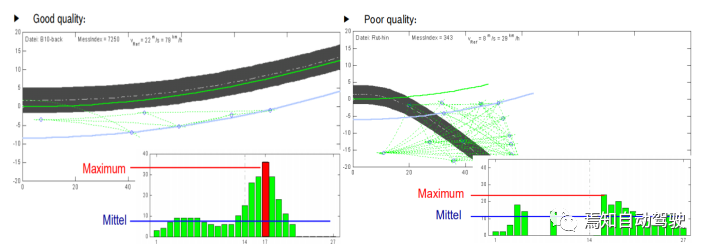
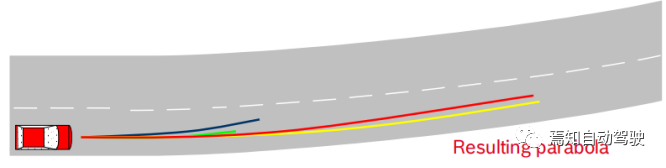
如下圖表示采用了靜態(tài)環(huán)境估計模型利用不同探測點對于車道曲線模型進(jìn)行估計的結(jié)果??梢钥闯?,其中紅色的估計曲線模型具有最好的質(zhì)量權(quán)重,其軌跡結(jié)果最符合預(yù)期。
動態(tài)過程估計
動態(tài)過程估計是指對于目標(biāo)車輛的行駛軌跡預(yù)測,有兩種不同的計算TJA行駛軌跡的方法,其一是關(guān)注附近運動車輛的位置,而另一個涉及車道標(biāo)記。由于環(huán)境探測過程中不止一輛車,因此相應(yīng)的估計過程包含如下幾個步驟:
1)傳感器探測到環(huán)境中的所有車輛目標(biāo),TJA系統(tǒng)模型對于所有運動車輛的歷史軌跡進(jìn)行估算;
2)選擇自車前方對應(yīng)的車輛作為跟隨目標(biāo),且該對應(yīng)前方車輛需要去除對向來車對本車軌跡估計的影響;
3)采用如上提到的曲線模型對實際探測到的同向行駛車輛進(jìn)行軌跡預(yù)測,并對于預(yù)測結(jié)果進(jìn)行分組;
4)計算估計軌跡質(zhì)量,質(zhì)量評估采用權(quán)重分配,權(quán)重最高的最為軌跡曲線的計算結(jié)果;
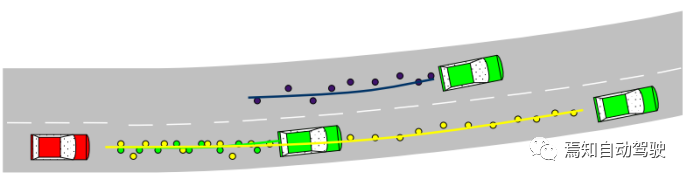
如下圖表示了對于前方車輛以及側(cè)前方車輛按照實時打點進(jìn)行估計的結(jié)果,其中前方車輛的行駛軌跡在預(yù)測中最能擬合出一條一致性曲線,因刺激具備較好的質(zhì)量以及連續(xù)性。由此可以暫時摒除旁邊車道車輛對本車道的影響。
下面我們將專注于對本車道行駛車輛的軌跡過程估計方法:
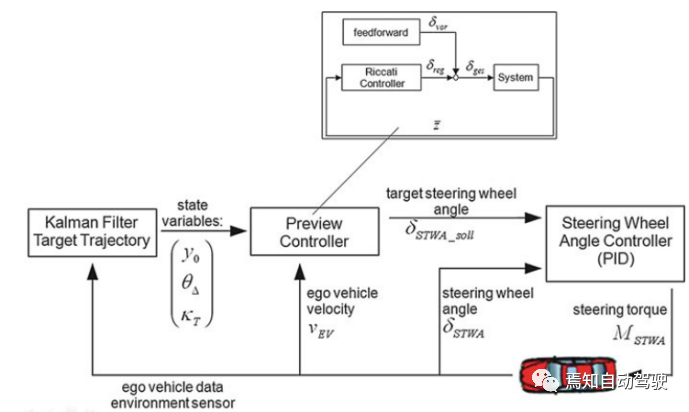
TJA的控制邏輯中有兩種不同的信息需要輸入來計算目標(biāo)軌跡,其一是考慮相鄰前方車輛位置以及運動狀態(tài),其二是考慮車道標(biāo)線;為了獲得TJA可用于控制的路徑,其目標(biāo)軌跡必須包含帶有一定偏移量的數(shù)據(jù)信息,該偏移量表示為偏離車道中心線的距離,表示為y0,與軌跡相關(guān)的航向角θΔ,曲率κT。設(shè)計TJA行駛軌跡過程實際是采用預(yù)測加更新的方式進(jìn)行,預(yù)測即通過對前一時刻的目標(biāo)行駛狀態(tài)的探測生成相應(yīng)的預(yù)測軌跡從而來確定最新行駛軌跡的估算。因此,TJA的軌跡計算過程主要采用了卡爾曼濾波器設(shè)計策略,如上相應(yīng)的橫向控制輸入值,可以作為控制卡爾曼濾波的觀測值,如下將詳細(xì)講解如何設(shè)計TJA的卡爾曼濾波器。
