




 廣告
廣告





















































新能源汽車制動(dòng)能量收回系統(tǒng)
2021-11-15 19:59:57· 來源:驅(qū)動(dòng)視界

1. 新能源汽車制動(dòng)能量回收概述新能源汽車制動(dòng)能量收回,又稱能量再生制動(dòng)(簡稱再生制動(dòng)),是指在車輛減速或制動(dòng)時(shí),使驅(qū)動(dòng)電機(jī)作于發(fā)電機(jī)工況,將車輛的一部
1. 新能源汽車制動(dòng)能量回收概述
新能源汽車制動(dòng)能量收回,又稱能量再生制動(dòng)(簡稱再生制動(dòng)),是指在車輛減速或制動(dòng)時(shí),使驅(qū)動(dòng)電機(jī)作于發(fā)電機(jī)工況,將車輛的一部分慣性動(dòng)能轉(zhuǎn)化為電能并回饋至電源的過程。新能源汽車制動(dòng)能量收回概述
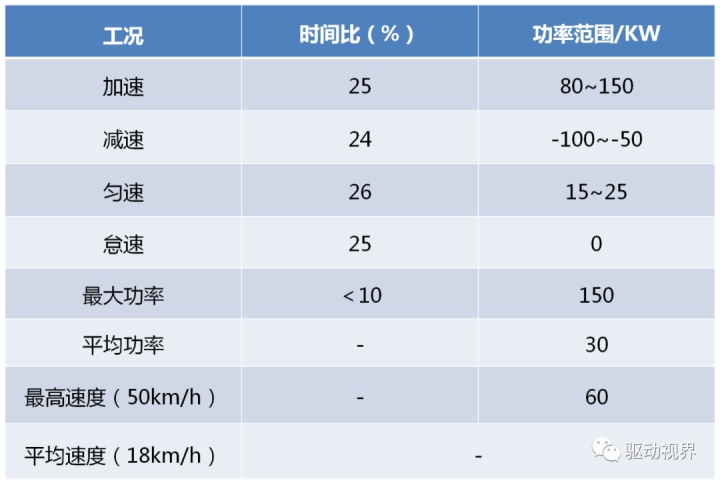
1.1 城市公交車工況
純電動(dòng)汽車和混合動(dòng)力電動(dòng)汽車最重要特性之一是其顯著回收制動(dòng)能量的能力。純電動(dòng)汽車和混合動(dòng)力電動(dòng)汽車中電動(dòng)機(jī)可被控制作為發(fā)電機(jī)運(yùn)行,從而將車輛的動(dòng)能或位能變換為電能,并儲(chǔ)存在能量存儲(chǔ)裝置(各種蓄電池、超級(jí)電容、超高速飛輪或者它們之間的復(fù)合)之中,以延長其續(xù)行駛里程。
1.2 制動(dòng)中的能量損耗
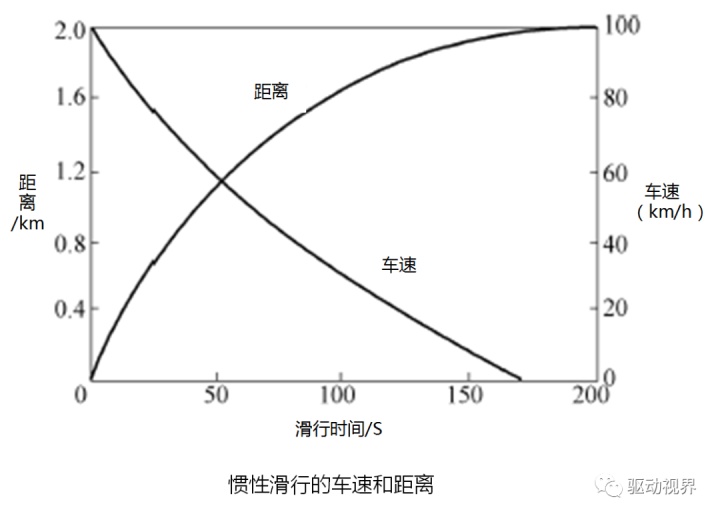
汽車在制動(dòng)期間,消耗了較多的能量。例如,將1500kg車輛從100km/h車速制動(dòng)到零車速,在幾十米距離內(nèi)約消耗了0.16kW·h的能量。如果能量消耗在僅克服阻力(滾動(dòng)阻力和空氣阻力)而沒有制動(dòng)的慣性滑行中,則該車輛將行駛約2km,如圖所示。

