




 廣告
廣告





















































汽車高速行駛時(shí)自動(dòng)緊急轉(zhuǎn)向避撞的前饋與反饋跟蹤控制的研究
2021-09-12 20:09:05· 來源:汽車制動(dòng)之家

3 前饋與反饋跟蹤控制
車輛轉(zhuǎn)向避撞過程可分成兩個(gè)操縱階段,即車道變換和車道保持。本文中在車輛軌跡跟蹤控制的設(shè)計(jì)上相應(yīng)地包括兩個(gè)部分:前饋控制和反饋控制。其中,前饋控制主要用于車輛在換道過程中的軌跡跟蹤,同時(shí)縮短車輛跟蹤預(yù)定路徑的反應(yīng)時(shí)間。理論上講,只要前饋模型足夠準(zhǔn)確,前饋得出的前輪轉(zhuǎn)角施加給車輛的響應(yīng)與參考軌跡應(yīng)該沒有差異。但實(shí)際上,任何車輛模型都不可能絕對(duì)精確。此外,在車輛行駛過程中不可避免地出現(xiàn)其它擾動(dòng)情況,如側(cè)向風(fēng)干擾,因此,還須對(duì)轉(zhuǎn)向系統(tǒng)進(jìn)行額外的反饋控制。反饋控制一方面用來修正因擾動(dòng)、噪聲和參數(shù)不確定性引起的誤差,另一方面則用來保證車輛在換道后的軌跡保持,確保路徑跟蹤的精確性。
前饋控制所需的轉(zhuǎn)向盤轉(zhuǎn)角可通過預(yù)先獲得的參考路徑和車輛模型計(jì)算得出。由于實(shí)際車輛的轉(zhuǎn)向傳遞特性非常復(fù)雜,而且非線性因素難以用于前饋控制器的設(shè)計(jì),因此,在前饋控制器的設(shè)計(jì)上對(duì)車輛的轉(zhuǎn)向傳遞特性采用了較為簡(jiǎn)單的線性2自由度轉(zhuǎn)向動(dòng)力學(xué)模型,即

式中:ωr為跟蹤參考路徑的橫擺角速度;i為轉(zhuǎn)向盤角傳動(dòng)比;v為車速;L為軸距;δFF為所需的前饋車輪轉(zhuǎn)角;K為車輛穩(wěn)定性因數(shù)。
在輸出反饋控制器的設(shè)計(jì)中,車輛相對(duì)道路的側(cè)向位置通常以車輛某一前部位置(預(yù)瞄點(diǎn))為基準(zhǔn)。若假定方向角誤差e2很小,則弦長可近似等于弧長,車輛參考路徑y(tǒng) ref相對(duì)實(shí)際行駛路徑y(tǒng) p的側(cè)向偏差ey可通過當(dāng)前時(shí)刻側(cè)向位移偏差e1、預(yù)瞄距離d s和方向角誤差e2計(jì)算得出。同時(shí),由于PID控制算法簡(jiǎn)單,有較好的魯棒性和可靠性,因此采用PID控制算法實(shí)現(xiàn)車輛側(cè)向位移的反饋跟蹤控制。通過多次反復(fù)試算,最終確定PID控制器參數(shù)值,即K P取10,K I取0,K D取30。

式中δFB為所需的反饋車輪轉(zhuǎn)角。
綜合前饋控制與反饋控制,本文所提出的車輛轉(zhuǎn)向避撞控制策略的總轉(zhuǎn)向盤轉(zhuǎn)角輸入值為

此外,進(jìn)一步考慮機(jī)械轉(zhuǎn)向系統(tǒng)的局限性,確保所規(guī)劃的參考路徑合理可行,對(duì)轉(zhuǎn)向盤轉(zhuǎn)角及其變化率進(jìn)行了如下約束:

4 算例分析
4.1 車輛模型
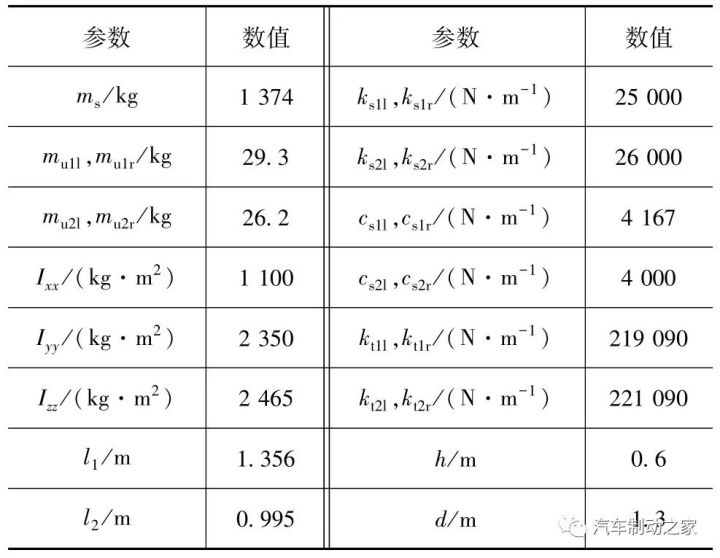
在前文中采用簡(jiǎn)化的車輛質(zhì)點(diǎn)模型分析了轉(zhuǎn)向避撞和制動(dòng)避撞的有效性,為進(jìn)一步研究車輛在轉(zhuǎn)向避撞過程中的實(shí)際響應(yīng),還應(yīng)對(duì)車輛底盤動(dòng)力學(xué)進(jìn)行詳細(xì)建模研究。同時(shí),高速車輛轉(zhuǎn)向避撞往往表現(xiàn)出較強(qiáng)的非線性特性,傳統(tǒng)2自由度線性模型難以滿足要求。本文中所使用的車輛模型為轉(zhuǎn)向和懸架系統(tǒng)相統(tǒng)一的動(dòng)力學(xué)模型,具體建模過程參見文獻(xiàn)[11]。車輛模型主要參數(shù)見表2。其中,m s為簧上質(zhì)量,m u ij為簧下質(zhì)量(i=1,2表示前、后,j=l,r表示左、右,下同),Ixx為簧上質(zhì)量繞車輛坐標(biāo)系x軸的等效轉(zhuǎn)動(dòng)慣量,Iyy為簧上質(zhì)量繞車輛坐標(biāo)系y軸的等效轉(zhuǎn)動(dòng)慣量,Izz為整車?yán)@車輛坐標(biāo)系z(mì)軸的等效轉(zhuǎn)動(dòng)慣量,l1、l2為整車質(zhì)心至前、后軸距離,k s ij為單側(cè)懸架系統(tǒng)等效的垂向剛度,c s ij為單側(cè)懸架系統(tǒng)垂向阻尼,k t ij為單側(cè)輪胎垂直剛度,h為側(cè)傾力臂,d為輪距。
表2 車輛參數(shù)
輪胎模型采用魔術(shù)公式輪胎,其表達(dá)式為