對于TJA的軌跡預(yù)測過程中,首先需要考慮其預(yù)測函數(shù)方程,如下圖表示出了以自車為中心建立的軌跡預(yù)測圖,其中紅色線表示預(yù)測軌跡,車輛自身的運動狀態(tài)包含相應(yīng)的車速VEV,航向角βEV,橫擺率ΨEV,PT(xT/yT)表示預(yù)測到的前方車輛的即時軌跡上的坐標(biāo)點,該點表示下一時刻前車將要行駛到該處。
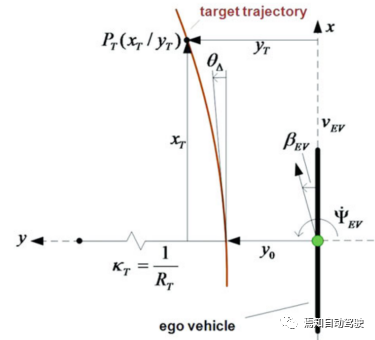
引導(dǎo)軌跡示意圖
如下方程可用于表示一輛運動車輛沿著一條軌跡進(jìn)行行進(jìn)的過程:

如下圖表示為橫向環(huán)路控制系統(tǒng);
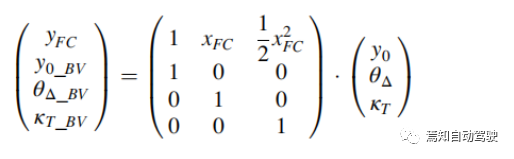
為了將前車PFC(xFC/yFC) 相對位置考慮進(jìn)來,我們假設(shè)前方車輛將跟隨其目標(biāo)軌跡進(jìn)行運動,即xT = xFC,yT = yFC,相應(yīng)的關(guān)系可表示如下:

同時,如果攝像頭仍舊能夠檢測到部分車道標(biāo)線信息,該標(biāo)線相對于車道中心線的距離為y0_BV,與車道線方向為θΔ_BV,車道曲率為κT_BV,由此可以直接計算出相對于車道中心線的目標(biāo)路徑,而索引BV表示來自于攝像機(jī)圖像處理后的的車道標(biāo)線信息。
由此得到利用車道標(biāo)線信息計算出的軌跡方程為:
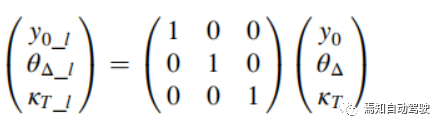
當(dāng)前方信息缺失時,如上相應(yīng)的公式將變成如下形式。
如上1表示為計算目標(biāo)軌跡的相關(guān)信心來自于不同的而信息源,設(shè)置該變量是為了激活TJA系統(tǒng)前,在環(huán)境中捕獲冗余信息作為函數(shù)輸入,比如前視攝像頭、泊車攝像頭或高精度地圖等。系統(tǒng)必須設(shè)計成當(dāng)車輛無法處理極限工況時,其該冗余信息可以用于幫助駕駛員在其反應(yīng)時間內(nèi)接管系統(tǒng)。同時,由于以上兩種不同的信息來源(道線和前車)均可以計算相應(yīng)的目標(biāo)軌跡,而最終的目標(biāo)軌跡實際是希望采用最好質(zhì)量的信息作為輸入源。這里我們可以采用協(xié)方差Q來作為采用前方引導(dǎo)車或者車道標(biāo)線的權(quán)重。最終選擇的向量以及相對目標(biāo)軌跡可以用來調(diào)整橫向控制,確保最終的轉(zhuǎn)向靠近目標(biāo)導(dǎo)線。
