




 廣告
廣告





















































越野伸縮臂夾抱機(jī)底盤驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)
2021-09-15 01:13:04· 來(lái)源:焉知智能底盤

TH4008 型越野伸縮臂夾抱機(jī)主要用于圓包物料田間野外的搬運(yùn)作業(yè),需在地形條件極為惡劣的環(huán)境下正常工作,因此,對(duì)底盤的地形適應(yīng)能力和自身驅(qū)動(dòng)能力要求較高。
TH4008 型越野伸縮臂夾抱機(jī)主要用于圓包物料田間野外的搬運(yùn)作業(yè),需在地形條件極為惡劣的環(huán)境下正常工作,因此,對(duì)底盤的地形適應(yīng)能力和自身驅(qū)動(dòng)能力要求較高。夾抱機(jī)底盤要具備四輪驅(qū)動(dòng)、四輪轉(zhuǎn)向、蟹行等多種轉(zhuǎn)向方式以及具備強(qiáng)勁的驅(qū)動(dòng)力才能完成野外作業(yè)。
1 TH4008 型夾抱機(jī)整體結(jié)構(gòu)布置
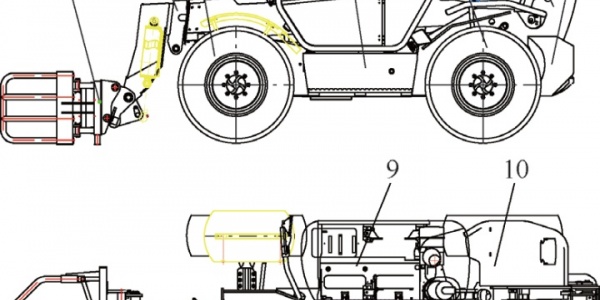
TH4008 型越野伸縮臂夾抱機(jī)整體結(jié)構(gòu)布置采用左右基本對(duì)稱的形式,見圖1。發(fā)動(dòng)機(jī)艙采用獨(dú)立模塊式結(jié)構(gòu),整體布置在整機(jī)的右側(cè),艙內(nèi)布置發(fā)動(dòng)機(jī)、蓄電池及散熱器;液力變矩器、變速箱以及齒輪泵布置在車架中部;駕駛室總成和油箱總成上下布置在整機(jī)的左側(cè);伸縮臂縱向布置在整車中心,位于變速箱上方,其與車架鉸接點(diǎn)位于整車后部,且位置較低,保證了駕駛室具有良好的視野。配重安裝在車架后部,前橋總成與車架剛性聯(lián)接,后橋總成與車架鉸接,整機(jī)結(jié)構(gòu)設(shè)計(jì)緊湊,重心位置較低,穩(wěn)定性好。
發(fā)動(dòng)機(jī)橫向置于整車右側(cè),通過傳動(dòng)軸連接90°角傳動(dòng)箱,角傳動(dòng)箱置于車體中部,向前與變矩器和變速箱直聯(lián),變速箱將動(dòng)力向前和向后分別傳至前后驅(qū)動(dòng)橋,構(gòu)成底盤行走驅(qū)動(dòng)系統(tǒng);角傳動(dòng)箱向后直聯(lián)液壓泵,液壓泵為轉(zhuǎn)向系統(tǒng)、制動(dòng)系統(tǒng)和工作系統(tǒng)提供液壓動(dòng)力。工作系統(tǒng)實(shí)現(xiàn)伸縮臂的伸縮、變幅和抱夾的傾翻、夾抱等動(dòng)作,動(dòng)力傳動(dòng)路線如圖2 所示,底盤驅(qū)動(dòng)系統(tǒng)布置結(jié)構(gòu)如圖3 所示。該方案的優(yōu)點(diǎn)是發(fā)動(dòng)機(jī)橫置,使整機(jī)軸距最短,同時(shí)可提高整機(jī)的靈活性,并且動(dòng)力系統(tǒng)的布置結(jié)構(gòu)緊湊、簡(jiǎn)單,維護(hù)保養(yǎng)較方便。缺點(diǎn)是發(fā)動(dòng)機(jī)需要通過角傳動(dòng)箱與液力變矩器連接,多了一級(jí)傳動(dòng)部件。
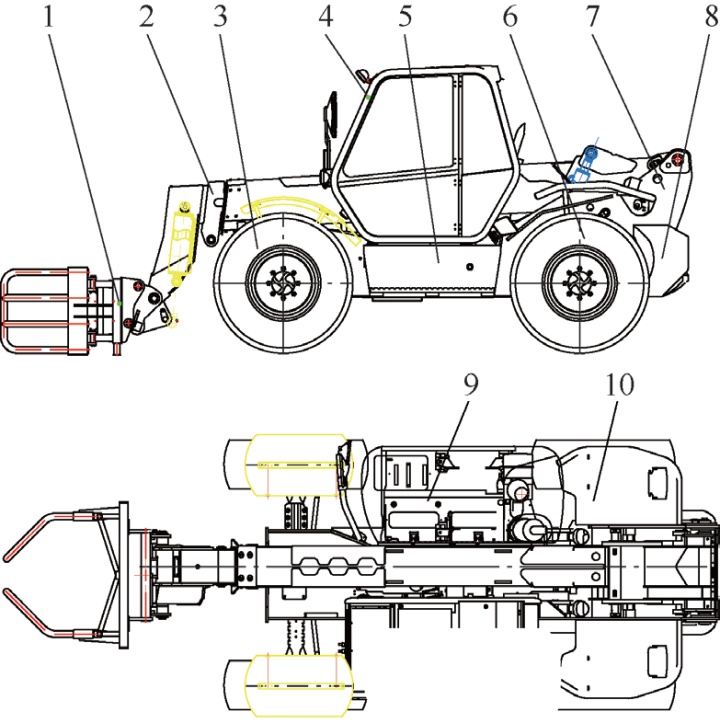
1. 夾抱屬具總成 2. 伸縮臂總成 3. 前橋總成4. 駕駛室總成 5. 油箱總成 6. 后橋總成7. 車架總成 8. 配重 9. 動(dòng)力艙總成 10. 車罩總成
圖1 TH4008 型越野伸縮臂夾抱機(jī)整體布置圖

