




 廣告
廣告





















































首頁(yè) > 汽車測(cè)試技術(shù) > 正文
如何為自動(dòng)駕駛汽車構(gòu)建行為預(yù)測(cè)模型:使用Lyft Level 5的預(yù)測(cè)數(shù)據(jù)集訓(xùn)練機(jī)器學(xué)習(xí)運(yùn)動(dòng)預(yù)測(cè)模型
2020-10-19 20:43:10· 來源:汽車電子與軟件 作者:Luca Bergamini

預(yù)測(cè)自動(dòng)駕駛汽車(AV)周圍的實(shí)體的行為是實(shí)現(xiàn)全自動(dòng)駕駛的關(guān)鍵難題之一。使用我們的預(yù)測(cè)數(shù)據(jù)集和L5級(jí)工具包,您可以在一個(gè)閑暇的下午或周末開始構(gòu)建行為預(yù)測(cè)模
預(yù)測(cè)自動(dòng)駕駛汽車(AV)周圍的實(shí)體的行為是實(shí)現(xiàn)全自動(dòng)駕駛的關(guān)鍵難題之一。使用我們的預(yù)測(cè)數(shù)據(jù)集和L5級(jí)工具包,您可以在一個(gè)閑暇的下午或周末開始構(gòu)建行為預(yù)測(cè)模型,即使您之前沒有任何有關(guān)自動(dòng)駕駛汽車的經(jīng)驗(yàn)。如果成功了,您可以幫助推動(dòng)自動(dòng)駕駛行業(yè)整體向前發(fā)展,如果您的解決方案在我們的Kaggle競(jìng)爭(zhēng)中取得優(yōu)勝,您甚至可以贏得我們30000美元獎(jiǎng)金的一部分。
什么是行為預(yù)測(cè)?為什么它這么重要?
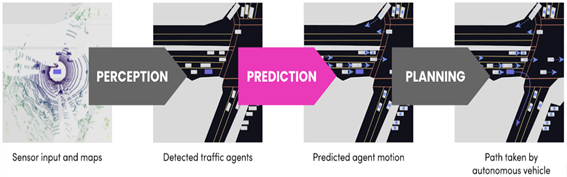
讓我們從自動(dòng)駕駛汽車的工作原理開始。在自動(dòng)駕駛堆棧中,構(gòu)建自動(dòng)駕駛系統(tǒng)的第一步是感知(識(shí)別我們周圍的事物)。接下來的兩個(gè)任務(wù)是預(yù)測(cè)(決定下一步會(huì)發(fā)生什么)和計(jì)劃(決定自動(dòng)駕駛汽車將來要做什么)。我們正專注于第二項(xiàng)任務(wù)。
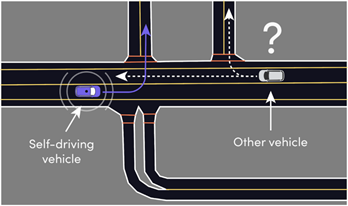
自動(dòng)駕駛汽車需要能夠?qū)ξ磥碜龀鲱A(yù)測(cè)——這是人類駕駛員一直在潛意識(shí)里做的事情。想象一下,當(dāng)一輛自動(dòng)駕駛汽車在路上直行,并嘗試左轉(zhuǎn),而這時(shí)有另一輛車從相反的方向駛來。為了讓自動(dòng)駕駛汽車安全地執(zhí)行此操作,它需要確定另一輛車是右轉(zhuǎn)還是繼續(xù)直行并干擾它的左轉(zhuǎn)。這就是行為預(yù)測(cè)。
盡管感知技術(shù)在自動(dòng)駕駛行業(yè)已經(jīng)發(fā)展得較為成熟了,但預(yù)測(cè)和規(guī)劃仍需改進(jìn)。那么為什么這兩部分在自動(dòng)駕駛堆棧中的問題還沒解決呢?
目前,行為預(yù)測(cè)和規(guī)劃的模型主要是使用基于規(guī)則的系統(tǒng)建立的。然而,未來是不確定的,規(guī)則可能并不總是隨不確定性而變化。當(dāng)您將其他實(shí)體添加到組合中時(shí),規(guī)則的數(shù)量和制定規(guī)則的成本將成倍增長(zhǎng)。深度監(jiān)督學(xué)習(xí)方法可以解決這一問題,但需要大量數(shù)據(jù)來正確捕捉道路上罕見和意外的行為。好消息是:我們的預(yù)測(cè)數(shù)據(jù)集是同類數(shù)據(jù)集中最大的,并且包含了這些罕見的行為。