當(dāng)對目標(biāo)進(jìn)行探測并獲得其質(zhì)量信息q時,可以利用靜態(tài)目標(biāo)過程估計SCP以及環(huán)境目標(biāo)過程估計ECP相結(jié)合的方式,進(jìn)行終極環(huán)境建模,相應(yīng)的模型如下:
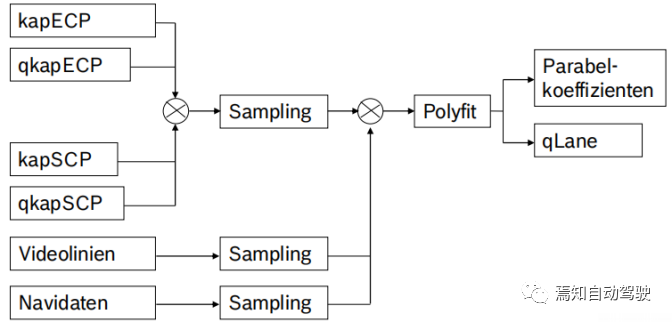
如上圖中,當(dāng)利用環(huán)境估計數(shù)據(jù)ECP及其質(zhì)量數(shù)據(jù)與靜態(tài)過程估計數(shù)據(jù)及其質(zhì)量數(shù)據(jù)作為輸入時,采用上采樣數(shù)據(jù)形式對其整體數(shù)據(jù)進(jìn)行采樣后形成基礎(chǔ)數(shù)據(jù),然后利用諸如附加攝像頭(全景系統(tǒng))、高精度導(dǎo)航系統(tǒng)探測到的實際進(jìn)行結(jié)合后,通過擬合多項式系數(shù)方式生成預(yù)測方程多項式系數(shù),并同時生成帶有質(zhì)量信息的虛擬車道信息。
總結(jié)
TJA適用于當(dāng)攝像頭等傳感器檢測不到車道標(biāo)線信息時,利用前方探測到的車輛信息進(jìn)行橫向控制,由于ADAS車輛的攝像頭通常安裝在擋風(fēng)玻璃后方,故前方較低速的相鄰車輛通常會遮擋當(dāng)前車輛攝像頭對目標(biāo)車道線的檢測,而在交通擁堵的情況下,前方車輛的探測信息對于當(dāng)前車輛的軌跡預(yù)測規(guī)劃則更可靠、更穩(wěn)定。因此,這種情況下應(yīng)該在車道線消失點繼續(xù)跟隨可探測的前車保持橫向?qū)χ行旭?。此外,在很多低速情況下,當(dāng)其前視攝像頭探測視野范圍受阻,則可以利用在泊車控制中的環(huán)視攝像頭進(jìn)行道線探測,并維持車輛對中到車道中央繼續(xù)行進(jìn),因為環(huán)視攝像頭的探測距離和探測范圍有限,因此該策略僅適合于跟隨前車停走狀態(tài)下的低速行駛,配合跟車軌跡行駛控制,可以進(jìn)一步延長擁堵狀態(tài)下的橫向控制時間。
對于TJA過程估計中需要根據(jù)其定義的可行駛區(qū)域來劃分相應(yīng)的前方交通參與者,并定義其與自車的偏移量。在TJA中,當(dāng)沒有車道線信息時,對于十分復(fù)雜的交通情況不太可能被直接分析出來,比如當(dāng)車道線消失時刻點不是平行狀態(tài)時,可能造成后續(xù)對于虛擬車道線的模擬無法繼續(xù)進(jìn)行。



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