圖2 動(dòng)力傳動(dòng)路線圖
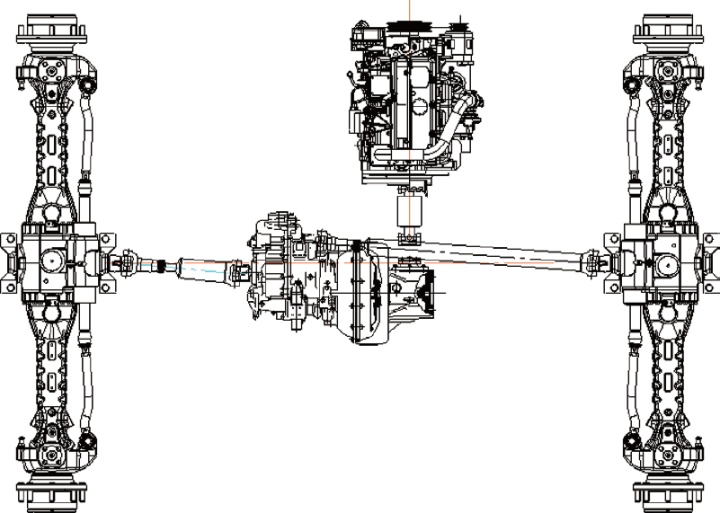
圖3 底盤驅(qū)動(dòng)系統(tǒng)結(jié)構(gòu)布置圖
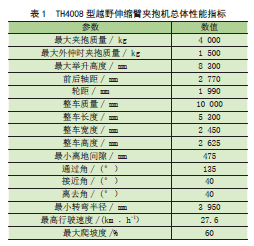
TH4008 型越野伸縮臂夾抱機(jī)主要技術(shù)參數(shù)如表1所示。
2 底盤驅(qū)動(dòng)系統(tǒng)零部件選型
2.1 動(dòng)力參數(shù)計(jì)算
2.1.1 驅(qū)動(dòng)力計(jì)算
根據(jù)TH4008 型越野伸縮臂夾抱機(jī)設(shè)計(jì)指標(biāo),夾抱機(jī)自重為M C,最大工作負(fù)載質(zhì)量為M f,應(yīng)能在坡度為60% 的坡道上滿載起步和行駛。附著系數(shù)μ = 0.8 , 起步阻力系數(shù)α =0.04,行使阻力系數(shù)(混凝土路面) β=0.02 。
夾抱機(jī)在滿載和空駛狀態(tài)所需牽引力和附著力可按以下幾種狀態(tài)計(jì)算:
1) 伸縮臂夾抱機(jī)和負(fù)載在60% 的坡道上起步所需的最大牽引力( 1 γ 為坡度系數(shù))
伸縮臂夾抱機(jī)和負(fù)載在坡道上能發(fā)揮的最大附著力( 2 γ 為坡度系數(shù))