訓(xùn)練你的模型
要訓(xùn)練你的模型,你需要:
1.下載Lyft L5級(jí)預(yù)測(cè)數(shù)據(jù)集
2.獲取任務(wù)的輸入和輸出數(shù)據(jù)
3.定義模型
4.訓(xùn)練模型
為了簡(jiǎn)化這些步驟,我們準(zhǔn)備了一個(gè)Jupyter筆記本。
1.下載L5級(jí)預(yù)測(cè)數(shù)據(jù)集
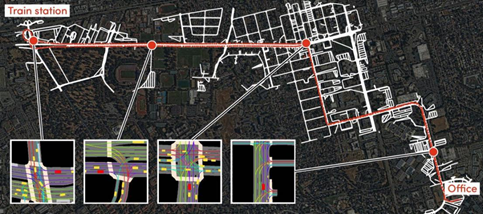
訪問我們的預(yù)測(cè)數(shù)據(jù)集網(wǎng)頁(yè)注冊(cè)并下載數(shù)據(jù)集。該數(shù)據(jù)集包括我們?cè)诩永D醽喼菖谅灏柾惺惺占某^16000英里的1000小時(shí)的行駛數(shù)據(jù)。我們已經(jīng)在內(nèi)部生產(chǎn)感知堆棧中運(yùn)行了數(shù)據(jù)集,因?yàn)楹茈y從原始數(shù)據(jù)開始構(gòu)建預(yù)測(cè)模型。這意味著您可以立即開始為交通環(huán)境中的實(shí)體(在我們的感知輸出中,已經(jīng)進(jìn)行了辨別)構(gòu)建運(yùn)動(dòng)預(yù)測(cè)模型了,并根據(jù)我們的正確標(biāo)注來把握您的進(jìn)度。
除了數(shù)據(jù)之外,我們還提供一張航空地圖和由五級(jí)自動(dòng)駕駛研究人員注釋的高清晰度語(yǔ)義地圖。
2.為任務(wù)獲取輸入和輸出
預(yù)測(cè)數(shù)據(jù)集以不同的時(shí)間戳記錄自動(dòng)駕駛汽車周圍的世界。每個(gè)時(shí)間戳包括:
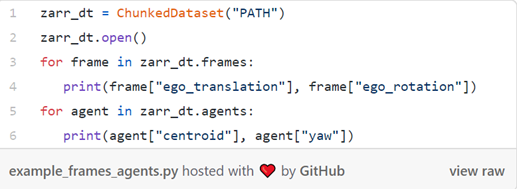
1. 幀
幀是自動(dòng)駕駛汽車本身的記錄。包含它的位置和旋轉(zhuǎn),以及在那一瞬間檢測(cè)到的所有實(shí)體和紅綠燈的列表。
2. 實(shí)體
實(shí)體是真實(shí)世界中可移動(dòng)的實(shí)體。實(shí)體通過類別(汽車、行人等)和位置信息進(jìn)行標(biāo)記。實(shí)體也有唯一的身份,通過連續(xù)的幀進(jìn)行追蹤。
獲取幀和實(shí)體的信息非常簡(jiǎn)單,只需運(yùn)行以下代碼片段:
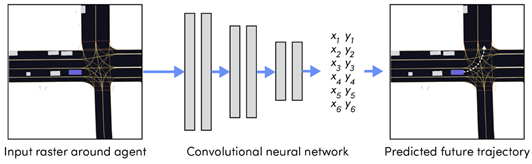
在處理自動(dòng)駕駛數(shù)據(jù)時(shí),一個(gè)常見的選擇是使用俯視圖(BEV)柵格化來輸入系統(tǒng),該輸入由場(chǎng)景的自頂向下的視圖組成。這簡(jiǎn)化了模型的構(gòu)建,因?yàn)檩斎牒洼敵龅淖鴺?biāo)空間是相同的。
獲得俯視圖和用來訓(xùn)練DCNN的輸出軌跡,只需要運(yùn)行以下代碼:

