




 廣告
廣告





















































新型高效的懸架架構(gòu)設(shè)計方法——長安汽車
2021-09-22 22:43:16· 來源:ATC汽車底盤

摘要:傳統(tǒng)的懸架架構(gòu)設(shè)計方法使用多體動力學(xué)仿真進行大量試錯,因此對時間及人力需求 高,但效果不穩(wěn)定。針對該問題建立的新方法首先應(yīng)用新型解析算法設(shè)計懸架硬點
摘要:傳統(tǒng)的懸架架構(gòu)設(shè)計方法使用多體動力學(xué)仿真進行大量試錯,因此對時間及人力需求 高,但效果不穩(wěn)定。針對該問題建立的新方法首先應(yīng)用新型解析算法設(shè)計懸架硬點,再應(yīng)用基于ADAMS及MATLAB二次開發(fā)的自動化軟件設(shè)計彈性件。相比傳統(tǒng)方法,新方法效率提升約8倍。新方法還包含一套性能參數(shù)管控標(biāo)準(zhǔn),能系統(tǒng)性地判斷135項懸架運動學(xué)及整車動力學(xué)性能 參數(shù)的優(yōu)劣,以此指導(dǎo)設(shè)計。相比傳統(tǒng)方法依靠設(shè)計人員經(jīng)驗判斷參數(shù)優(yōu)劣,新方法更全面、精準(zhǔn) 和穩(wěn)定,更能確保設(shè)計質(zhì)量。
懸架架構(gòu)設(shè)計是指通過設(shè)定硬點的位置及關(guān)鍵彈性件的性能參數(shù),如彈簧、減震器、緩沖塊、襯套,使懸 架的剛性及彈性運動學(xué)性能(K&C:kinematics and compliances)達到目標(biāo);除此以外還需分析該架構(gòu)方案是否有潛力在完成性能匹配后達成整車的乘坐及操控性能目標(biāo)。傳統(tǒng)的懸架架構(gòu)設(shè)計方法應(yīng)用動力學(xué)仿真軟件,通常是 ADAMS,建立懸架和整車模型并計算懸架K&C和整車乘坐及操縱性能設(shè) 計人員借助ADAMS仿真試錯各種硬點布置及彈性件參數(shù),找出一個合適的方案。傳統(tǒng)方法在工程實踐中暴露出2個問題。第1是速度慢。
以長安汽車為例,首輪懸架架構(gòu)分析包含 ADAMS 建模、仿真、結(jié)果后處理、結(jié)果分析及報告制作等多項工作,它需要兩位熟練工程師共同工作近 10個工作日,后續(xù)還需要5至10輪優(yōu)化,每輪需要約2個工作日,所需的時間及人力消耗很大。在懸架設(shè)計后 期,由于零部件布置及結(jié)構(gòu)剛強度等限制,前期擬定的架構(gòu)方案還將反復(fù)修改,進一步消耗時間及人力。第2是設(shè)計人員難以判斷懸架架構(gòu)的總體性能優(yōu)劣。