




 廣告
廣告





















































智能駕駛的數(shù)據(jù)采集與測(cè)評(píng)解決方案
2021-09-30 08:52:23· 來源:焉知 作者:Jessie

當(dāng)前,智能駕駛AI識(shí)別領(lǐng)域高速發(fā)展,人工智能商業(yè)化在算力、算法和技術(shù)方面,基本達(dá)到階段性成熟,應(yīng)用控制能力落地不斷加速。通過算法和應(yīng)用的落地來真正解決行
當(dāng)前,智能駕駛AI識(shí)別領(lǐng)域高速發(fā)展,人工智能商業(yè)化在算力、算法和技術(shù)方面,基本達(dá)到階段性成熟,應(yīng)用控制能力落地不斷加速。通過算法和應(yīng)用的落地來真正解決行業(yè)具體痛點(diǎn),需要采集大量人工智能相關(guān)的原始數(shù)據(jù),并經(jīng)過標(biāo)注處理后做算法訓(xùn)練支撐。
落地場(chǎng)景對(duì)AI數(shù)據(jù)的需求更加多樣化和定制化,也對(duì)AI數(shù)據(jù)服務(wù)的專業(yè)性和質(zhì)量提出了更高的要求。以車載攝像頭識(shí)別的機(jī)視覺圖像處理為例,一個(gè)新場(chǎng)景的開發(fā)支持需要上萬張甚至數(shù)十萬張不等的經(jīng)過采集和標(biāo)注的圖片。隨著AI應(yīng)用場(chǎng)景的豐富,對(duì)AI數(shù)據(jù)服務(wù)將產(chǎn)生長(zhǎng)期海量的需求。
眾所周知,先進(jìn)的自動(dòng)駕駛技術(shù)以有監(jiān)督的深度學(xué)習(xí)為主,算法模型訓(xùn)練對(duì)數(shù)據(jù)有極高要求,隨著自動(dòng)駕駛企業(yè)路測(cè)里程不斷累積,產(chǎn)生了大量多元場(chǎng)景化數(shù)據(jù)。其中要求對(duì)車輛傳感器采集到的大量交通數(shù)據(jù)進(jìn)行清洗、分類、標(biāo)注。其中包括車道線標(biāo)注,可行駛區(qū)域語義分割,車輛、非機(jī)動(dòng)車、行人、車庫拉框標(biāo)注,車輛3D拉框,視頻標(biāo)注、3D激光點(diǎn)云標(biāo)注等在內(nèi)的多種標(biāo)注服務(wù)。
可以說數(shù)據(jù)決定了 AI 的落地程度,而數(shù)據(jù)采集這一過程對(duì)技術(shù)、規(guī)模、專業(yè)度都要求較高。原因主要有以下3方面:
1、數(shù)據(jù)安全
人工智能數(shù)據(jù)的獲取有安全合規(guī)要求,需授權(quán)主機(jī)廠合法的采集和訓(xùn)練權(quán)限,若濫用或通過非法手段獲取,易產(chǎn)生法務(wù)風(fēng)險(xiǎn)。這里且不說在專業(yè)繪圖的地圖公司進(jìn)行相應(yīng)的數(shù)據(jù)采集繪圖也是需要專業(yè)資質(zhì),即便是大型主機(jī)廠在做類似影子模式或道路測(cè)試標(biāo)定過程中,對(duì)于數(shù)據(jù)的采集也是受限的。