3.定義模型
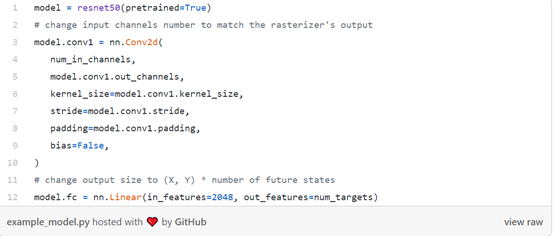
定義一個(gè)使用輸入和輸出進(jìn)行訓(xùn)練的模型。您可以通過調(diào)整標(biāo)準(zhǔn)CNN架構(gòu)(例如ResNet50)來創(chuàng)建一個(gè)簡(jiǎn)單的基線。盡管您可以保留原網(wǎng)絡(luò)的核心部分,但您需要更改其輸入和輸出層以匹配您的設(shè)置。
為此,將第一個(gè)卷積層中的通道數(shù)與俯視圖中的通道數(shù)匹配。一個(gè)3通道的卷積層不足以將不同層次的不同語(yǔ)義信息柵格化。下一步,確保輸出數(shù)與您未來的預(yù)測(cè)范圍(下面的示例中使用XY位移表示)相匹配。對(duì)于50步的視野,最后一層網(wǎng)絡(luò)總共需要100個(gè)神經(jīng)元。
在Pythorch中,是下面這樣的:
4.訓(xùn)練模型
現(xiàn)在一切準(zhǔn)備就緒,您可以根據(jù)數(shù)據(jù)訓(xùn)練基線模型了。將俯視圖輸入該模型,預(yù)測(cè)未來的軌跡。您可以設(shè)置均方誤差(MSE)標(biāo)準(zhǔn),并使用ADAM優(yōu)化器優(yōu)化網(wǎng)絡(luò)。在Pythorch中,是下面這樣:
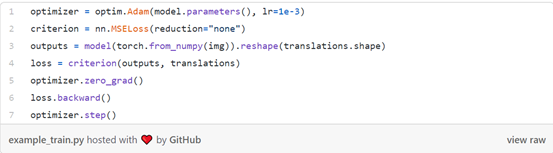
我們也可以在幾次迭代后,在以自動(dòng)駕駛汽車為中心的俯視圖光柵上繪制預(yù)測(cè)的軌跡。
進(jìn)一步訓(xùn)練你的模型
以下是一些改進(jìn)和測(cè)試模型的一些想法和小技巧:
l 如果你想提高速度并想用EfficientNet來取代ResNet,只需更換第一層和最后一層。
l 想看看實(shí)體的歷史記錄是否可以提高性能嗎?這只是一個(gè)改變一個(gè)配置值的問題,一切都是現(xiàn)成的。
l 如果光柵看起來太粗糙,可以提高其分辨率,甚至可以更改其縱橫比。
l 每個(gè)實(shí)體僅一條軌跡不足以捕捉不確定性?我們已經(jīng)提供了多模型預(yù)測(cè)的評(píng)分標(biāo)準(zhǔn),因此您可以直接了解您的模型是否有改進(jìn)。
作者:Luca Bergamini,軟件工程師;Vladimir Iglovikov,軟件工程師;Filip Hlasek,工程經(jīng)理;Peter Ondruska,L5級(jí)自動(dòng)駕駛研究主管。
翻譯:涅槃汽車
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 68



 廣告
廣告 編輯推薦




最新資訊
-
聯(lián)合國(guó)法規(guī)R60對(duì)兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項(xiàng)|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評(píng)價(jià)開始從“電池單體性能指標(biāo)”轉(zhuǎn)
2026-03-04 11:38