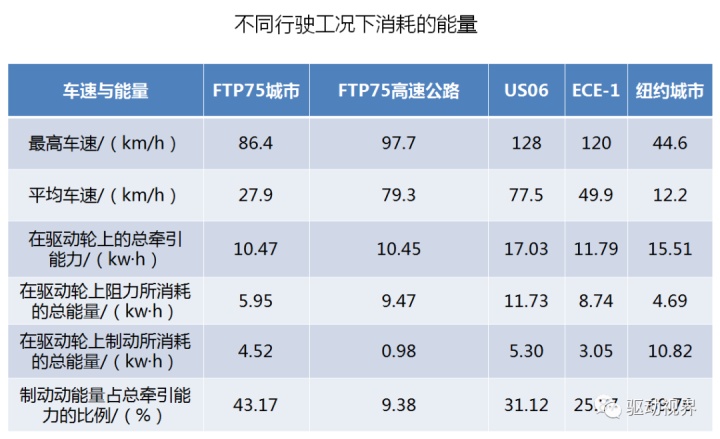
圖展示了不同城市公交車工況的比例。表8-2列出了在不同的行駛工況下,1500kg客車的最高車速、平均車速、驅(qū)動(dòng)輪上的總牽引能量,以及每100km行程因阻力和制動(dòng)所消耗的總能量。

1.3新能源汽車制動(dòng)能量收回方法
1. 飛輪儲(chǔ)能
飛輪儲(chǔ)能是利用高速旋轉(zhuǎn)的飛輪來儲(chǔ)存和釋放能量,其基本工作原理是:當(dāng)車輛制動(dòng)或減速時(shí),先將車輛在制動(dòng)或減速過程中的動(dòng)能轉(zhuǎn)換為飛輪高速旋轉(zhuǎn)的動(dòng)能;當(dāng)車輛再次起動(dòng)或加速時(shí),高速旋轉(zhuǎn)的飛輪又將存儲(chǔ)的動(dòng)能通過傳動(dòng)裝置轉(zhuǎn)化為車輛行駛的驅(qū)動(dòng)力。
飛輪儲(chǔ)能式制動(dòng)能量再生系統(tǒng)構(gòu)成如圖所示,主要由發(fā)動(dòng)機(jī)、高速儲(chǔ)能飛輪、增速齒輪、飛輪離合器和驅(qū)動(dòng)橋組成。發(fā)動(dòng)機(jī)用來提供驅(qū)動(dòng)車輛的主要?jiǎng)恿?,高速?chǔ)能飛輪用來回收制動(dòng)能量以及作為負(fù)荷平衡裝置,為發(fā)動(dòng)機(jī)提供輔助的功率以滿足峰值功率要求。

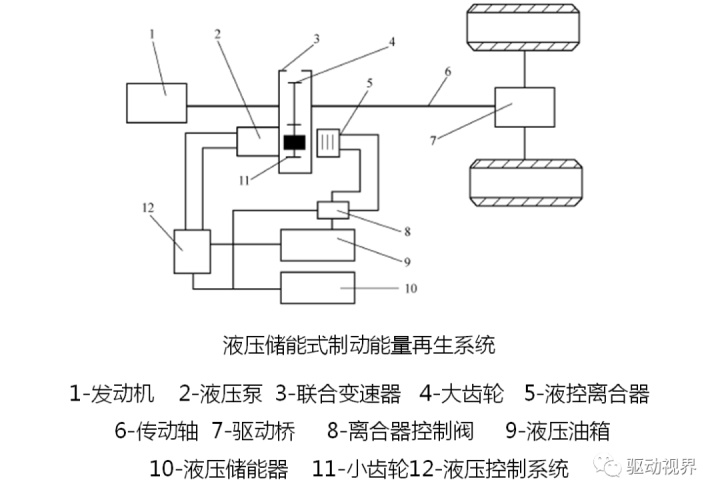
2. 液壓儲(chǔ)能
其工作原理是:先將車輛在制動(dòng)或減速過程中的動(dòng)能轉(zhuǎn)換成液壓能,并將液壓能儲(chǔ)藏在液壓儲(chǔ)能器中;當(dāng)車輛再次起動(dòng)或加速時(shí),儲(chǔ)能系統(tǒng)又將儲(chǔ)能器中的液壓能以機(jī)械能的形式反作用于車輛,以增加車輛的驅(qū)動(dòng)力。