ADAMS 仿真輸出的懸架K&C和整車乘坐及操控性能結(jié) 果包含數(shù)百項參數(shù),多數(shù)參數(shù)以曲線圖形式呈現(xiàn)。設(shè)計人員需要豐富的經(jīng)驗才能通過這些龐雜的圖表判斷 出架構(gòu)方案的總體性能水平。該問題在方案優(yōu)化過程中表現(xiàn)得極為突出,對一個或幾個目標(biāo)參數(shù)的優(yōu)化常 會劣化其他的參數(shù),而這種負(fù)面交互作用經(jīng)常被掩蓋在大量的圖表中而未被識別出來,造成性能隱患和設(shè)計反復(fù)。當(dāng)下汽車市場競爭激烈,對產(chǎn)品更新速度和產(chǎn)品力的要求越來越高,底盤研發(fā)人員亟須一種新的設(shè)計方 法,以提升懸架架構(gòu)設(shè)計的速度和質(zhì)量。
1、 長安汽車懸架架構(gòu)設(shè)計新方法
為解決上述問題,長安汽車構(gòu)建了一套新型高效的懸架架構(gòu)設(shè)計方法。
它包含 3 個模塊:
1)硬點設(shè)計模 塊;
2)彈性件設(shè)計模塊
;3)底盤性能參數(shù)管控標(biāo)準(zhǔn)。
硬點設(shè)計模塊采用新型的懸架運動學(xué)實時算法,并將該 算法程序化為“長安汽車懸架設(shè)計輔助軟件(CA-SD)”。該軟件僅需懸架硬點而無須其他任何彈性件及結(jié)構(gòu) 件信息,便可在數(shù)毫秒內(nèi)精準(zhǔn)算出懸架方案的剛性運動學(xué)性能。彈性件設(shè)計模塊集成現(xiàn)有的車輛動力學(xué)仿 真軟件 ADAMS 和數(shù)據(jù)處理軟件 MATLAB,并基于它們進行二次開發(fā),拓展為“長安汽車動力學(xué)自動分析 軟件(CA-AutoKC)”。該軟件僅需“填表式”操作,即可自動建立懸架及整車多體動力學(xué)模型、運行典型工況 仿真并進行結(jié)果后處理。性能參數(shù)管控標(biāo)準(zhǔn)是新方法的核心,它內(nèi)嵌在上述兩個軟件中,用以評判方案的性 能水平。該標(biāo)準(zhǔn)通過對底盤性能經(jīng)典理論、對標(biāo)數(shù)據(jù)庫及應(yīng)規(guī)避問題數(shù)據(jù)庫的挖掘及提煉,探明了性能參數(shù) 的重要度、關(guān)聯(lián)性及合理取值范圍。
