




 廣告
廣告





















































電動(dòng)物流車匹配設(shè)計(jì)與效率優(yōu)化控制策略研究
2021-10-01 09:06:06· 來源:汽車技術(shù)研究所

由于傳統(tǒng)內(nèi)燃機(jī)汽車的能耗和排放難以取得質(zhì)的突破,使得汽車新能源技術(shù)的發(fā)展成為人們關(guān)注的焦點(diǎn)[1]。與其他類型的新能源汽車相比,純電動(dòng)汽車僅使用電能作為驅(qū)
由于傳統(tǒng)內(nèi)燃機(jī)汽車的能耗和排放難以取得質(zhì)的突破,使得汽車新能源技術(shù)的發(fā)展成為人們關(guān)注的焦點(diǎn)[1]。與其他類型的新能源汽車相比,純電動(dòng)汽車僅使用電能作為驅(qū)動(dòng)能 源,零排放、零油耗,是未來汽車發(fā)展的重要方向[2-4]。然而,純電動(dòng)汽車除了具有零污染、零油耗的優(yōu)點(diǎn)外,還面臨許多技術(shù)難題,如續(xù)駛里程不足、充電基礎(chǔ)設(shè)施不完善以及充電時(shí)間過長(zhǎng)等。較短的續(xù)駛里程意味著純電動(dòng)汽車消費(fèi)者具有較高程度的“里程焦慮”[5-7]。而充電基礎(chǔ)設(shè)施的缺乏無疑會(huì)進(jìn)一步加劇消費(fèi)者對(duì)使用純電動(dòng)汽車的擔(dān)憂。若要解決充電基礎(chǔ)設(shè)施不完善和充電時(shí)間過長(zhǎng)等難題,所涉及 的難度、規(guī)模都比較大,不易實(shí)現(xiàn)。因此,若要提高純電動(dòng)汽車的市場(chǎng)占有率,需從改善其續(xù)駛里程入手。
本文針對(duì)純電動(dòng)汽車,制定效率優(yōu)化控制策略,有效提升整車經(jīng)濟(jì)性。本文通過多元線性回歸得到動(dòng)力電池效率,充放電功率和SOC 三者的關(guān)系,將動(dòng)力電池效率圖根據(jù) SOC 區(qū)間分為多個(gè)部分,使效率曲線的設(shè)計(jì)方程更好地適應(yīng)效率圖,從而制 定考慮效率優(yōu)化的控制策略。最終對(duì)本文提出的控制策略進(jìn)行仿真和實(shí)車驗(yàn)證,該策略進(jìn)一步提高了整車?yán)m(xù)駛里程。
1 電動(dòng)物流車動(dòng)力系統(tǒng)參數(shù)匹配
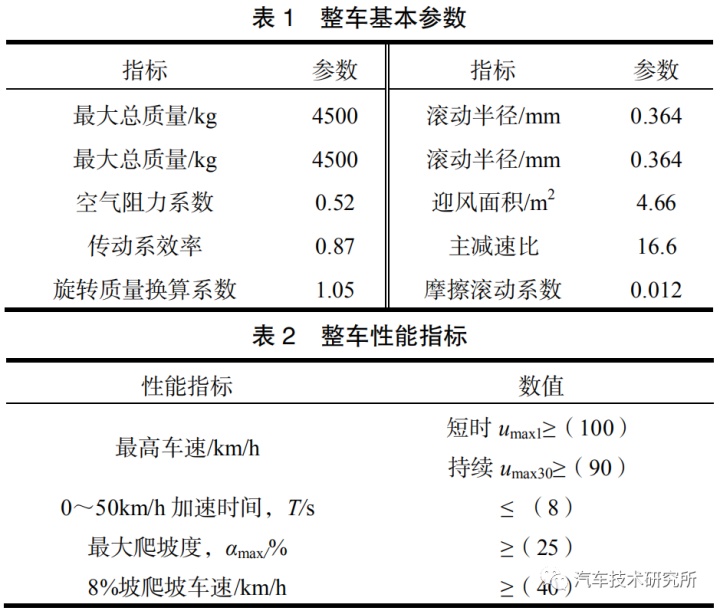
本文研究的純電動(dòng)物流車的動(dòng)力系統(tǒng)結(jié)構(gòu)如圖 1 所示, 整車基本參數(shù)和性能指標(biāo)如表 1、2 所示。
1.1 驅(qū)動(dòng)電機(jī)參數(shù)
對(duì)于純電動(dòng)汽車,電機(jī)功率參數(shù)的選擇要根據(jù)純電動(dòng)行駛時(shí)的最高車速、加速性能和爬坡性能要求確定。
1.1.1 最高車速
對(duì)于整車最高車速,包括持續(xù) 30 分鐘最高車速和持續(xù) 1 分鐘最高車速,分別對(duì)應(yīng)整車性能指標(biāo)中的持續(xù)最高車速和短時(shí)最高車速。驅(qū)動(dòng)電機(jī)的最大功率 Pr1 需滿足最高車速時(shí)的功率需求,如式所示:

式中,Pu max 為短時(shí)或持續(xù)最高車速對(duì)應(yīng)的最大功率;m 為整車質(zhì)量;g 為重力加速度;f 為滾動(dòng)阻力系數(shù);Cd為空氣阻力系數(shù);A 為迎風(fēng)面積;ηt 為傳動(dòng)效率;umax 為短時(shí)或持續(xù)最高車速。
1.1.2 爬坡性能
對(duì)于爬坡性能,分別計(jì)算在爬坡度為 20%、25%和 30%, 不同爬坡穩(wěn)定車速下的純電動(dòng)汽車的需求功率 Pr2,如式所示:

式中,uα為爬坡車速;α 為爬坡角度。1.1.3 加速性能對(duì)于加速性能所需功率,設(shè)定在水平路面上從原地起步電動(dòng)汽車加速到 50 km/h 不超過 8 s。在加速末端時(shí)刻輸出的 最大功率 Pr3為:

式中,δ 為旋轉(zhuǎn)質(zhì)量換算系數(shù);vm 為加速時(shí)最高車速;dt 為時(shí)間步長(zhǎng);tm為加速時(shí)間;x 為擬合系數(shù)。1.1.4 電機(jī)轉(zhuǎn)速驅(qū)動(dòng)電機(jī)最高轉(zhuǎn)速:

式中,r 為輪胎滾動(dòng)半徑;i0為主減速器傳動(dòng)比。
1.1.5 電機(jī)峰值扭矩
驅(qū)動(dòng)電機(jī)峰值扭矩:
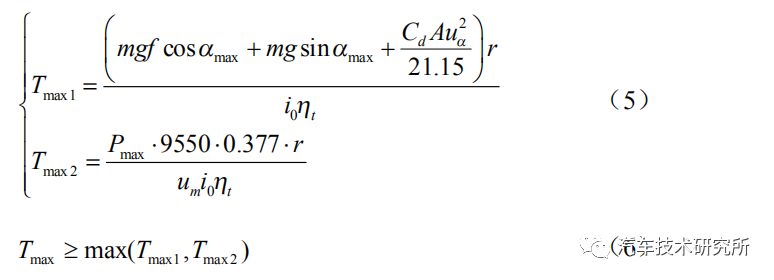
式中:Tmax1 為根據(jù)最大爬坡度 αmax 確定驅(qū)動(dòng)電機(jī)的最大扭矩;Tmax2 為根據(jù)電機(jī)驅(qū)動(dòng)峰值功率 Pmax 確定的驅(qū)動(dòng)電機(jī)最 大的扭矩。1.1.6 電機(jī)額定扭矩驅(qū)動(dòng)電機(jī)額定扭矩 Te:

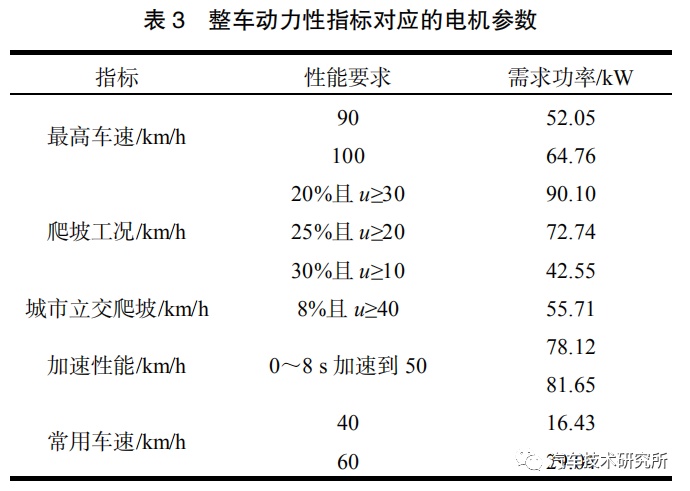
式中,Pe 為電機(jī)額定功率;ne 為電機(jī)額定轉(zhuǎn)速。純電動(dòng)汽車的電機(jī)峰值功率必須不小于三大動(dòng)力性指標(biāo)所確定的功率,即:

根據(jù)以上設(shè)計(jì)過程,電機(jī)的基本需求參數(shù),如表 3 所示:
最終,所選電機(jī)的效率和功率分別如下圖所示。

1.2 動(dòng)力電池參數(shù)
1.2.1 電池組功率參數(shù)
電池組在純電動(dòng)時(shí),為電機(jī)提供放電功率,因此電池組 的最大放電功率 Pr_max 必須大于電動(dòng)機(jī)的峰值功率,即:
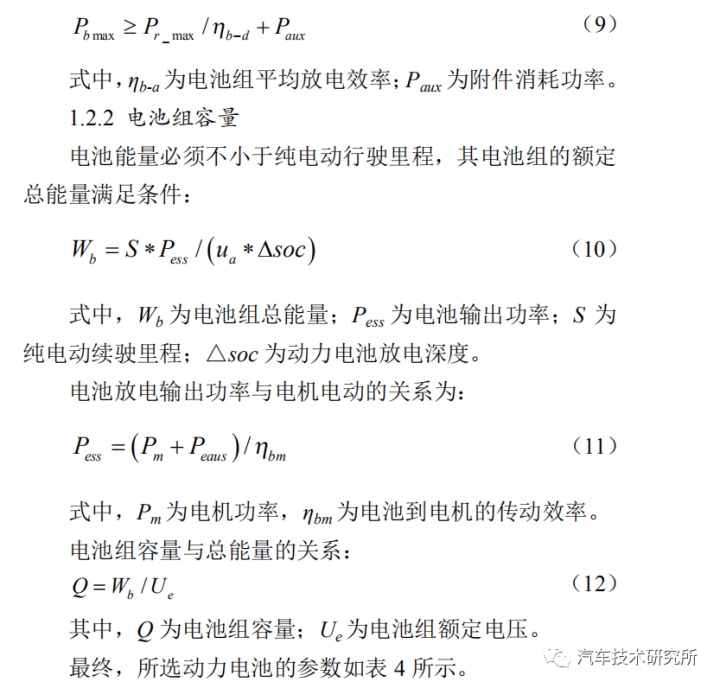

考慮到環(huán)境溫度對(duì)電池性能參數(shù)的影響,本文分別取溫 度為 10 ℃、25 ℃和 45 ℃下,分析單體電池開端電壓、充放電內(nèi)阻和電池 SOC 的關(guān)系,如圖 4 所示,為不同溫度下,電池性能參數(shù)隨 SOC 的變化。
2 構(gòu)建效率優(yōu)化控制策略
效率優(yōu)化的關(guān)鍵是對(duì)動(dòng)力系統(tǒng)關(guān)鍵參數(shù)的優(yōu)化,使 EV工作在最佳的工作區(qū)間,有效提升整車?yán)m(xù)駛里程。為了提高純電動(dòng)物流車的經(jīng)濟(jì)性,并解決整車在運(yùn)行過程中動(dòng)力元件效率對(duì)系統(tǒng)能量利用率影響的問題,在合理的參數(shù)匹配基礎(chǔ)上,制定了基于多元線性回歸的效率優(yōu)化控制策略。
為了計(jì)算效率圖的最大優(yōu)點(diǎn),通過多元線性回歸得到動(dòng)力電池效率,電流和 SOC 三者的關(guān)系并通過 Matlab 創(chuàng)建并 計(jì)算了效率曲面曲線,如圖 5 所示。由圖可知,大部分?jǐn)?shù)據(jù) 點(diǎn)均落在擬合的效率曲面上,然而,某些高效率點(diǎn)(如紅色圈內(nèi))不能通過曲線擬合得到,尤其在低 SOC 區(qū)間時(shí),導(dǎo)致優(yōu)化過程難以達(dá)到最佳的效率點(diǎn)。