圖所示為利用液壓儲(chǔ)能原理設(shè)計(jì)的一種制動(dòng)能量再生回收系統(tǒng)。系統(tǒng)由發(fā)動(dòng)機(jī)、液壓泵、液壓儲(chǔ)能器、聯(lián)動(dòng)變速箱、驅(qū)動(dòng)橋、液控離合器和液壓控制系統(tǒng)組成。
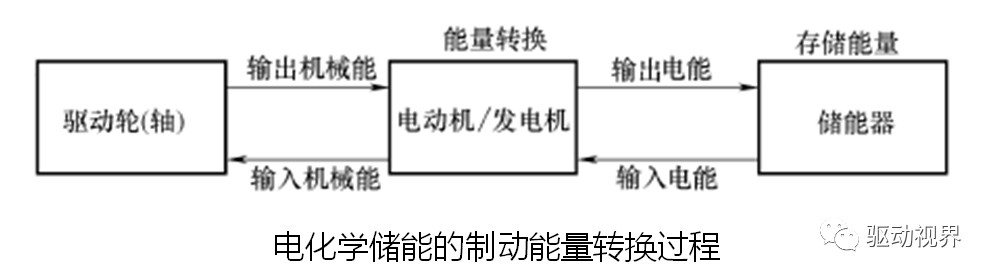
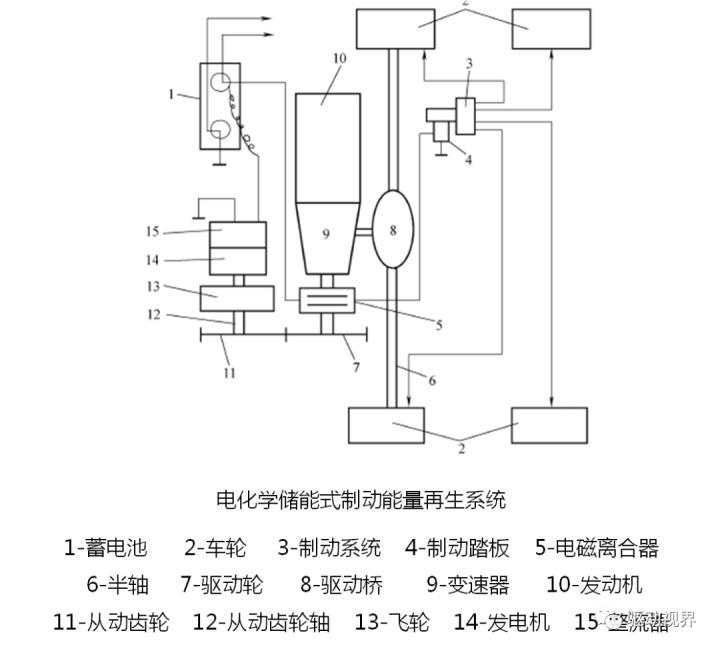
3.電化學(xué)儲(chǔ)能
其工作原理是:首先將車輛在制動(dòng)或減速過程中的動(dòng)能,通過發(fā)電機(jī)轉(zhuǎn)化為電能并以化學(xué)能的形式存儲(chǔ)在儲(chǔ)能器中;當(dāng)車輛需要起動(dòng)或加速時(shí),再將存儲(chǔ)器中的化學(xué)能通過電動(dòng)機(jī)轉(zhuǎn)化為車輛行駛的動(dòng)能。
一種用于前輪驅(qū)動(dòng)轎車的電化學(xué)儲(chǔ)能式制動(dòng)能量再生系統(tǒng)如圖所示。
2. 電動(dòng)汽車制動(dòng)模式
2.1 汽車的制動(dòng)要求及電動(dòng)汽車的復(fù)合制動(dòng)
1.汽車的制動(dòng)要求
一方面,在緊急制動(dòng)狀態(tài)下,必須有足夠的制動(dòng)力,能使汽車在最短可能的距離中停止;
另一方面,必須滿足汽車的操控穩(wěn)定性要求,即要保證駕駛?cè)藢?duì)汽車方向的控制,不能失控。
2.電動(dòng)汽車的復(fù)合制動(dòng)
電動(dòng)機(jī)制動(dòng)的方法可分為機(jī)械制動(dòng)和電氣制動(dòng)兩大類。電氣制動(dòng)又可分為反接制動(dòng)、能耗制動(dòng)和回饋發(fā)電制動(dòng)三種形式,其中的回饋發(fā)電制動(dòng)(即再生制動(dòng))就是制動(dòng)能量回收的最有效方法。
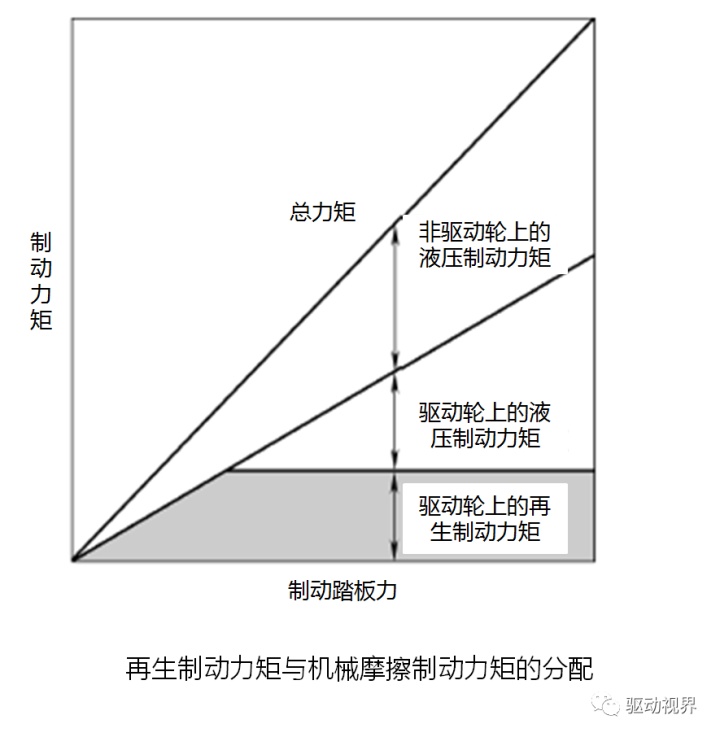