利用該標(biāo)準(zhǔn)可將傳統(tǒng)方法中龐雜的性能參數(shù)曲線圖轉(zhuǎn)化為簡潔的數(shù)值報告,并以優(yōu)、良、差3個等級直觀地標(biāo)定出135項重要性能參數(shù)的水平。硬點設(shè)計模塊和彈性件設(shè)計模塊 解決了傳統(tǒng)方法速度慢的問題,性能參數(shù)管控標(biāo)準(zhǔn)解決了傳統(tǒng)方法設(shè)計質(zhì)量不穩(wěn)定的問題。利用新方法,即 便是缺乏動力學(xué)仿真基礎(chǔ)及底盤開發(fā)經(jīng)驗的人員也能在短時間內(nèi)正確地搭建、判斷和優(yōu)化方案,極大提升了 懸架架構(gòu)設(shè)計的速度和質(zhì)量。長安汽車懸架架構(gòu)設(shè)計方法屬于應(yīng)用創(chuàng)新,它以汽車底盤開發(fā)一線的問題和需求為牽引,通過應(yīng)用新理論、集成現(xiàn)有技術(shù),解決研發(fā)實踐中的瓶頸問題。
在創(chuàng)新難度上,新方法的 3 個模塊(CA-SD、CA-AutoKC、 底盤性能參數(shù)管控標(biāo)準(zhǔn))技術(shù)集成性及復(fù)雜性高,依托5位專職人員及若干協(xié)同人員耗時2a建成。在先進性上,新方法屬國內(nèi)首創(chuàng)、國際領(lǐng)先水平。在經(jīng)濟貢獻上,新方法首先極大提高了設(shè)計效率。它將首輪方案設(shè)計的耗時從傳統(tǒng)方法的2名工程師1 0個工作日壓縮到1名工程師約2.5個工作日,速度提升約8倍;為長安汽車縮減3名動力學(xué)仿真工程師崗位,每年節(jié)省人力成本約70萬元。新方法還能規(guī)避性能參數(shù)誤判、漏判的情況,顯著提高產(chǎn)品質(zhì)量。長安歐尚X7為首款采用新方法設(shè)計的車型,其底盤舒適性及操穩(wěn)性在汽車 之家同級車系對比口碑排行中均高居第2名,助推X7上市即爆款,月銷超萬輛,帶來了數(shù)以億元計的經(jīng)濟效益。
2 硬點設(shè)計模塊
2.1 硬點設(shè)計的原理與基礎(chǔ)理論
硬點設(shè)計模塊的原理是實時的懸架運動學(xué)解析算法。從20世紀(jì)70年代起,底盤工程師就嘗試通過硬 點位置來實時計算懸架的復(fù)雜運動,該設(shè)想在過去幾年取得巨大的進展,絕大多數(shù)主流懸架類型的全部 剛性運動學(xué)性能和部分彈性運動學(xué)性能都可以通過硬點構(gòu)筑的方程組快速、精確求解。下文以五連桿后 懸的車輪跳動為例簡述其計算原理。如圖 1 所示為五連桿懸架運動機構(gòu)簡圖,它在某個狀態(tài)下(如靜載狀態(tài))的所有硬點位置都已知。解析 算法從計算輪心 w 的瞬時速度著手,它包含輪心的線速度v w 及角速度ωw 2 個三維向量,共 6 個標(biāo)量,即 (v w ,ωw ) = v wx ,v wy ,v wz ,ωwx ,ωwy ,ωwz ( ) 。(1) 為求解這 6 個未知標(biāo)量,需要構(gòu)筑 6 個方程。