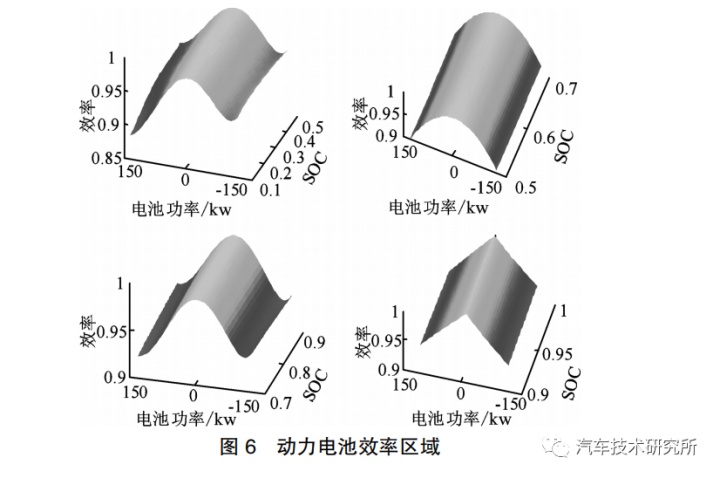
為了解決上述問題,從而達(dá)到更好的曲線擬合效果,本 文將動(dòng)力電池效率圖,根據(jù) SOC 區(qū)間分為多個(gè)部分,使曲線的設(shè)計(jì)方程更好地適應(yīng)效率圖。利用多元線性回歸方程將動(dòng)力電池效率按照不同的 SOC 區(qū)間(SOC<0.5,0.5<=SOC<0.7, 0.7<=SOC<0.9,SOC>=0.9)劃分為四部分,最終的動(dòng)力電池效率區(qū)域如圖 6 所示。
3 實(shí)驗(yàn)與結(jié)果分析
為驗(yàn)證本文制定的效率優(yōu)化控制策略的有效性,開展對(duì)比實(shí)驗(yàn)驗(yàn)證,與基于 map 的方法進(jìn)行經(jīng)濟(jì)性能比較。
3.1 效率優(yōu)化控制策略性能實(shí)驗(yàn)
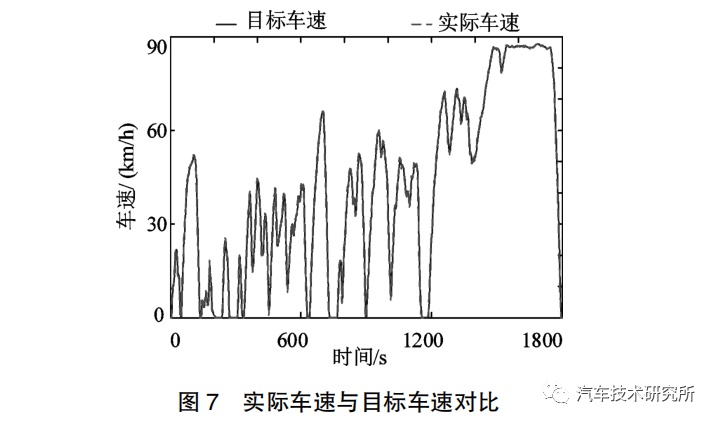
為了驗(yàn)證本文提出的基于多元線性回歸的效率優(yōu)化控制策略能夠進(jìn)一步提高整車經(jīng)濟(jì)性,將與基于 map 的方法進(jìn)行對(duì)比。為了清楚表示,這里僅列出在一個(gè) CWTVC 循環(huán)工況下的結(jié)果,如圖 8 所示,為實(shí)際車速與目標(biāo)車速的對(duì)比圖,在工況運(yùn)行過程中,實(shí)際車速可以很好地跟隨目標(biāo)車速。
如圖 8 所示,圖(a)為一個(gè) CWTVC 循環(huán)工況下電機(jī)功率對(duì)比圖,電機(jī)功率大致分布在-46.5 kw 至 58 kw 之間。圖(b)為一個(gè) CWTVC 循環(huán)工況下電池放電信號(hào)示意圖,放電信號(hào)在 0 和 1 之間不斷切換,其中 1 代表電池此刻在放電。為了清楚反映 SOC 的變化趨勢(shì),圖(c)為多個(gè)重復(fù) CWTVC 循環(huán)工況下兩種策略下的 SOC 對(duì)比圖,結(jié)果表明,基于效率優(yōu)化控制策略最后 SOC 為 0.131 7,電量消耗 3.372 5 kwh;基于 map 的策略最后的 SOC 為 0.100,電量消耗 3.372 6 kwh。基于效率優(yōu)化控制策略相比基于 map 的方法,在電量消耗量接 近的情況下,采用效率優(yōu)化控制策略剩余 SOC 更多,經(jīng)濟(jì)性更優(yōu)。