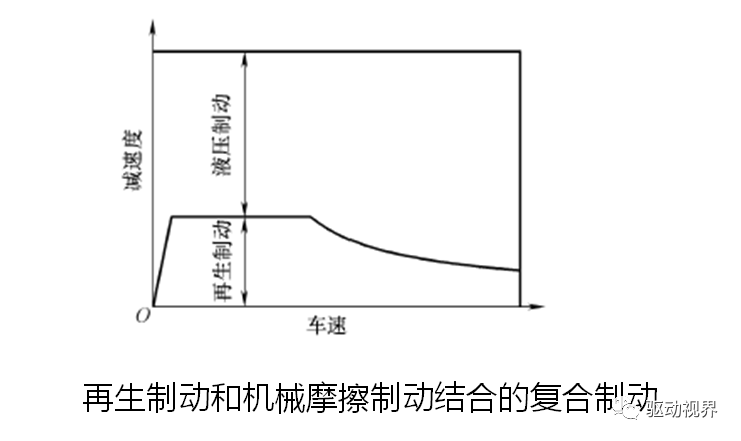
另一方面,從電動(dòng)汽車的角度來看,再生制動(dòng)產(chǎn)生的制動(dòng)力矩通常不能像傳統(tǒng)燃油車中的制動(dòng)系統(tǒng)一樣提供足夠的制動(dòng)減速度。圖示了再生制動(dòng)與機(jī)械摩擦制動(dòng)結(jié)合的復(fù)合制動(dòng)系統(tǒng)情況。
2.2 電動(dòng)汽車的制動(dòng)模式
1.急剎車
急剎車對(duì)應(yīng)于制動(dòng)減速度大于2m/s2的過程。
2.中輕度剎車
中輕度剎車對(duì)應(yīng)于汽車在正常工況下的制動(dòng)過程,可分為減速過程與停止過程。
3.汽車下長坡時(shí)的剎車
汽車下長坡一般發(fā)生在盤山公路下緩坡時(shí)。在制動(dòng)力要求不大時(shí),可完全由電剎車提供。其充電特點(diǎn)表現(xiàn)為回饋電流較小但充電時(shí)間較長。限制因素主要為電池的電荷狀態(tài)和接受能力。
2.3 電動(dòng)汽車制動(dòng)能力收回要求
(1)滿足制動(dòng)的安全要求,符合駕駛時(shí)的制動(dòng)習(xí)慣
(2)考慮驅(qū)動(dòng)電動(dòng)機(jī)的發(fā)電工作特性和輸出能力
(3)確保電池組在充電過程中的安全,防止過充
由以上分析可發(fā)現(xiàn)電動(dòng)汽車制動(dòng)能量的回收約束條件為:①根據(jù)電池放電深度,即電池的荷電狀態(tài)SOC的不同,電池可接受的最大充電電流;②電池可接受的最大充電時(shí)間;③能量回收停止時(shí)電動(dòng)機(jī)轉(zhuǎn)速,以及與此相對(duì)應(yīng)的充電電流值。
3. 永磁電動(dòng)機(jī)再生制動(dòng)
3.1 制動(dòng)能量回收基本原理
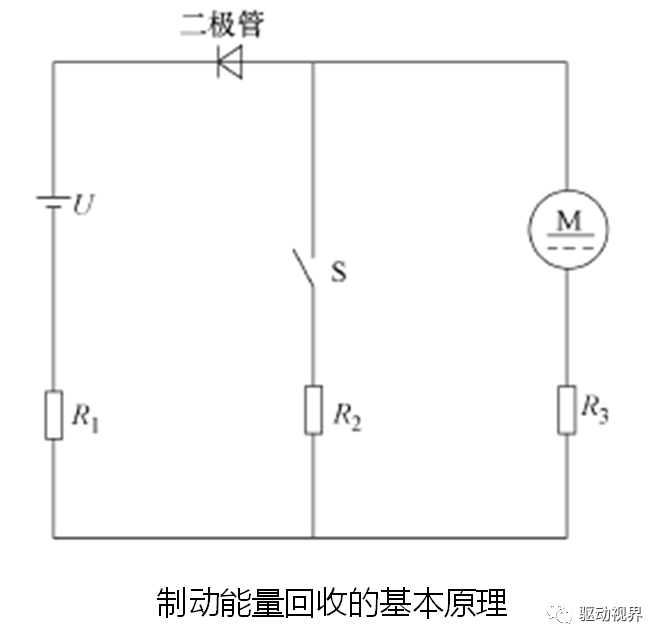