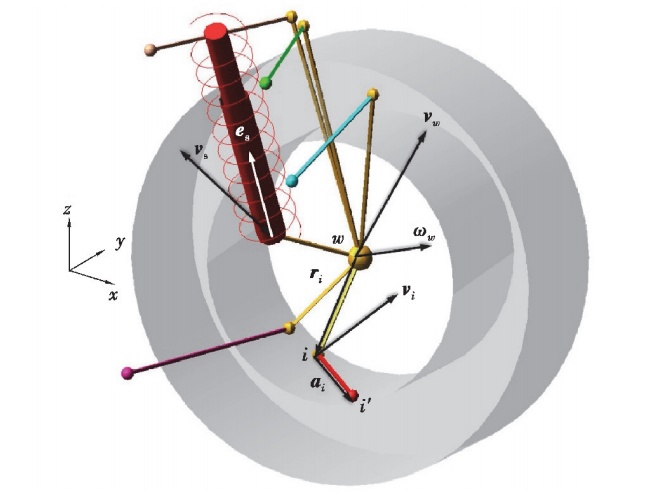
圖 1 五連桿懸架中硬點的速度狀態(tài)
懸架羊角剛度極大,因此可以理想化為剛體。所有懸架連桿的外側(cè)球頭及襯套都連接在羊角上,因此這 些連桿外側(cè)點都可以視為羊角上的點,它們的運動與羊角運動相同。進一步把車輪除滾動外的運動抽象為 輪心的運動,它也與羊角運動一致。運動學(xué)中有下述定理:已知剛體上任意一點的瞬時線速度和角速度,可 以求出該剛體上任意點的瞬時速度。因此可以通過輪心點的 6 個速度分量推導(dǎo)出 5 根連桿的外側(cè)點的線速度v i ,即
v i =v w +ωw ×r i ,(2)
式中:下標(biāo) i 取值 1 到 5,分別表示 5 根連桿;r i 指從輪心指向連桿外側(cè)點的位置向量。計算懸架剛性運動學(xué) 性能時,所有的連桿都視為剛體,即連桿的不可伸縮,該特性可表達為
v i ·a i =v'i ·a i ,(3)
式中:v'i 指連桿內(nèi)側(cè)點的線速度;a i 指從連桿外側(cè)點指向內(nèi)側(cè)點的位置向量。該公式表示同一根連桿的內(nèi)側(cè) 和外側(cè)點的瞬時速度在連桿方向上的投影是相等的,即連桿在運動中的長度恒定不變。更進一步假設(shè)車身 不動,即連桿的內(nèi)側(cè)點不動
v'i =0。(4)
將式(2)(3)(4)合并得到
v w +ωw ×r i ( )·a i =0, (5)
式(5)僅包含輪心的線速度和角速度共 6 個未知量,其中的位置向量r i 及a i 都已知,可通過硬點得到。五連桿懸架中的 5 根連桿提供 5 個如式(5)所示的結(jié)構(gòu)相似的方程,為解出式(1)中的 6 個未知標(biāo)量還 需要一個方程,該方程由彈簧提供,
即 (v w +ωw ×r s )·e s =v s。(6)
式(6)與前述 5 個方程的不同之處在于彈簧的長度是變化的。定義彈簧的伸縮速度為標(biāo)量v s,它的值可以人 為設(shè)定,其大小只影響懸架跳動的快慢,并不影響懸架運動的軌跡。v s 在數(shù)學(xué)上等于彈簧下點的線速度向量 v s在彈簧的單位方向向量e s上的投影。至此得到的 6 個方程構(gòu)建起一個有唯一解的線性方程組。為方便電腦求解,它可表示為矩陣乘法形式
A ·x =b , (7)
其中 x 包含輪心的瞬時角速度和線速度 6 個未知量,即
x = v wx ,v wy ,v wz ,ωwx ,ωwy ,ωwz ( ) T,
A 是 6×6 的系數(shù)矩陣,它的所有元素都能通過已知的硬點位置得到
A = A 11 … A 1 6 ? ? A 6 1 … A 6 6 æèççç öø÷÷÷ 。b