2、數(shù)據(jù)質(zhì)量
訓(xùn)練數(shù)據(jù)的質(zhì)量嚴(yán)重影響算法有效性,需要強(qiáng)有力的人員管理和質(zhì)檢手段,確保數(shù)據(jù)質(zhì)量一致性,有效保障數(shù)據(jù)質(zhì)量。
3、數(shù)據(jù)處理效率
采集的數(shù)據(jù)需要整體科學(xué)的項(xiàng)目管理流程,建立合適的數(shù)據(jù)采集、標(biāo)注團(tuán)隊(duì)模式,且需要一套完整的工具和流程支撐,確保數(shù)據(jù)處理效率充分得到保障。
對(duì)于基于數(shù)據(jù)AI開發(fā)者數(shù)據(jù)平臺(tái)而言,包含缺陷挖掘、模型迭代、數(shù)據(jù)管理幾個(gè)部分,整個(gè)數(shù)據(jù)采集標(biāo)定過程由于計(jì)算資源龐大,一般可基于云端管理單元進(jìn)行計(jì)算和資源分配。
本文將系統(tǒng)的講解智能駕駛系統(tǒng)開發(fā)過程中的數(shù)據(jù)采集流程、標(biāo)注及如何應(yīng)用于仿真測(cè)評(píng)及性能提升。
數(shù)據(jù)采集流程及方法
數(shù)據(jù)采集標(biāo)注平臺(tái)從下至上包括基礎(chǔ)(數(shù)據(jù))層、加工(工具)層、中間(流程)層、應(yīng)用層幾個(gè)層級(jí),而整個(gè)過程通過數(shù)據(jù)管理和數(shù)據(jù)存儲(chǔ)可有效地應(yīng)用于場(chǎng)景重構(gòu)與數(shù)據(jù)訓(xùn)練模型。

數(shù)據(jù)采集處理的完成流程包括原始數(shù)據(jù)采集、特征數(shù)據(jù)標(biāo)注、場(chǎng)景數(shù)據(jù)分類、基礎(chǔ)數(shù)據(jù)管理、模型數(shù)據(jù)訓(xùn)練幾大部分。這里需要說明的是數(shù)據(jù)采集和需要標(biāo)注的數(shù)據(jù)需求主要來源于智能駕駛系統(tǒng)的場(chǎng)景感知能力需求。標(biāo)注的模型主要用于在測(cè)試匹配驗(yàn)證階段進(jìn)行問題分析及原因追溯。標(biāo)注的方式通常采用視頻圖像框選進(jìn)行,可助力圖像識(shí)別模型訓(xùn)練,用于框選視頻圖像中的識(shí)別主體目標(biāo),常見于對(duì)人臉、人體、障礙物、紅綠燈的框選。
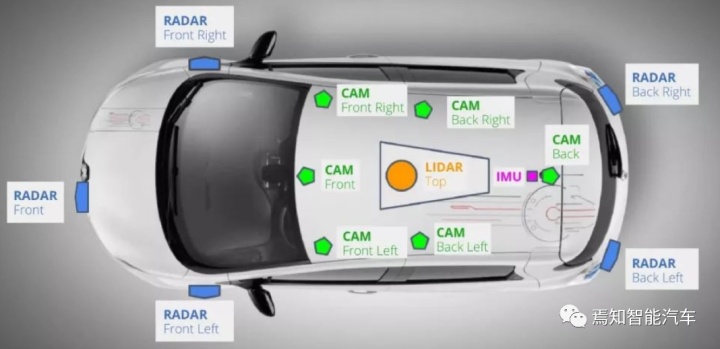
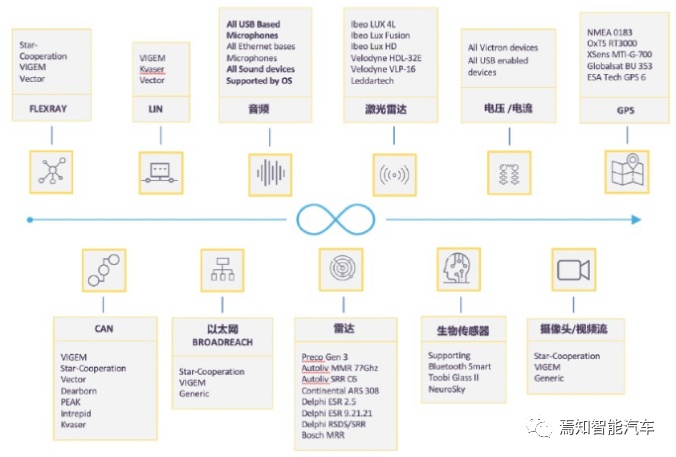
