




 廣告
廣告





















































ADAS系統(tǒng)對實(shí)際駕駛路面的偏移控制優(yōu)化
2020-08-14 15:46:52· 來源:焉知自動(dòng)駕駛 作者:Aimee

目前上市的自動(dòng)駕駛輔助車型中,相當(dāng)一部分已經(jīng)搭載了自動(dòng)駕駛二級(jí)橫向控制系統(tǒng),由于該系統(tǒng)完全由自動(dòng)駕駛系統(tǒng)控制橫向偏移量,故需要建立與轉(zhuǎn)向控制系統(tǒng)EPS之
目前上市的自動(dòng)駕駛輔助車型中,相當(dāng)一部分已經(jīng)搭載了自動(dòng)駕駛二級(jí)橫向控制系統(tǒng),由于該系統(tǒng)完全由自動(dòng)駕駛系統(tǒng)控制橫向偏移量,故需要建立與轉(zhuǎn)向控制系統(tǒng)EPS之間的控制連接。而當(dāng)前上市的自動(dòng)駕駛車型中針對橫向控制這一功能抱怨點(diǎn)坡多,主要體現(xiàn)在如下幾個(gè)方面:
1)橫向控制不穩(wěn)定,相同道路容易受到顛簸、滑移等影響嚴(yán)重,出現(xiàn)跑偏或方向盤來回?cái)[動(dòng);
2)橫向控制能力不足,不同道路曲率下過彎道,常出現(xiàn)過彎能力不足,信心感不強(qiáng);
3)顛簸、滑移的路面行駛過程中,容易導(dǎo)致目標(biāo)誤識(shí)別、漏識(shí)別甚至突然丟失后導(dǎo)致ACC快速異常退出;
容易出現(xiàn)如上情況的場景統(tǒng)計(jì)示意圖如下:
對于以上情況,通過排查發(fā)現(xiàn)主要由以下原因:
1)車輛動(dòng)力學(xué)影響車道檢測精度
在表面不穩(wěn)定的情況下,自我運(yùn)動(dòng)行為將發(fā)生變化,例如偏航率突然跳躍,這將導(dǎo)致對車道邊界的跟蹤不正確。由于基于車道邊界屬性計(jì)算了控制扭矩,因此可以在短時(shí)間內(nèi)改變橫向偏差和曲率,可能會(huì)發(fā)生控制轉(zhuǎn)矩的變化。

2)道路摩擦力影響扭矩響應(yīng)
如果在不穩(wěn)定的路面上行駛,特別是在高速行駛時(shí),車輛會(huì)有跳動(dòng)的趨勢,在跳動(dòng)過程中,地面摩擦力會(huì)大大降低,在這種情況下,轉(zhuǎn)向系統(tǒng)對相同控制扭矩的反作用將改變。通常,在摩擦力減小之后,轉(zhuǎn)向系統(tǒng)將產(chǎn)生更大的方向盤角度。相同的扭矩控制下的車輛可能會(huì)發(fā)生運(yùn)動(dòng)狀態(tài)的突然變化。

3)輪胎附著力
在不穩(wěn)定的路面上行駛時(shí),道路可能會(huì)對車輪產(chǎn)生作用力,這意味著,如果路面不平坦,車輪力將導(dǎo)致車輪角度改變,車輪角度將導(dǎo)致方向盤角度改變,此時(shí)道路將推動(dòng)車輪分別從內(nèi)部和外部產(chǎn)生不同程度的滑移。這種行為在沒有配備EPS的舊車中非常流行,由于EPS阻尼邏輯,這種行為可以大大減少,但仍然存在。在車道對中控制期間,EPS助力性能與通常不同,側(cè)向控制扭矩將與方向盤反作用力重疊,這可能會(huì)導(dǎo)致駕駛員對方向盤控制需要更大的作用力。