為常數(shù)項向量,它包含已知的彈簧硬點信息及預(yù)設(shè)的彈簧伸縮速度,即 b = 0,0,0,0,0,v s· e s ( ) 。
圖 2 總結(jié)了解析計算懸架剛性運動學(xué)的整個流程。第 1 步,通過任意一個狀態(tài)的硬點信息構(gòu)筑式(7)所 示的方程組,并求解出該狀態(tài)下輪心的瞬時速度。第 2 步,利用已知的輪心瞬時速度和式(2)求出其他硬點的瞬時速度。第 3 步,將所有硬點的瞬時速度乘以一個微小的時間增量得出該時間增量內(nèi)硬點的位移,再加上原狀態(tài)的硬點位置,就得出了新狀態(tài)的硬點位置。將這個過程進行多次循環(huán),可以得出懸架在所有狀態(tài)的 硬點位置,即懸架的運動軌跡。利用這些硬點信息,可以求出所有懸架剛體運動學(xué)參數(shù)。該解析計算法有著極高的精度,其結(jié)果與 ADMAS 仿真結(jié)果相比偏差小于2%。由于該方法的計算量小,使用普通辦公電腦 也能在數(shù)毫秒內(nèi)完成運算。
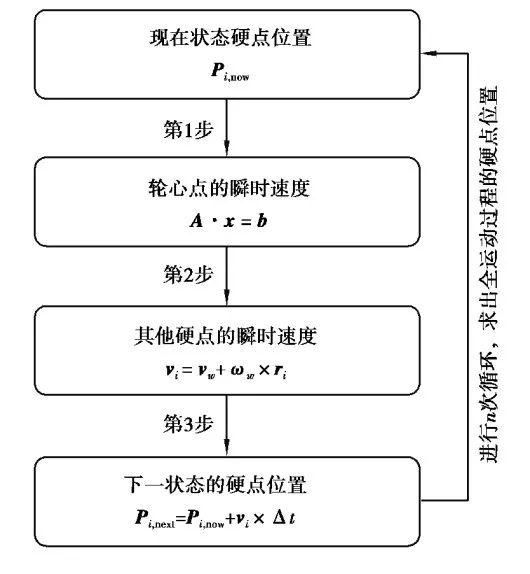
圖 2 懸架運動學(xué)的解析計算流程
2.2 硬點設(shè)計的程序與應(yīng)用
上述解析算法已被部分國際領(lǐng)先的主機廠及零部件商程序化并應(yīng)用,如采埃孚搭建 AKSIS軟件輔助設(shè) 計雙橫臂前懸架及五連桿后懸架[8],FLB 搭建 FASTCON 軟件輔助設(shè)計扭力梁后軸。長安汽車兩年來逐步消化、擴展并應(yīng)用新算法,搭建出擁有自主知識產(chǎn)權(quán)的“長安汽車懸架設(shè)計輔助軟件(CA-SD)”。對比 AKSIS 及FASTCON,CA-SD 不僅可處理雙橫臂前懸架、五連桿后懸架和扭力梁后軸,還能計算中國市場上最為常見的麥佛遜前懸架及刀鋒臂四連桿后懸架。圖3為 CA-SD 麥佛遜前懸架硬點設(shè)計模塊的使用界面。設(shè)計人員在左側(cè)“填表式”輸入初始方案并運行計算,程序?qū)崟r算出它的剛性運動學(xué)性能并將重要的參數(shù)顯示在右側(cè)表格里。
性能數(shù)值后有 3 種顏色 的指示燈,綠色表示性能優(yōu)秀;黃色表示合格,可酌情優(yōu)化也可保留現(xiàn)狀;紅色表示不合格,必須優(yōu)化。指示燈背后的判定邏輯即性能參數(shù)管控標(biāo)準(zhǔn)將在后文詳細(xì)闡述。借助這套指示燈,設(shè)計人員可以快速判斷方案 的質(zhì)量并確定優(yōu)化目標(biāo),通過對初始輸入進行修改,在極短的時間內(nèi)大量試錯,最終找到一個優(yōu)秀的方案(即無紅色項且絕大多數(shù)參數(shù)為綠色項)。如圖 3 中的示例,通過對初始方案的 5 處修改,見圖中左側(cè)紅色框格, 最終的方案成功規(guī)避掉了所有紅燈問題。CA-SD 還能在數(shù)秒內(nèi)自動生成更詳細(xì)的報告,它包含性能參數(shù)的 曲線圖,如圖 4 所示例的輪跳前束角圖。借助該報告,設(shè)計人員能更全面地評估方案,特別是識別和觀察非 線性程度高的參數(shù),做出更精準(zhǔn)的判斷。