再生制動(dòng)系統(tǒng)的發(fā)電電壓總是低于蓄電池的電壓,為了使再生制動(dòng)產(chǎn)生的電能存儲(chǔ)在儲(chǔ)能裝置中,必須采用電子制動(dòng)控制系統(tǒng)使電機(jī)工作于發(fā)電狀態(tài)。制動(dòng)能量回收的基本原理如圖所示。

3.2 永磁電機(jī)再生制動(dòng)電路
電動(dòng)汽車所用的永磁電動(dòng)機(jī)一般為永磁直流電動(dòng)機(jī)和永磁交流電動(dòng)機(jī)。永磁直流電動(dòng)機(jī)和永磁交流電動(dòng)機(jī)本質(zhì)統(tǒng)一,永磁交流電動(dòng)機(jī)常等效成相應(yīng)的直流電動(dòng)機(jī)進(jìn)行分析。
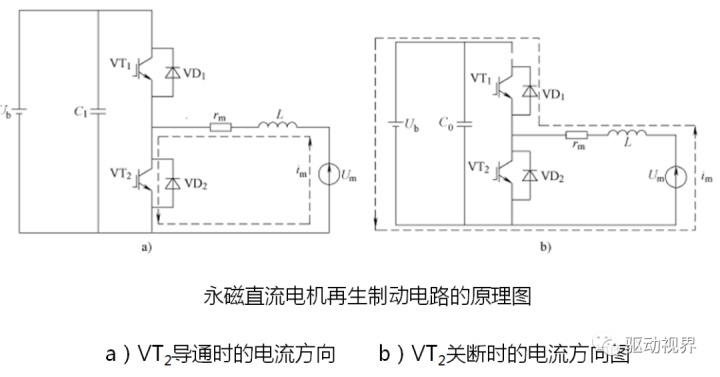
永磁直流電動(dòng)機(jī)再生制動(dòng)電路原理圖如圖所示。
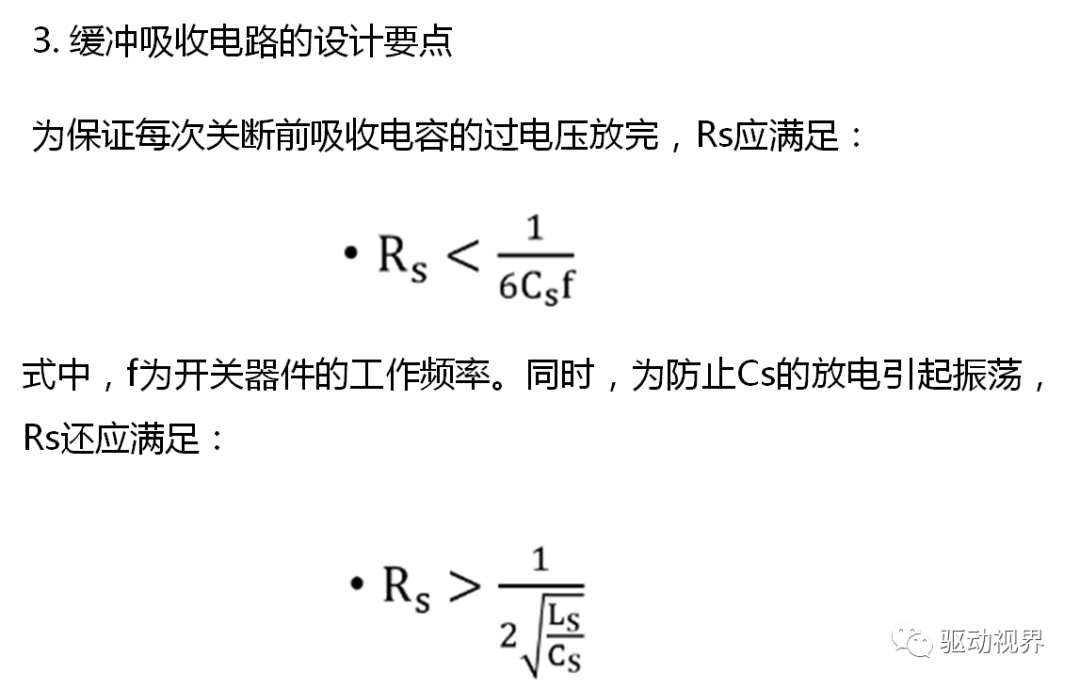
3.3 IGBT緩沖吸收電路的設(shè)計(jì)主要考慮以下幾個(gè)方面:
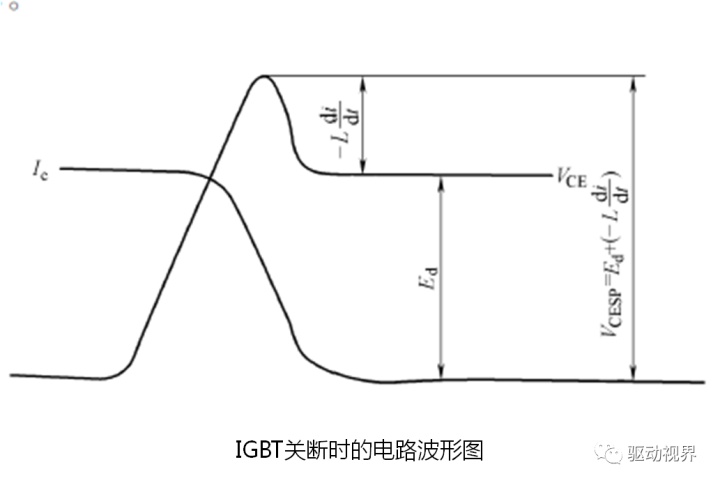
1. 過電壓產(chǎn)生的原因
大功率IGBT使用的驅(qū)動(dòng)電路板上一般提供IGBT的驅(qū)動(dòng)電路、過電流保護(hù)、軟降柵壓和軟關(guān)斷驅(qū)動(dòng)保護(hù)電路,這些保護(hù)措施是一種逐個(gè)脈沖保護(hù)。該-di/dt在主回路的布線上引起較大的-Ldi/dt,如圖所示。
2. 緩沖吸收電路的工作原理
抑制過電壓的有效方法是采用緩沖吸收電路(Snubber Circuit)。IGBT的關(guān)斷緩沖吸收回路分為充放電型和放電阻止型兩類。
阻止型高效緩沖吸收電路有三種類型:C型放電阻止型、RCD型放電阻止型和雙RCD型放電阻止型吸收回路,如圖所示。
3.4 永磁電機(jī)再生制動(dòng)策略