式中:Y(x)代表縱向力、側(cè)向力和回正力矩;B為剛度因子;C為形狀因子;D為峰值因子;E為曲率因子;ΔSv為曲線的垂直方向漂移。
圖9為前輪胎名義側(cè)向力與名義縱向力的關(guān)系曲線。
4.2 避撞場(chǎng)景構(gòu)建與仿真分析
假定車輛以80 km/h車速行駛,在t=0時(shí)刻車輛前方50 m處出現(xiàn)某一靜止障礙物,車輛須進(jìn)行換道操作,換道后車輛保持直線行駛。在t=3 s時(shí)刻出現(xiàn)側(cè)向風(fēng)干擾,側(cè)向風(fēng)幅值為2 000 N。在t=3.75 s時(shí)刻側(cè)向風(fēng)消失。行駛至t=4.5 s時(shí)刻發(fā)現(xiàn)前方50 m處又出現(xiàn)另一靜止障礙物,車輛須再次進(jìn)行換道操作,換道后車輛繼續(xù)保持直線行駛。避撞場(chǎng)景示意如圖10所示。
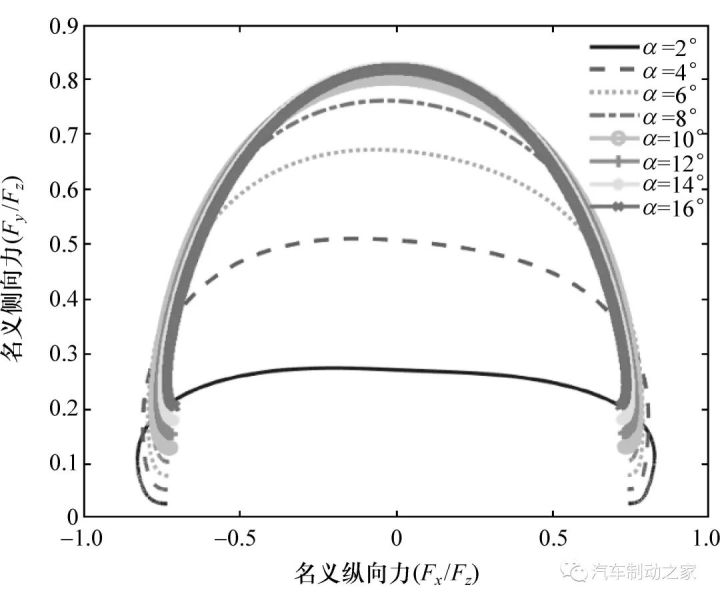
圖9 不同車輪側(cè)偏角下輪胎名義側(cè)向力與名義縱向力的關(guān)系曲線
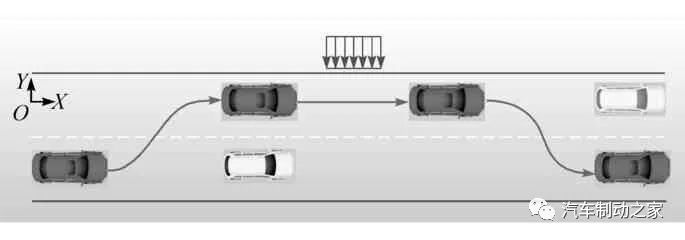
圖10 車輛避撞場(chǎng)景示意
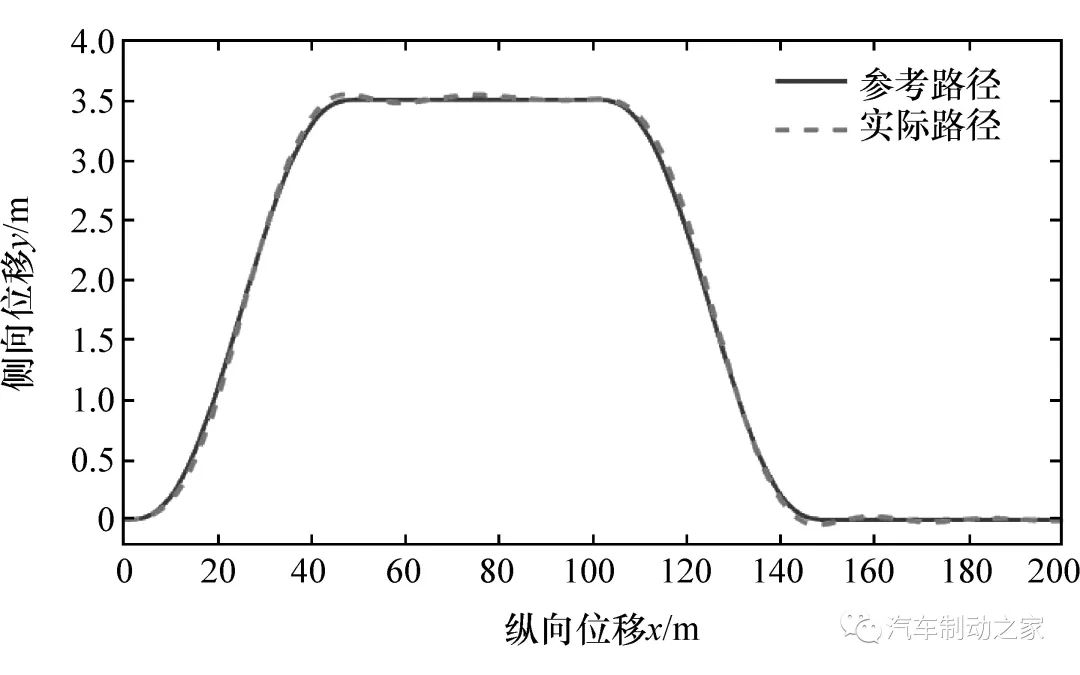
圖11 車輛側(cè)向-縱向位移
采用七次多項(xiàng)式擬合的參考路徑,結(jié)合前饋+反饋的跟蹤控制策略,車輛自動(dòng)緊急轉(zhuǎn)向避撞的響應(yīng)情況如圖11~圖15所示。其中,圖11和圖12為車輛側(cè)向位移和側(cè)向位移跟蹤誤差的響應(yīng)情況。