智能駕駛中的數(shù)據(jù)采集分析軟件,需要首先支持將CAN、LIN、Ethernet 等總線數(shù)據(jù)同步匯集, 并加入視頻、GPS 以及各種傳感器等數(shù)據(jù),以便支撐后續(xù)的場(chǎng)景分析、算法訓(xùn)練等。同時(shí)智能駕駛的算法開發(fā)驗(yàn)證也需要大量的數(shù)據(jù),數(shù)據(jù)采集硬件端需要提供開放的平臺(tái)接口及其所需的數(shù)據(jù)接口。這里的數(shù)據(jù)采集主要指基于攝像頭、Lidar、4D毫米波雷達(dá)的環(huán)境識(shí)別,采集流程包括需求分析、制定采集方案、獲取數(shù)據(jù)、數(shù)據(jù)加工、標(biāo)準(zhǔn)化數(shù)據(jù)輸出、可用數(shù)據(jù)驗(yàn)收幾個(gè)大的方面。采集的數(shù)據(jù)類型通常包括語音、圖像、多模態(tài)數(shù)據(jù)。
數(shù)據(jù)采集設(shè)備通常包括工控機(jī)、車機(jī)、電腦及處理芯片。
工控機(jī):主要功能是進(jìn)行數(shù)據(jù)搜集,一般需要支持多路圖像(可自定義4-6路)和一路語音錄制;
車機(jī)/中央域控:主要功能是進(jìn)行處理圖像的即時(shí)顯示,一般需要支持IR+RGB圖像及語音錄制,支持多路模態(tài)數(shù)據(jù);
本地計(jì)算機(jī):主要是對(duì)采集回來的數(shù)據(jù)進(jìn)行線下標(biāo)注,一般需要支持對(duì)單路語音或圖像的時(shí)間戳對(duì)齊。
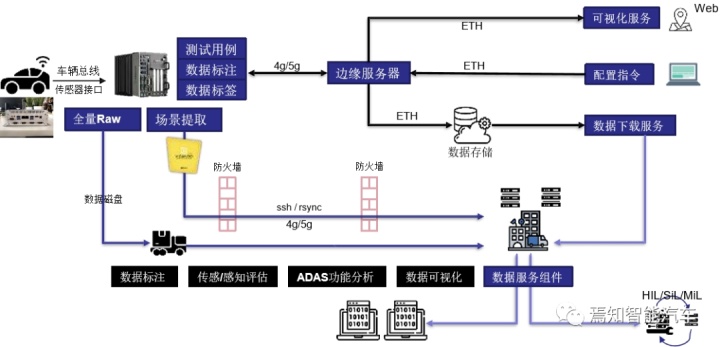
數(shù)據(jù)采集平臺(tái)需要采用靈活的主機(jī)選擇,從邊緣傳感器融合再到傳感器信號(hào)旁通,從中央數(shù)據(jù)采集到數(shù)據(jù)存儲(chǔ)陣列,不同的組合可以滿足開發(fā)過程中不同的應(yīng)用需求。
采集數(shù)據(jù)標(biāo)注過程分析
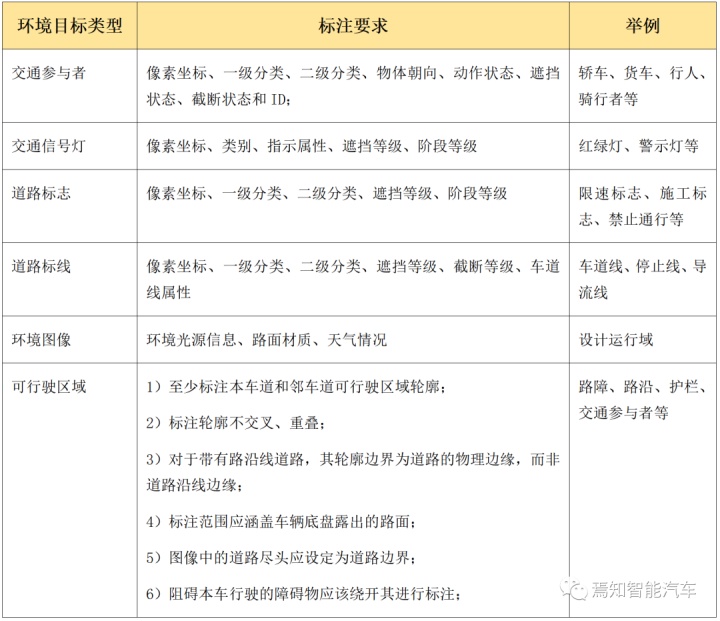
數(shù)據(jù)標(biāo)注涉及圖像、點(diǎn)云等各種不同輸入傳感器數(shù)據(jù)類型,標(biāo)注過程包括提起標(biāo)注需求、注入標(biāo)注方案,實(shí)際數(shù)據(jù)標(biāo)注(包括數(shù)據(jù)清洗、數(shù)據(jù)評(píng)估、數(shù)據(jù)提取、數(shù)據(jù)分析),最后通過數(shù)據(jù)審核,則生成相應(yīng)的數(shù)據(jù)標(biāo)注結(jié)果,可用于下載。其中,數(shù)據(jù)標(biāo)注過程需要滿足一定的要求和原則,包括如下:
對(duì)于在AI賦能下的自動(dòng)駕駛的具體應(yīng)用主要有以下幾種:
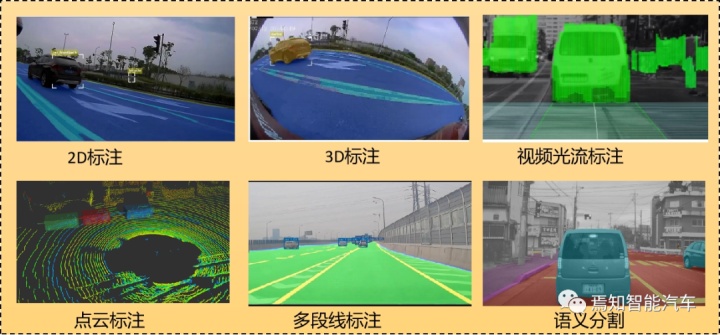
1、2D框標(biāo)注,應(yīng)用于對(duì)車輛與行人的基礎(chǔ)識(shí)別,即標(biāo)注出騎行的人,步行的人,汽車等;
2、3D立方體標(biāo)注,對(duì)車輛進(jìn)行區(qū)域標(biāo)注及分類標(biāo)注,應(yīng)用于對(duì)車輛類型的識(shí)別,例如面包車、卡車、大客車、小轎車等,訓(xùn)練自動(dòng)駕駛,在道上選擇性跟車或者變道操作;