伸縮臂夾抱機(jī)有足夠的附著力。
2) 伸縮臂夾抱機(jī)在水平路面上勻速行駛時(shí)的阻力

伸縮臂夾抱機(jī)在水平路面上能發(fā)揮的最大附著力

伸縮臂夾抱機(jī)有足夠的附著力。
2.1.2 牽引力與爬坡度的計(jì)算
1) 空載牽引力的計(jì)算
式中:e M 為發(fā)動(dòng)機(jī)最大輸出扭矩, 1 i 為變速器一擋速比, 0 i 為前后橋速比, k 為變矩器變矩系數(shù),η 為傳遞效率,R 為輪胎工作半徑。
2) 額定負(fù)載牽引力的計(jì)算
式中:F 為空載牽引力,G 1 為額定負(fù)載時(shí)的整機(jī)質(zhì)量,G 為空載時(shí)的整機(jī)質(zhì)量。
3) 最大爬坡度的計(jì)算

式中:F 為額定負(fù)載牽引力;G 為額定負(fù)載時(shí)的整機(jī)質(zhì)量;β 為行駛阻力系數(shù)。
以上是在額定負(fù)載時(shí)伸縮臂夾抱機(jī)的最大爬坡度。
2.2 發(fā)動(dòng)機(jī)選型
1)行走驅(qū)動(dòng)功率計(jì)算
行走驅(qū)動(dòng)最大功率發(fā)生在滿載時(shí)在最大坡度上勻速行駛時(shí),伸縮臂夾抱機(jī)在60% 坡度上滿載以最高2 km/h 速度行駛時(shí)伸縮臂夾抱機(jī)所發(fā)揮的驅(qū)動(dòng)力為F Tmax,行走驅(qū)動(dòng)功率

2)總功率計(jì)算
伸縮臂夾抱機(jī)發(fā)動(dòng)機(jī)總功率N e 等于行走驅(qū)動(dòng)功率、液壓系統(tǒng)功率及附件功率(發(fā)電機(jī)、風(fēng)扇、等消耗的功率)之和,即