可以看出,受控車輛實(shí)際行駛軌跡與參考路徑基本吻合,側(cè)向位移跟蹤誤差最大為0.02 m,表明所提出的控制算法具有較好的魯棒性和及時(shí)性,能很好地跟蹤預(yù)先給定的參考路徑,并通過轉(zhuǎn)向?qū)崿F(xiàn)有效避撞的目的。
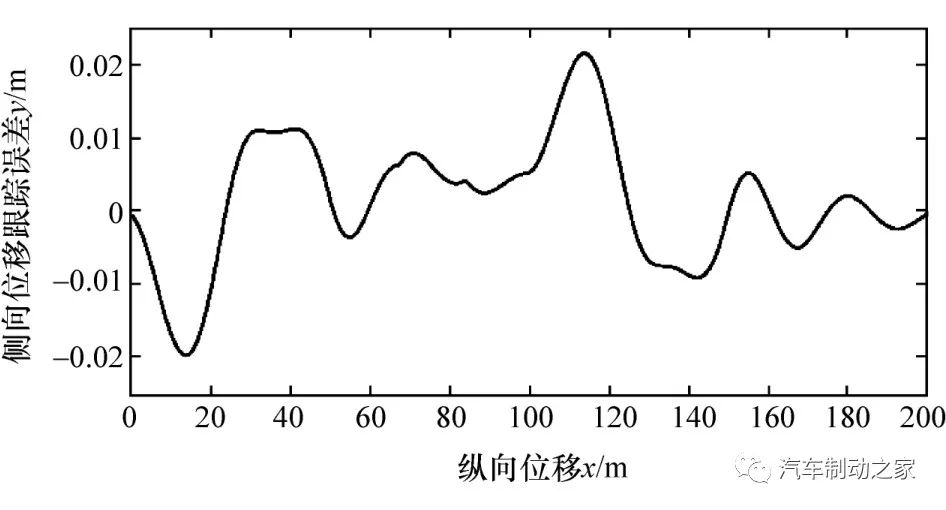
圖12 車輛側(cè)向位移跟蹤誤差
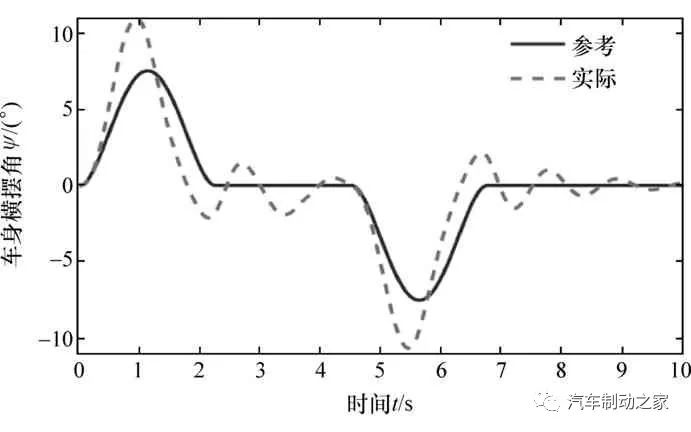
圖13 車輛橫擺角
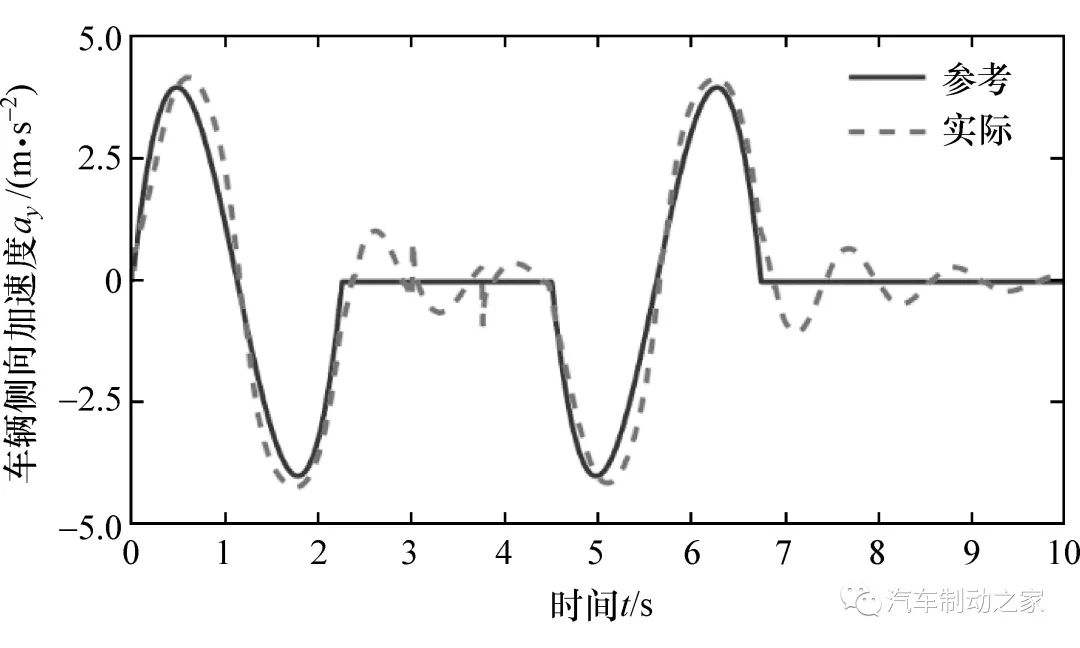
圖14 車輛側(cè)向加速度
從圖13也可看出,實(shí)際車輛的橫擺角響應(yīng)與參考橫擺角的趨勢(shì)基本吻合,與參考橫擺角相比,車輛的實(shí)際橫擺角峰值相對(duì)偏大,并出現(xiàn)一定程度的波動(dòng),這是因?yàn)楸疚闹兴櫟能囕v系統(tǒng)為轉(zhuǎn)向與懸架相統(tǒng)一的非線性車輛模型,車輛系統(tǒng)響應(yīng)具有一定程度的延時(shí)性和瞬態(tài)特性。另外,從圖14可看出,實(shí)際車輛的側(cè)向加速度與參考側(cè)向加速度也基本吻合,由于受側(cè)向風(fēng)干擾影響,實(shí)際車輛在t=3 s和t=3.75 s時(shí)刻的側(cè)向加速度受到一定的沖擊。圖15為實(shí)際車輛車身側(cè)傾角響應(yīng)。可以看出,車輛在轉(zhuǎn)向避撞過程中,車身側(cè)傾角也會(huì)出現(xiàn)一定程度的波動(dòng)。