圖 3 硬點設(shè)計模塊(CASD),麥佛遜前懸架設(shè)計示例
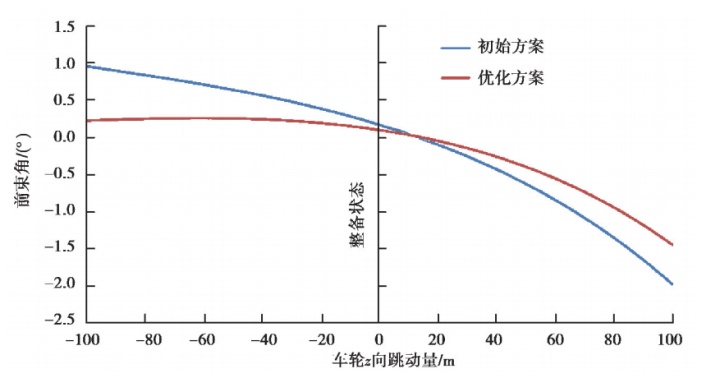
圖 4 CA-SD 性能曲線示例
3 彈性件設(shè)計模塊
利用硬點設(shè)計模塊確定好硬點布置后,懸架的結(jié)構(gòu)件如連桿、羊角及副車架等就可以按流程啟動設(shè)計; 與此同時,為達成懸架彈性運動學(xué)性能和整車乘坐舒適及操控穩(wěn)定性能,也應(yīng)啟動底盤彈性件的設(shè)計。傳統(tǒng) 的底盤彈性件設(shè)計需要大量的人力物力及時間進行 ADAMS 建模、仿真、結(jié)果后處理等工作。由于彈性件和 底盤性能之間的定量關(guān)聯(lián)在理論上仍未研究透徹,因此還無法建立精準(zhǔn)快速的數(shù)學(xué)表達進行求解。新方法 仍需使用仿真軟件,但基于 ADAMS 及 MATLAB進行二次開發(fā),集成為“長安汽車動力學(xué)自動分析軟件 (CA-AutoKC)”。
該軟件將傳統(tǒng)上需要專業(yè) CAE 技能的建模仿真工作轉(zhuǎn)變?yōu)?ldquo;傻瓜”式填表操作,并將煩瑣 的、易出錯的數(shù)據(jù)后處理及報告制作工作轉(zhuǎn)變?yōu)樽詣踊暮笈_過程。圖 5 所示為CA-AutoKC 搭建整車模型的界面。它需要的輸入信息有: •硬點設(shè)計模塊已確定好的硬點信息。•載荷、質(zhì)心、簧上質(zhì)量、簧下質(zhì)量、輪軸距等整車信息。•彈簧、穩(wěn)定桿、減震器、襯套、緩沖塊等彈性件的性能特性曲線。
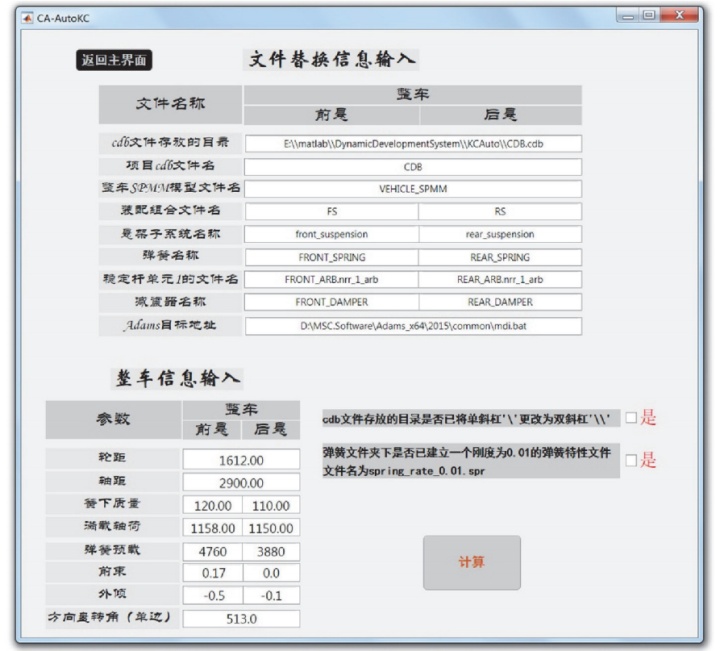
圖 5 彈性件設(shè)計模塊(CA-AutoKC),模型搭建界面
借助這些輸入,CA-AutoKC 控制 ADAMS 建立模型并運行懸架仿真(運動加載、力加載等)和整車仿真 (直線加減速、穩(wěn)態(tài)定圓、正弦掃頻等)。完成仿真后,CA-AutoKC 控制 MATLAB進行數(shù)據(jù)后處理,并利用 內(nèi)嵌的性能參數(shù)管控標(biāo)準(zhǔn)判定各項性能參數(shù)優(yōu)劣并輸出易于閱讀理解的EXCEL報告。圖6為CA-AutoKC 輸出的某車型報告局部,它示例了14項與操穩(wěn)性能相關(guān)的后懸參數(shù),數(shù)值欄的顏色與 CA-SD(圖 3)中意義相同。由于涉及企業(yè)機密,這里無法展示所有參數(shù),但后文給出了性能管控標(biāo)準(zhǔn)的建立方法,讀者可參考其 建立適合自身的標(biāo)準(zhǔn),打造自有車型的性能 DNA。