3、點(diǎn)云標(biāo)注,對(duì)3D激光雷達(dá)點(diǎn)云進(jìn)行標(biāo)注;
4、多段線標(biāo)注,車道線標(biāo)注:一種對(duì)道路地面標(biāo)線進(jìn)行的綜合標(biāo)注,包括區(qū)域標(biāo)注、分類標(biāo)注及語義標(biāo)注,應(yīng)用于訓(xùn)練自動(dòng)駕駛,根據(jù)車道規(guī)則進(jìn)行行駛。
針對(duì)如上的標(biāo)注方式,需要說明的是在自動(dòng)駕駛設(shè)計(jì)過程中,我們更加關(guān)注對(duì)于3維目標(biāo)障礙物的識(shí)別,常用的檢測(cè)方式是采取激光雷達(dá)或4D毫米波雷達(dá)進(jìn)行目標(biāo)檢測(cè)。檢測(cè)結(jié)果通過如上2D或3D進(jìn)行點(diǎn)云標(biāo)注,其中3D點(diǎn)云標(biāo)注主要應(yīng)用于基于激光雷達(dá)或4D高分辨率毫米波雷達(dá)的訓(xùn)練,針對(duì)自動(dòng)駕駛主要場(chǎng)景而言應(yīng)用先進(jìn)的標(biāo)注工具,可對(duì)3D障礙物進(jìn)行框選、對(duì)雷達(dá)圖進(jìn)行語義分割,對(duì)于環(huán)境中的三維模型或障礙物實(shí)現(xiàn)更好的識(shí)別分類。另一種標(biāo)注方式是進(jìn)行2D3D融合標(biāo)注,借助先進(jìn)的標(biāo)注工具,可對(duì)環(huán)境中的二維和三維數(shù)據(jù)參照是否具備明顯的深度信息,圖像的形狀模型信息同時(shí)確定進(jìn)行聯(lián)合標(biāo)注。幫助車輛實(shí)現(xiàn)視覺和雷達(dá)的感知,可應(yīng)用于自動(dòng)駕駛場(chǎng)景的訓(xùn)練落地。
5、語義分割,對(duì)圖片中的不同區(qū)域進(jìn)行分割標(biāo)注:這些類可能是行人,車輛,建筑物,天空,植被等等。例如,語義分割可以幫助SDCs(自動(dòng)駕駛車輛)識(shí)別一個(gè)圖片中的可行駛區(qū)域。
圖像語義分割是基于區(qū)域的多邊形標(biāo)注,對(duì)復(fù)雜不規(guī)則的圖片進(jìn)行區(qū)域劃分并標(biāo)注對(duì)應(yīng)屬性,助力圖像識(shí)別模型訓(xùn)練,多應(yīng)用于人體分割、場(chǎng)景分割和自動(dòng)駕駛道路分割。
6、視頻跟蹤標(biāo)注,跟蹤標(biāo)注視頻中行駛的車輛,是將視覺數(shù)據(jù)按照?qǐng)D片幀抓取進(jìn)行標(biāo)框標(biāo)注,標(biāo)注后的圖片幀按照順序重新組合成視頻數(shù)據(jù)訓(xùn)練自動(dòng)駕駛。