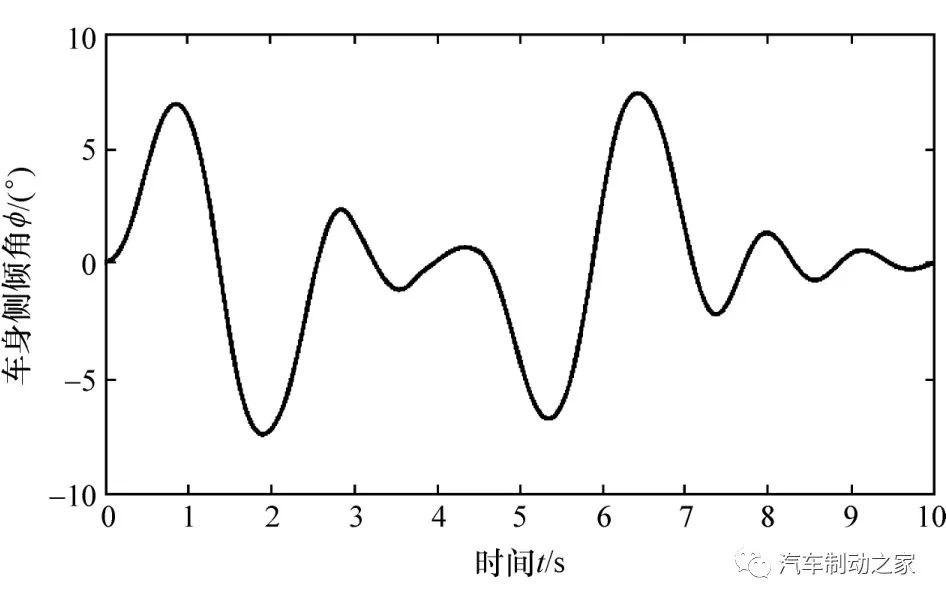
圖15 車身側(cè)傾角
5 結(jié)論
通過建立汽車避撞質(zhì)點(diǎn)模型,對(duì)比分析了制動(dòng)避撞、轉(zhuǎn)向避撞和制動(dòng)與轉(zhuǎn)向聯(lián)合避撞對(duì)車輛最小縱向距離的要求。結(jié)果表明,與制動(dòng)避撞相比,轉(zhuǎn)向避撞對(duì)縱向距離的要求顯著減小,車速越高、路面附著系數(shù)越小,效果越明顯,與制動(dòng)和轉(zhuǎn)向聯(lián)合避撞的效果十分接近。在此基礎(chǔ)上,以轉(zhuǎn)向避撞為手段,選取過渡較為緩和的七次多項(xiàng)式規(guī)劃參考路徑,構(gòu)建了前饋與反饋相結(jié)合的跟蹤控制策略,通過車輛轉(zhuǎn)向與懸架統(tǒng)一動(dòng)力學(xué)模型的避撞仿真試驗(yàn),表明所提出的路徑跟蹤控制算法有效可行,能使車輛合理避撞。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 89



 廣告
廣告 編輯推薦




最新資訊
-
開年豪擲1.8億搶用戶,又一車企加入“價(jià)格
2026-03-04 16:05
-
聯(lián)合國法規(guī)R60對(duì)兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項(xiàng)|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