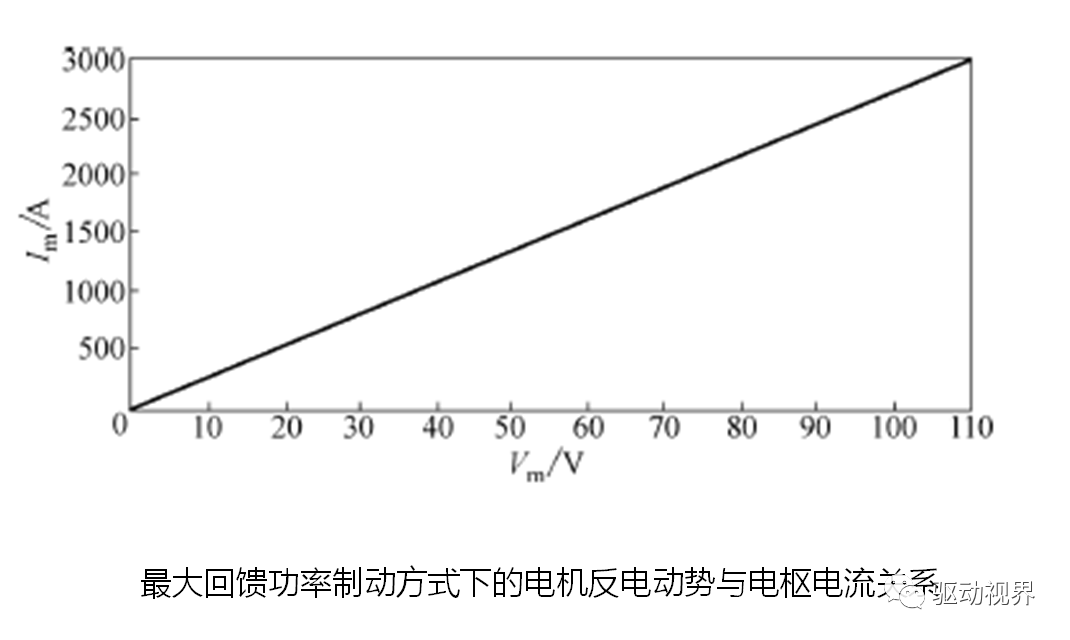
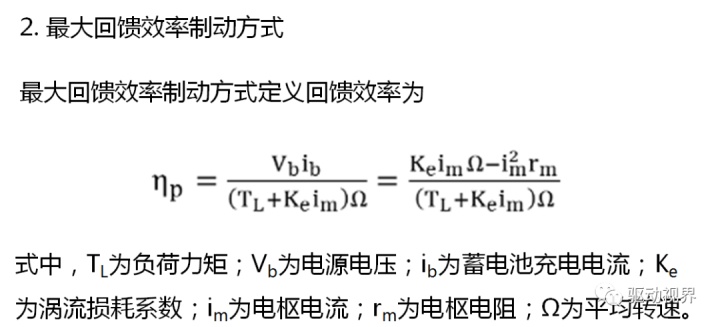
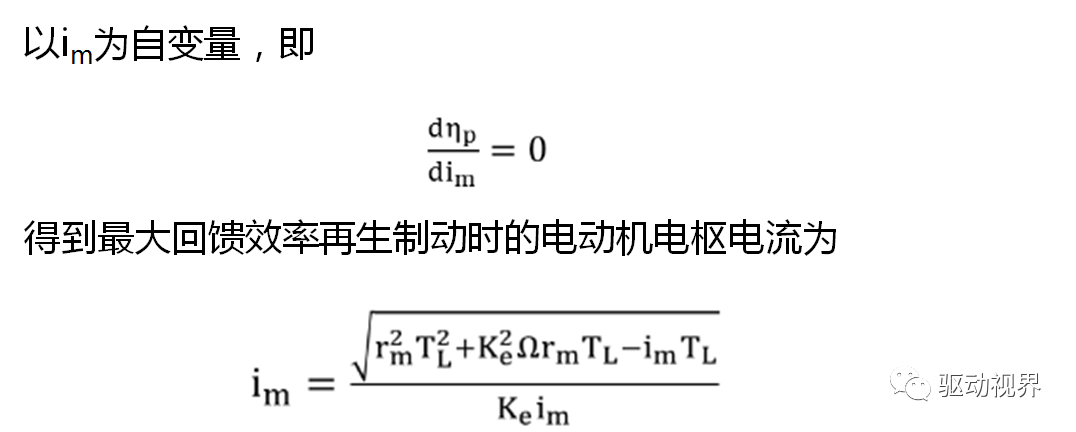
1.最大回饋功率制動(dòng)方式

3.恒定力矩制動(dòng)方式
在制動(dòng)力矩(電樞電流)不變的情況下,回饋到電池的電流將隨電動(dòng)機(jī)反電動(dòng)勢的降低而減小,其初始值(也是最大值)不應(yīng)超過電池允許充電電流,否則在制動(dòng)過程中能最不能得到有效的回收。
4. 恒定充電電流制動(dòng)方式
電動(dòng)機(jī)初始反電動(dòng)勢為100V,電池電壓為120V,蓄電池充電電流為40A情況下的蓄電池充電電流ib和電動(dòng)機(jī)電樞電流im的關(guān)系。由圖可知,控制系統(tǒng)在車輛制動(dòng)過程中維持電池充電電流40A,而隨著車輛的減速,電動(dòng)機(jī)反電動(dòng)勢持續(xù)下降,電樞電流持續(xù)上升,其峰值達(dá)到130A左右。

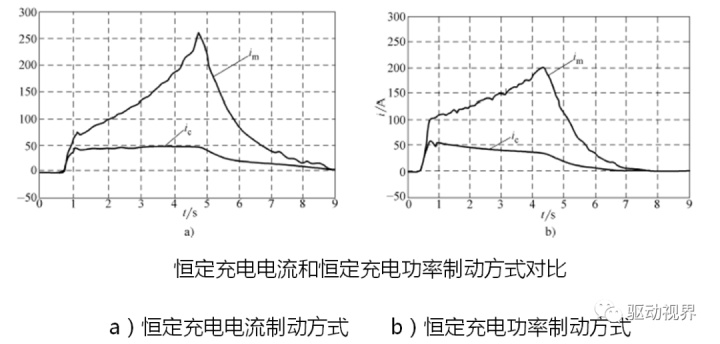
5. 恒定充電功率制動(dòng)方式
復(fù)合電源系統(tǒng),分別采用恒定充電電流和恒定充電功率制動(dòng)方式下的超級(jí)電容充電電流和電樞電流實(shí)測結(jié)果。和恒定充電電流制動(dòng)方式相比,恒定充電功率制動(dòng)方式更實(shí)用,而且由于蓄電池端電壓變化緩慢,其充電電流恒等效于充電功率恒定,因此可以說恒定充電電流制動(dòng)方式是恒定充電功率制動(dòng)方式在以蓄電池作為電動(dòng)機(jī)回饋能量儲(chǔ)存器件的系統(tǒng)中的一個(gè)實(shí)例。
4. 前后輪的制動(dòng)功率和制動(dòng)能量
4.1 電動(dòng)汽車制動(dòng)力的分類