視頻跟蹤標(biāo)注又稱為連續(xù)幀標(biāo)注,常用于自動(dòng)駕駛及視頻圖像識(shí)別模型的訓(xùn)練,通常應(yīng)用于下一代自動(dòng)駕駛圖像識(shí)別場(chǎng)景的幀率較高如果在識(shí)別分類過程中對(duì)每一幀圖像都進(jìn)行目標(biāo)物標(biāo)注,則會(huì)導(dǎo)致在模型訓(xùn)練中存在較大的計(jì)算量,常用的方法是通過對(duì)視頻進(jìn)行抽幀注,并抽取的每一幀圖片中的目標(biāo)物體進(jìn)行連續(xù)標(biāo)注,不僅可以大大降低運(yùn)算量,又可以降低識(shí)別標(biāo)注的難度,增強(qiáng)標(biāo)注的效率。
此外,對(duì)于智能座艙內(nèi)部的駕駛員監(jiān)控平臺(tái)而言,要識(shí)別駕駛員的面部表情、神態(tài)、疲勞程度、注意力程度、人臉分析,就需要對(duì)駕駛員形態(tài)進(jìn)行精確識(shí)別,將人臉部分骨骼進(jìn)行打點(diǎn)分析,并基于所打點(diǎn)的部分進(jìn)行標(biāo)注,標(biāo)注后的圖像可很好的助力于圖像識(shí)別模型訓(xùn)練。
基于數(shù)據(jù)采集的后端仿真管理
數(shù)據(jù)采集后端除開可進(jìn)行模型訓(xùn)練外,還可以進(jìn)行場(chǎng)景仿真。仿真的輸入包含基于自然采集數(shù)據(jù)統(tǒng)計(jì)參數(shù)范圍,通過open工具可大規(guī)模生成測(cè)試場(chǎng)景。在滿足上述場(chǎng)景測(cè)試需求的同時(shí),隨著系統(tǒng)及場(chǎng)景復(fù)雜性要求,由于自動(dòng)駕駛功能的設(shè)計(jì)缺陷及可合理預(yù)見的人員誤用導(dǎo)致產(chǎn)生預(yù)期功能安全問題愈發(fā)嚴(yán)重,針對(duì)預(yù)期功能安全設(shè)計(jì)場(chǎng)景庫已成為自動(dòng)駕駛系統(tǒng)驗(yàn)證的重中之重。最終從宏觀層面,保證測(cè)試場(chǎng)景的多源異構(gòu),場(chǎng)景數(shù)據(jù)涉及不同城市、不同地域,并具體到不同自動(dòng)駕駛功能ODD范圍。微觀層面,依托真實(shí)駕駛數(shù)據(jù),確保場(chǎng)景內(nèi)元素取值的真實(shí)性與合理性。
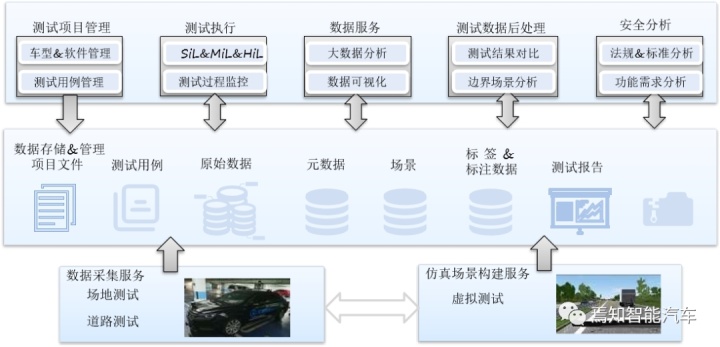
通過采集的不同場(chǎng)景數(shù)據(jù),基于場(chǎng)景提取原則,確定關(guān)鍵場(chǎng)景生成元素,建立場(chǎng)景生成及篩選機(jī)制,產(chǎn)生高效、合理且典型的場(chǎng)景,通過軟件匹配,可以確保由參數(shù)范圍生成測(cè)試場(chǎng)景的有效性。測(cè)試驗(yàn)證自動(dòng)駕駛功能在危險(xiǎn)工況下的性能表現(xiàn),旨在將危險(xiǎn)場(chǎng)景通過自動(dòng)駕駛功能的合理設(shè)計(jì)和迭代升級(jí)轉(zhuǎn)換成安全場(chǎng)景,降低事故發(fā)生率。