從執(zhí)行器方面推薦相關(guān)性能提升措施
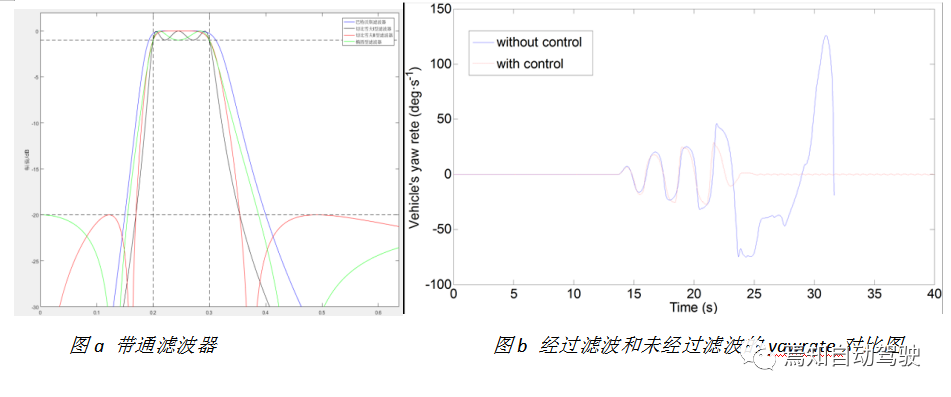
1、對偏航率Yawrate進(jìn)行濾波處理
由于輸入的偏航率由于地面坑洼出現(xiàn)跳變時(shí)影響自車對目標(biāo)的識(shí)別判斷,對于由于路面引起的顛簸導(dǎo)致的偏航率變化一般屬于高斯白噪聲,可以根據(jù)先前前一時(shí)刻檢測到的可用yawrate附件偏移量設(shè)置一個(gè)簡單的帶通濾波器,當(dāng)某一時(shí)刻由于路面顛簸導(dǎo)致yawrate值出現(xiàn)突變時(shí),就會(huì)由于將該yawrate輸入帶通濾波器,對于通帶內(nèi)的yawrate信號(hào)才認(rèn)為滿足要求,將其保留下來,從而去除濾波顛簸的毛刺,以做到平滑yawrate的目的。
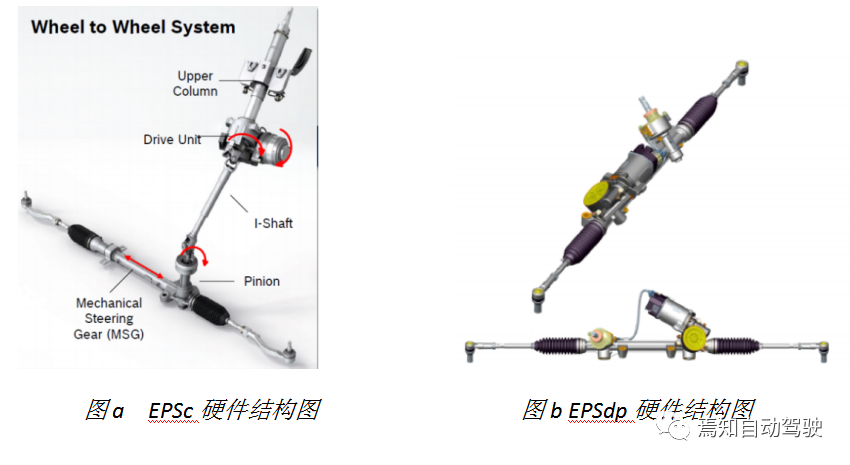
2、推薦采用小齒輪式EPSdp代替轉(zhuǎn)向柱式EPSc
轉(zhuǎn)向柱式電動(dòng)助力轉(zhuǎn)向“EPSc”是一種機(jī)電一體化的新一代汽車智能助力轉(zhuǎn)向裝置。助力電機(jī)直接在轉(zhuǎn)向柱上施加助力,在不同車況下汽車轉(zhuǎn)向時(shí),它通過電子控制裝置,使轉(zhuǎn)向助力電機(jī)產(chǎn)生所需的輔助力。小齒輪式EPSdp是電機(jī)直接將助力加在齒條上,通過EPS輔助單元與齒條軸的一體化,提高了輕量化及裝配緊密性。從體系結(jié)構(gòu)中可以很容易地看出,系統(tǒng)電源應(yīng)當(dāng)通過EPSc的整個(gè)I型軸,極大地增加了傳輸延遲(?150ns),而EPSc由于傳輸時(shí)間長于EPSdp,導(dǎo)致EPSc的反應(yīng)也比EPSdp慢,則其性能將無法與EPSdp相比較。
在顛簸路面控制過程中產(chǎn)生基本行駛問題的原因是EPS響應(yīng)ADAS輸出的扭矩請求超調(diào)了,而為了獲得更好的性能,其EPS響應(yīng)駕駛員的扭矩輸出應(yīng)該更小,從而與路面影響結(jié)果疊加后不會(huì)產(chǎn)生超調(diào)或抖動(dòng)。
因此在EPS響應(yīng)過程中需要充分考慮如下要素:
1)為了減少反應(yīng)時(shí)間延遲期→需要更高的扭矩增益;
2)為了提升車輛穩(wěn)定性和優(yōu)化駕駛員的手感→需要降低扭矩增益;
基于現(xiàn)有車輛的性能,沒有解決方案可以同時(shí)優(yōu)化兩者。從技術(shù)上講,也沒有解決方案可以實(shí)現(xiàn)基于EPS架構(gòu)的完美性能,我們的建議是:
1)增加增益因子作為轉(zhuǎn)向扭矩響應(yīng)的補(bǔ)充,以達(dá)到最優(yōu)的橫向控制性能;
2)通過標(biāo)定平衡數(shù)據(jù),滿足讓大多數(shù)的駕駛員無抱怨;
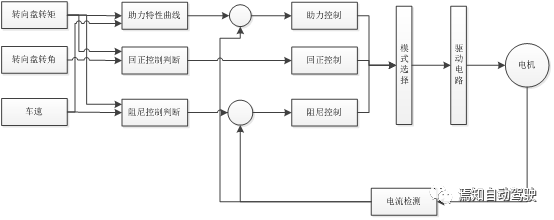
3、改善EPS阻尼
當(dāng)前EPS最常見的控制策略有三種,分別是助力控制、回正控制、阻尼控制。助力控制是最基本的控制策略,當(dāng)ADAS系統(tǒng)判斷需要進(jìn)行轉(zhuǎn)向時(shí),EPS提供輔助的轉(zhuǎn)向力矩,幫助系統(tǒng)完成轉(zhuǎn)向?;卣刂剖峭ㄟ^檢測駕駛員作用的轉(zhuǎn)矩大小和方向盤轉(zhuǎn)角及其運(yùn)動(dòng)狀態(tài)來判斷汽車是否在回正狀態(tài),一旦進(jìn)入符合回正條件,就進(jìn)行回正控制,讓轉(zhuǎn)向盤快速準(zhǔn)確地回到中間位置。阻尼控制主要是針對高速工況,阻尼控制保證汽車直線行駛的穩(wěn)定性,改善道路顛簸帶來的抖動(dòng)感。
