




 廣告
廣告





















































自動駕駛攝像頭的基本工作原理
2021-09-15 15:15:48· 來源:自動駕駛攻城獅 作者:青驥子

對比Radar、Lidar、Sonar來講,Camera最接近人眼識別原理,在自動駕駛傳感器中擔(dān)任重要角色,尤其自動駕駛領(lǐng)頭羊特斯拉力推純視覺方案,行業(yè)內(nèi)紛紛加注攝像頭,
對比Radar、Lidar、Sonar來講,Camera最接近人眼識別原理,在自動駕駛傳感器中擔(dān)任重要角色,尤其自動駕駛領(lǐng)頭羊特斯拉力推純視覺方案,行業(yè)內(nèi)紛紛加注攝像頭,攝像頭的平均單車使用量逐年上升。
本文就來挖一挖自動駕駛攝像頭的基本知識。
攝像頭分類:
按照安裝位置不同可分為,前視攝像頭、后視攝像頭、側(cè)面攝像頭、全景攝像頭、DMS攝像頭等
按照鏡頭數(shù)可分為單目、雙目、三目等
按照FOV角度可分為廣角、魚眼攝像頭等
攝像頭的組成:Lens(鏡頭)+Image Sensor(CMOS/CCD)+電源PCB+殼體/支架/密封膠水,還有些攝像頭是集成ISP(圖像信號處理器Image Signal Processor)的,不過有些不帶ISP,如下圖所示一個帶ISP一個不帶。
基本工作原理:
Lens負(fù)責(zé)光學(xué)取景,將物理世界由透鏡投射到Image Sensor,產(chǎn)生電壓差,將電壓差通過AD轉(zhuǎn)換后給ISP進(jìn)行灰度補(bǔ)償、色彩差值、平滑處理、色彩校正等,然后將圖像傳遞從Raw DATA格式轉(zhuǎn)換成RGB格式或者是YUV格式輸出到相機(jī)外部(控制器),控制器通過神經(jīng)網(wǎng)絡(luò)算法來處理攝像頭感知數(shù)據(jù),從而完成視覺的感知和識別結(jié)果輸出。

關(guān)鍵性能參數(shù)
1-像素Resolution,越大越高清
2-分辨率,分辨率使用于度量圖像內(nèi)數(shù)據(jù)量多少的一個參數(shù),表示成dpi(每英寸點或像素數(shù)),基本由Iamge Sensor決定,Image sensor尺寸越大像素越多,圖像越清晰
3-色域,RGB24和I420(YUV)兩種圖像格式最為常用
4-FOV,可支持的視角范圍
5-幀率,即每秒顯示的圖像數(shù)
6-Dynamic Range

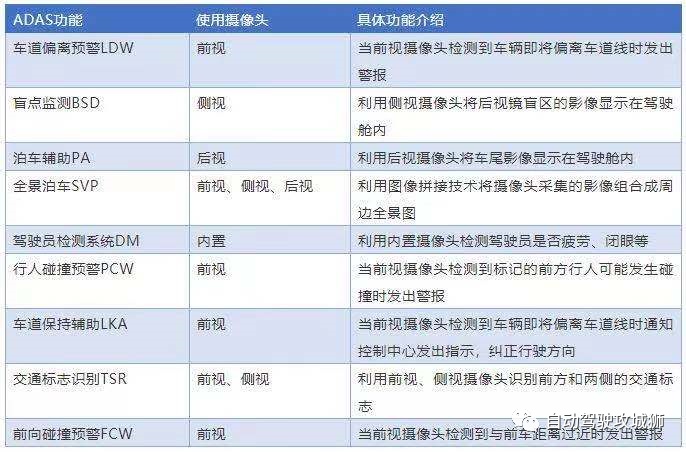
自動駕駛功能的攝像頭使用分配
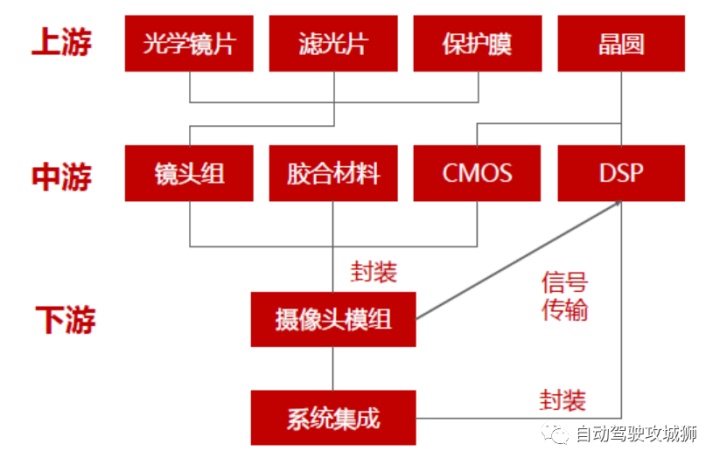
攝像頭的產(chǎn)業(yè)鏈



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