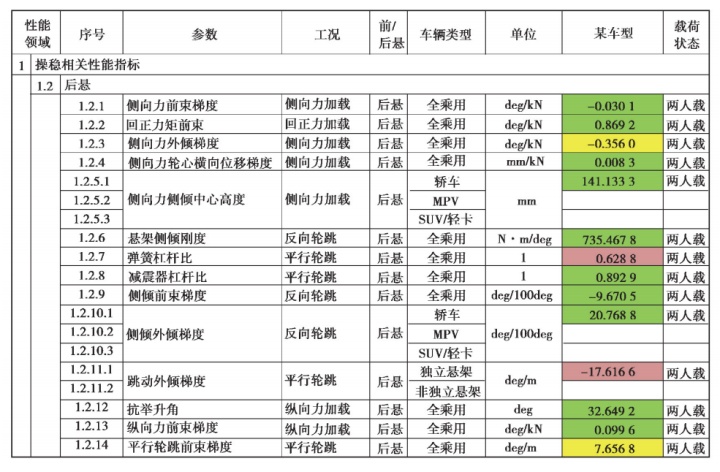
圖 6 CA-AutoKC 報告局部
4 底盤性能參數(shù)管控標(biāo)準(zhǔn)
硬點設(shè)計模塊和彈性件設(shè)計模塊提升設(shè)計效率,底盤性能參數(shù)管控標(biāo)準(zhǔn)則提升設(shè)計質(zhì)量。該標(biāo)準(zhǔn)主要有 3 方面的創(chuàng)新。第1是挑選出重要度高的底盤性能參數(shù)。傳統(tǒng)的底盤性能參數(shù)數(shù)量眾多,如長安汽車原 有的懸架K&C及整車底盤性能報告共包含400多幅圖表,其中許多參數(shù)重要度低,在實際設(shè)計中極少考察。管控標(biāo)準(zhǔn)對眾多參數(shù)進行了系統(tǒng)的梳理,挑選出135項重要的常用參數(shù)進行管控,降低了方案評估的工作量。
第2是將性能參數(shù)按作用領(lǐng)域劃分為操控穩(wěn)定性、乘坐舒適性、四輪定位及轉(zhuǎn)向性3類。圖6示例中列舉了14項與操控穩(wěn)定性強相關(guān)的后懸架 K&C 參數(shù)。這種劃分實現(xiàn)了定性但不定量的主客觀性能初步結(jié)合。第3是將傳統(tǒng)的性能曲線數(shù)值化(取特定點的數(shù)值或特定區(qū)間的梯度),并探明合理的取值區(qū)間,細(xì)分為 優(yōu)秀、合格(可酌情優(yōu)化)、不合格(必須優(yōu)化)3個等級。對比大量讀圖并依據(jù)經(jīng)驗判斷的傳統(tǒng)方法,新方法更 直觀高效,更能避免漏判錯判,更能保證設(shè)計的質(zhì)量。確定性能參數(shù)各等級的取值區(qū)間是建立管控標(biāo)準(zhǔn)的難點,它主要依據(jù) 3 個方面綜合制定。
第1是參考了現(xiàn)有的經(jīng)典理論及標(biāo)準(zhǔn)。第2是參考對標(biāo)數(shù)據(jù)庫。長安汽車積累有豐富的對標(biāo)車型主客觀性能數(shù)據(jù),通過統(tǒng)計和對比同類(如轎車、SUV、MPV 等)同級(如SUV細(xì)分為小型、緊湊型、中大型等)車輛的主觀評價和客觀參數(shù)值,可以劃定客觀性能參數(shù)的取值區(qū)間。圖7示例為緊湊型SUV 的側(cè)傾梯度劃分,它基于 15 款對標(biāo)車型的實測值,定義側(cè)傾梯度好于全體均值即小于 4.9 2 為優(yōu)秀,介于全體均值與自主品牌均值間 (4.9 2,5.1 8)為可酌情優(yōu)化,差于自主品牌均值即大于 5.1 8 為不合格。