通常有再生制動(dòng)的電動(dòng)汽車還存在機(jī)械制動(dòng)系統(tǒng),其制動(dòng)系統(tǒng)是機(jī)械和再生制動(dòng)(電制動(dòng))的復(fù)合。
它們之間的分配比例關(guān)系可以用圖來表示,這只是一種三者之間的分配關(guān)系,目的是保持最大的再生制動(dòng)力矩的同時(shí)為駕駛?cè)颂峁┡c燃油車相同的制動(dòng)感。
4.2 理想的前后輪制動(dòng)力分配
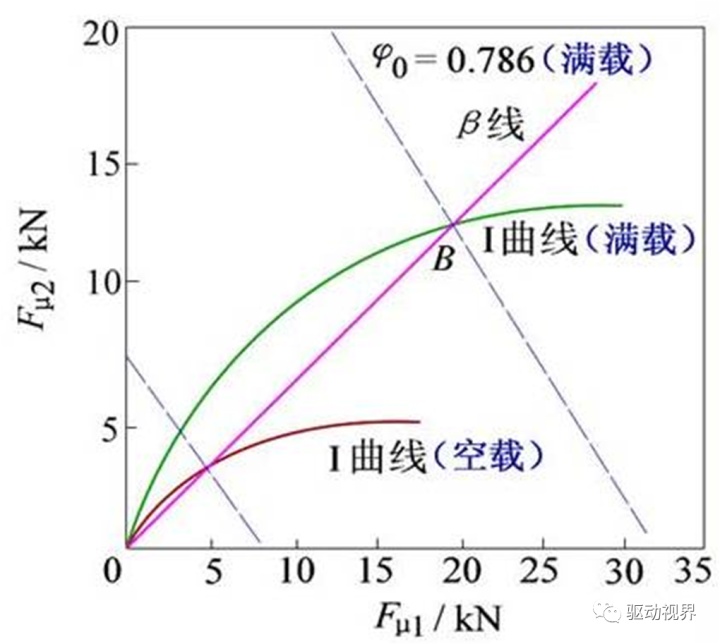
由汽車設(shè)計(jì)理論可知,前、后輪同時(shí)抱死拖滑時(shí)附著條件利用得最好。當(dāng)汽車前、后車輪同時(shí)抱死時(shí),此時(shí)的前后軸車輪的制動(dòng)器制動(dòng)力Fμ1和Fμ2是理想的前、后輪制動(dòng)器制動(dòng)力,并且是輪胎與地面間的附著系數(shù)φ的函數(shù)。以理想的前、后輪制動(dòng)器制動(dòng)力Fμ1和Fμ2為坐標(biāo)繪制Fμ1和Fμ2的關(guān)系曲線,即為理想的前、后輪制動(dòng)器制動(dòng)力分配曲線,簡稱I曲線。
4.3 前后輪的制動(dòng)功率和能量
假定在最初前后輪上的制動(dòng)力分布遵循I曲線,并忽略不及阻力,則施加于前后輪上的制動(dòng)力可表達(dá)為

式中,j為車輛的負(fù)加速度(m/s2);L為車輛的輪距;La和Lb分別為車輛重心至前后輪中心之間的水平距離;hg為車輛重心至地面的高度,m為電動(dòng)汽車質(zhì)量。
按FTP75市區(qū)循環(huán)運(yùn)行的車輛的車速及其加/減速度。

這一實(shí)例的參數(shù)為L=2.7m,La=0.4L,Lb=0.6L和hg=0.55m。從圖中可以看出:
1)前輪消耗約65%的總制動(dòng)功率和能量,因此,若僅在一個(gè)軸上實(shí)施再生制動(dòng),則在前輪上的再生制動(dòng)比后輪上的再生制動(dòng)將更為有效。