同時(shí),考慮數(shù)據(jù)采集管理階段充分考慮場(chǎng)景中的各元素,從海量測(cè)試場(chǎng)景中選取高質(zhì)量代表性場(chǎng)景,在算法調(diào)試和功能驗(yàn)證階段節(jié)省測(cè)試時(shí)間,加速測(cè)試驗(yàn)證過程。計(jì)算單個(gè)測(cè)試場(chǎng)景的復(fù)雜程度,選取代表性典型場(chǎng)景,剔除冗余和低質(zhì)量場(chǎng)景。通過數(shù)據(jù)驅(qū)動(dòng)的方式,尋找采集場(chǎng)景數(shù)據(jù)中難以獲取的邊角場(chǎng)景,保證對(duì)自動(dòng)駕駛系統(tǒng)驗(yàn)證的全面性要求。以自然駕駛場(chǎng)景數(shù)據(jù)為基礎(chǔ),通過統(tǒng)計(jì)學(xué)合理外推(例如:μ+3σ原則),尋找現(xiàn)實(shí)生活中難以發(fā)現(xiàn)的低概率場(chǎng)景。采用高維搜索與自延展學(xué)習(xí)理論,實(shí)現(xiàn)已知不安全場(chǎng)景庫的構(gòu)建,通過建立搜索約束和加速搜索邏輯擴(kuò)大已知不安全場(chǎng)景庫,縮小未知不安全領(lǐng)域,確保自動(dòng)駕駛系統(tǒng)的安全性要求。
總結(jié)
目前自動(dòng)駕駛的主流算法模型主要以有監(jiān)督的深度學(xué)習(xí)方式為主,需要大量的結(jié)構(gòu)化標(biāo)注數(shù)據(jù)對(duì)模型進(jìn)行訓(xùn)練和調(diào)優(yōu)??梢姅?shù)據(jù)采集、標(biāo)注在其中扮演了極為重要的角色。本文重點(diǎn)介紹了數(shù)據(jù)采集、標(biāo)注的整個(gè)過程需求、方法、原則、類型要素及仿真場(chǎng)景重構(gòu)等。數(shù)據(jù)采集流程包收集三大主要流程,其中涉及需求收集階段進(jìn)行原始采集需求收集;數(shù)據(jù)獲取服務(wù)涉及數(shù)據(jù)獲取包含定制數(shù)據(jù)方案、人工數(shù)據(jù)采集、自動(dòng)化數(shù)據(jù)采集、調(diào)研問卷收集幾大方面。數(shù)據(jù)加工服務(wù)涉及數(shù)據(jù)清洗、數(shù)據(jù)評(píng)估、數(shù)據(jù)提取、分析處理及標(biāo)準(zhǔn)化數(shù)據(jù)輸出。數(shù)據(jù)交付階段主要涉及將采集數(shù)據(jù)輸入至訓(xùn)練模型進(jìn)行智能學(xué)習(xí)過程。
在功能開發(fā)過程中,利用好數(shù)據(jù)采集、標(biāo)注方法可以很好的提升場(chǎng)景重構(gòu)、訓(xùn)練能力,提升前期軟件開發(fā)性能。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 63



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