式中: q N 為行走驅(qū)動(dòng)功率, p N 為液壓系統(tǒng)功率, c N為附件功率。
由于伸縮臂夾抱機(jī)行駛過程中不允許操作工作裝置,故在估算發(fā)動(dòng)機(jī)功率時(shí),可僅考慮行走驅(qū)動(dòng)功率qmax N 。附件功率c N 可用有用功率的一個(gè)百分?jǐn)?shù)表示(對(duì)于DIN 制功率可取為7%)??捎孟率焦浪惆l(fā)動(dòng)機(jī)功率
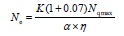
式中: K 為發(fā)動(dòng)機(jī)功率貯備系數(shù);α 為發(fā)動(dòng)機(jī)的負(fù)荷系數(shù),對(duì)于與發(fā)動(dòng)機(jī)匹配良好的驅(qū)動(dòng)系統(tǒng),取α = 0.9;η 為傳動(dòng)系統(tǒng)總效率,取η = 0.8。
將以上數(shù)據(jù)代入上式計(jì)算發(fā)動(dòng)機(jī)功率,得到整車最大需求動(dòng)力,可選擇75 kW 左右的發(fā)動(dòng)機(jī)。
2.3 輪載分配與輪胎選型
1) 輪載分配
伸縮臂夾抱機(jī)在靜止?fàn)顟B(tài)下空載時(shí),整備質(zhì)量10 000 kg,前橋承載3 700 kg,后橋承載6 300 kg;額定負(fù)載下整備質(zhì)量14 000 kg,前橋承載12 240 kg,后橋承載1 760 kg。所以輪胎的靜止最大承受負(fù)載為6120 kg.
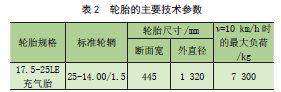
2) 輪胎選型
按GB1190—1991《工程機(jī)械輪胎》的規(guī)定和計(jì)算得到的輪載分配和高性價(jià)比的原則,選用國(guó)內(nèi)工程車常用輪胎,考慮車的越野性,離地間隙不能小于450mm,考慮整車的工況要求,選用規(guī)格為17.5-25(16 層級(jí)、L-2E 花紋) 的輪胎。輪胎的主要技術(shù)參數(shù)見表2。
2.4 驅(qū)動(dòng)橋的選擇
當(dāng)夾抱機(jī)空載時(shí)整備質(zhì)量10 000 kg,此時(shí)前軸承載3 700 kg,后軸承載6 300 kg;當(dāng)夾抱機(jī)加裝額定負(fù)載時(shí)整備質(zhì)量14 000 kg,此時(shí)前軸承載12 240 kg,后軸承載1 760 kg。所以本車選用驅(qū)動(dòng)轉(zhuǎn)向橋,承載能力16 t 以上,前后橋均采用油浸式多剎車片結(jié)構(gòu),前橋帶拉線式駐車制動(dòng),帶有中間減速器與輪邊行星減速,主減速器傳動(dòng)比為11:35,輪邊減速傳動(dòng)比為1 ∶ 6,總傳動(dòng)比為1 ∶ 19.09。
2.5 變速箱選型及速度計(jì)算
液力變矩器及變速箱選型考慮結(jié)構(gòu)簡(jiǎn)單、工作可靠、質(zhì)量輕、尺寸緊湊以及效率高和適合本機(jī)變矩性能要求,變速箱動(dòng)力與機(jī)械換擋相結(jié)合,4 個(gè)前進(jìn)擋,4 個(gè)后退擋,各擋位前進(jìn)速比為i 1=4.8、i 2=2.9、i 3=1.4、i 4=0.8,后退速比為 i 1=4.8、i 2=2.9、i 3=1.4、i 4=0.8,有
式中:T v 為車輛理論行駛速度,km/h;e n 為發(fā)動(dòng)機(jī)轉(zhuǎn)速;K r 為驅(qū)動(dòng)輪動(dòng)力半徑;a i 為變速箱各擋位速比;b i 為前、后橋速比。
計(jì)算得到各前進(jìn)擋速度:v 1 =4.5 km/h, v 2=7.3 km/h,v 3=15.3 km/h, v 4= 27.6 km/h;后退各擋的速比與前進(jìn)擋相同,即后退各擋的速度與前進(jìn)各擋的速度相對(duì)應(yīng)。
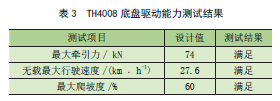
3 底盤驅(qū)動(dòng)性能試驗(yàn)
TH4008 型越野伸縮臂夾抱機(jī)樣機(jī)研制完成后,對(duì)底盤驅(qū)動(dòng)性能進(jìn)行了試驗(yàn)測(cè)試,試驗(yàn)結(jié)果如表3 所示。樣機(jī)試驗(yàn)、樣機(jī)作業(yè)如圖4、圖5 所示。

圖4 樣機(jī)試驗(yàn)

圖5 樣機(jī)作業(yè)
4 結(jié)語(yǔ)
論述了TH4008 伸縮臂夾抱機(jī)總體設(shè)計(jì)及性能參數(shù)計(jì)算過程,介紹了其整體結(jié)構(gòu)布置、主要技術(shù)參數(shù)以及動(dòng)力傳動(dòng)路線;對(duì)主要零部件發(fā)動(dòng)機(jī)、車橋、變矩器及變速箱、輪胎等進(jìn)行了選型。試驗(yàn)驗(yàn)證證明,選型滿足系統(tǒng)設(shè)計(jì)要求。對(duì)未來(lái)相關(guān)車型的底盤設(shè)計(jì)和優(yōu)化提供了重要的參考。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 66



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