如圖 9 所示,為兩種策略下實(shí)際效率對(duì)比圖,為了清楚表示,將 SOC 區(qū)間在 0.35 至 0.55 間的實(shí)際效率點(diǎn)放大,如 圖 9(b),可以明顯看到,這兩種策略均能工作在高效率區(qū)間,其中,基于 map 的方法,實(shí)際充放電效率區(qū)間在[0.96,1],基于效率優(yōu)化控制策略的實(shí)際充放電效率在[0.97,1],效率稍優(yōu) 于基于 map 的方法,使動(dòng)力電池更多地工作在高效率區(qū)間,提高整車經(jīng)濟(jì)性。
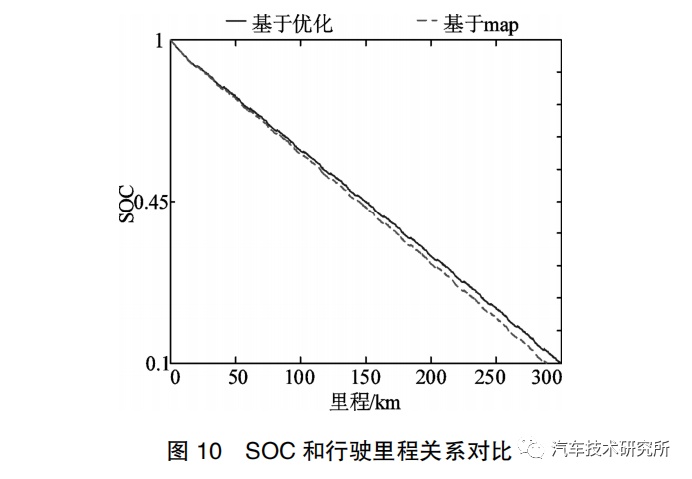
如圖 10 為兩種策略下,電量耗盡時(shí)行駛里程對(duì)比圖,基于 map 的方法最終行駛里程為 288 km,基于效率優(yōu)化控制策略的最終行駛里程為 300 km,相比基于 map 的方法,續(xù)駛里程更長(zhǎng),每月可多跑 360 km。
3.2 實(shí)車驗(yàn)證
在某公司轉(zhuǎn)轂試驗(yàn)室開展該電動(dòng)車 CWTVC 工況下的續(xù)駛里程測(cè)試。主要試驗(yàn)設(shè)備:德國(guó) MAHA 公司的底盤測(cè)功 機(jī),型號(hào) 72H-2MOT。圖 11 為實(shí)測(cè) CWTVC 工況下續(xù)駛里程的過程數(shù)據(jù),電流為正值,代表能量輸出放電過程,電流 為負(fù)值時(shí),代表能量回收過程。
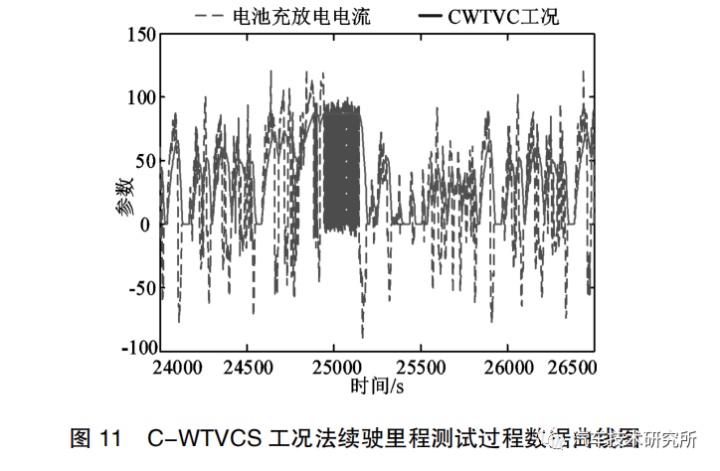
試驗(yàn)樣車實(shí)施了效率優(yōu)化控制策略后,實(shí)測(cè) CWTVC 工 況下續(xù)駛里程為 297.2 km。
4 結(jié)論
(1)以提高純電動(dòng)汽車的經(jīng)濟(jì)性為研究目標(biāo),在構(gòu)建純電動(dòng)汽車模型的基礎(chǔ)上,制定考慮效率的控制策略。
(2)通過仿真實(shí)驗(yàn)表明,基于效率優(yōu)化控制策略,相比基于 map 的方法,在工況運(yùn)行過程中,動(dòng)力電池工作在更高的效率區(qū)間,在相同 SOC 區(qū)間下,續(xù)駛里程更長(zhǎng),每月可多 跑 360 km,在經(jīng)濟(jì)上優(yōu)于基于 map 的方法,為后續(xù)項(xiàng)目開發(fā) 提供了參考。
(3)今后將進(jìn)一步研究再生制動(dòng)能量回收對(duì)續(xù)駛里程 的影響及提升方案。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 106



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