第3是參考應(yīng)規(guī)避問題庫。長安汽車在35a的乘用車設(shè)計制造歷史中沉淀了豐富的底盤應(yīng)規(guī)避問題,其中的許多案例被量化并融入性能參數(shù)管控標(biāo)準(zhǔn)中。以麥佛遜前懸車型的方向盤抖動問題為例,該問題有非常多的影響因子,其中之一是輪心主銷橫偏距。通過挖掘應(yīng)規(guī)避問題庫發(fā)現(xiàn),兩款抖動嚴(yán)重的車型的輪心主銷偏距均大于75mm,而其他無問題車型的參數(shù)值較小。由此設(shè)定輪心主銷偏距大于75mm為不合格,以此管控后續(xù)車型。從應(yīng)規(guī)避問題庫得出的結(jié)論雖然理論論證較薄弱,但能有效地指導(dǎo)工程實踐。
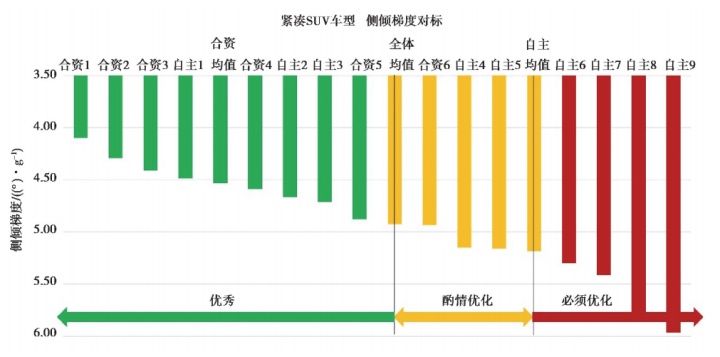
圖 7 緊湊型 SUV 車型側(cè)傾梯度管控邏輯
設(shè)計人員不應(yīng)機械地遵照管控標(biāo)準(zhǔn),而應(yīng)將它視為參考,再結(jié)合工程實際(不僅是性能,也包含成本、質(zhì)量、品控性、時間節(jié)點等方面)做出綜合判斷。此外,隨著理論的進步、對標(biāo)數(shù)據(jù)庫和應(yīng)規(guī)避問題數(shù)據(jù)庫的豐富,管控標(biāo)準(zhǔn)也將不斷調(diào)整和優(yōu)化。5 結(jié)論及展望長安汽車懸架架構(gòu)設(shè)計方法應(yīng)用實時的解析算法設(shè)計硬點,應(yīng)用二次開發(fā)的自動化多體動力學(xué)仿真軟件設(shè)計彈性件,應(yīng)用系統(tǒng)性的底盤性能參數(shù)管控標(biāo)準(zhǔn)判斷懸架方案的性能優(yōu)劣。
相比較傳統(tǒng)方法,新方法約8倍提升了設(shè)計效率并規(guī)避了性能錯判漏判的情況。應(yīng)用新方法進行方案優(yōu)化時仍需手動調(diào)整方案進行試錯,后續(xù)可將多目標(biāo)全局優(yōu)化算法,如遺傳算法, 嵌入硬點設(shè)計模塊(CA-DS)及彈性件設(shè)計模塊(CA-AutoKC)中,使程序能在給定的設(shè)計邊界中自動迭代優(yōu)化,以進一步提升效率。底盤性能管控標(biāo)準(zhǔn)后續(xù)可繼續(xù)向主客觀評價相結(jié)合的方向深入,將客觀性能參數(shù)與主觀評價進行定量的對應(yīng),以進一步提高設(shè)計質(zhì)量。



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