EPS阻尼邏輯將對控制產(chǎn)生很大影響,如果阻尼性能更強(qiáng),則車輛轉(zhuǎn)向會(huì)更穩(wěn)定。但事實(shí)阻尼過大對于駕駛員手力控制感也會(huì)產(chǎn)生相應(yīng)的影響。為了提升轉(zhuǎn)向穩(wěn)定性,防止振蕩,EPS的阻尼邏輯應(yīng)做如下兩個(gè)方面的策略調(diào)整:
1)阻尼做隨速控制
由于汽車行駛時(shí)車速是一個(gè)變化量,車速的變化就要求不斷進(jìn)行阻尼與助力控制的切換。為此,阻尼力矩應(yīng)隨車速增大而增大,以增加駕駛員的手感。同時(shí),需要考慮考慮三個(gè)主要問題:一是為了滿足避障的緊急行駛工況,阻尼力不能太大,二是為了滿足高速行駛穩(wěn)定性,給駕駛員足夠的行駛感,阻尼力不能太小,三是為了滿足全車速轉(zhuǎn)向中手感平順,要解決在助力和阻尼切換中的平滑過渡。
2)改進(jìn)助力特性曲線
為了衰減路面的沖擊,阻尼控制要體現(xiàn)削弱抖動(dòng)的功能,這就基于ADAS期望的轉(zhuǎn)向力矩基礎(chǔ)上,改進(jìn)設(shè)計(jì)助力特性曲線。
從ADAS系統(tǒng)控制器推薦相關(guān)性能提升措施
當(dāng)然,除了從執(zhí)行器方面尋找“顛簸”路面對ADAS響應(yīng)影響的解決措施,也可以從ADAS系統(tǒng)控制器中尋找相關(guān)解決措施。
1、采用嵌套PID控制轉(zhuǎn)向扭矩的發(fā)出。
如下圖所示,采用不同的PID對ADAS系統(tǒng)輸入的值進(jìn)行局部控制,針對相應(yīng)的不同的結(jié)果反饋到輸入端進(jìn)行局部調(diào)節(jié),一部分是ADAS系統(tǒng)將發(fā)出扭矩值(set Value requirement)需求發(fā)送給輔助扭矩決策器(Assistance torque determination),通過濾波(limiter)處理后輸出局部設(shè)置值給EPS進(jìn)行響應(yīng)。另一部分通過第一步中的決策響應(yīng)值對輸入調(diào)節(jié)增益,從而抑制車身轉(zhuǎn)向抖動(dòng),最終通過限流器確保輸出扭矩穩(wěn)定性。
2、使用角度代替扭矩
當(dāng)前大部分ADAS發(fā)出控制轉(zhuǎn)向請求都是采用了扭矩形式,而轉(zhuǎn)向角度(方向盤角度或輪向角度),與反作用力和摩擦力無關(guān),EPS控制執(zhí)行到位的轉(zhuǎn)向角度才可以表示出最終的轉(zhuǎn)向狀態(tài),因此對于系統(tǒng)所期望的最終狀態(tài)采用轉(zhuǎn)向角形式可以直接進(jìn)行控制,除了感知問題外,其他執(zhí)行問題均可以消除。
當(dāng)然用角度代替扭矩也會(huì)有另外一個(gè)問題就是其在ADAS角度控制期間,駕駛員如果想要進(jìn)行超越從系統(tǒng)中取回駕駛控制權(quán),會(huì)存在手感發(fā)硬或無法及時(shí)接管的情況,后續(xù)我們會(huì)專門針對這一ADAS駕駛控制中的缺陷解決方案做詳細(xì)介紹。
總結(jié)
當(dāng)前自動(dòng)駕駛開發(fā)過程中已經(jīng)開始使用較好的工具對實(shí)際駕駛環(huán)境及道路狀態(tài)進(jìn)行仿真測試,以便提前規(guī)避很多環(huán)境因素對駕駛控制造成的不穩(wěn)定性,然而,對于實(shí)際路面顛簸,滑移、臨時(shí)上下坡等還沒辦法做到很好的問題規(guī)避及管控,這就造成了在售后市場出現(xiàn)各種由于駕駛路面環(huán)境對車輛不穩(wěn)定性產(chǎn)生的抱怨。
點(diǎn)贊 0 反對 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 52



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