2)在車速小于50km/h的范圍內(nèi),制動(dòng)力幾乎為一恒值,且當(dāng)車速大于40km/h時(shí),其值減小。
3)從汽車?yán)碚撝R(shí)可知,如果前輪先于后輪抱死,雖然失去了轉(zhuǎn)向能力,但整車還是穩(wěn)定的;如果后輪先于前輪抱死,將導(dǎo)致整車失去控制,極易發(fā)生嚴(yán)重交通事故。

5. 電動(dòng)汽車的制動(dòng)系統(tǒng)
電動(dòng)汽車的再生制動(dòng)給制動(dòng)系統(tǒng)的設(shè)計(jì)添加了一些復(fù)雜性,呈現(xiàn)出兩個(gè)基本問題:一是如何在再生制動(dòng)和機(jī)械摩擦制動(dòng)之間分配所需的總制動(dòng)力,以回收盡可能多的車輛的動(dòng)能;二是如何在前后輪軸上分配總制動(dòng)力,以實(shí)現(xiàn)穩(wěn)定的制動(dòng)狀態(tài)。
5.1 電動(dòng)汽車制動(dòng)能量回收系統(tǒng)的結(jié)構(gòu)
電動(dòng)汽車制動(dòng)能量回收系統(tǒng)主要由兩部分組成:電機(jī)再生制動(dòng)部分和傳統(tǒng)液壓摩擦制動(dòng)部分。所以,該制動(dòng)系統(tǒng)可以視為機(jī)電復(fù)合制動(dòng)系統(tǒng)。
電動(dòng)汽車的制動(dòng)系統(tǒng)為雙回路液壓制動(dòng)系統(tǒng)+電動(dòng)真空助力+電機(jī)再生制動(dòng)。
電動(dòng)汽車的制動(dòng)助力采用電動(dòng)真空助力,保證踏板力符合習(xí)慣大小,同時(shí)具有一定的制動(dòng)腳感。
制動(dòng)過程中,制動(dòng)控制器根據(jù)制動(dòng)踏板的開度(實(shí)際為主缸壓力),判斷整車的制動(dòng)強(qiáng)度,確定相應(yīng)的摩擦制動(dòng)和再生制動(dòng)的分配關(guān)系。
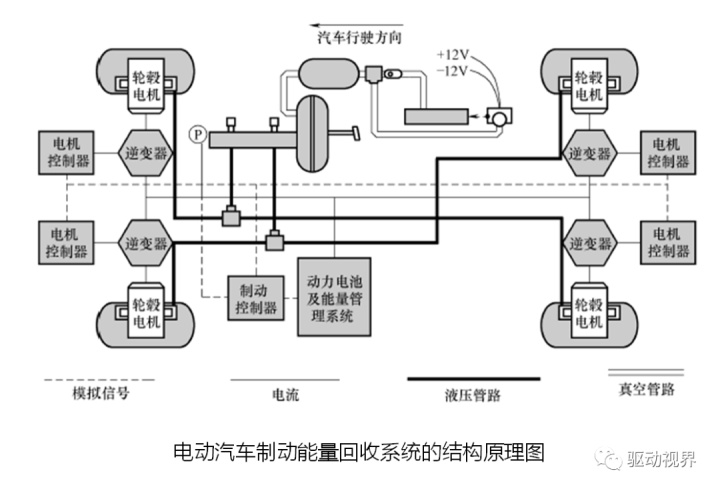
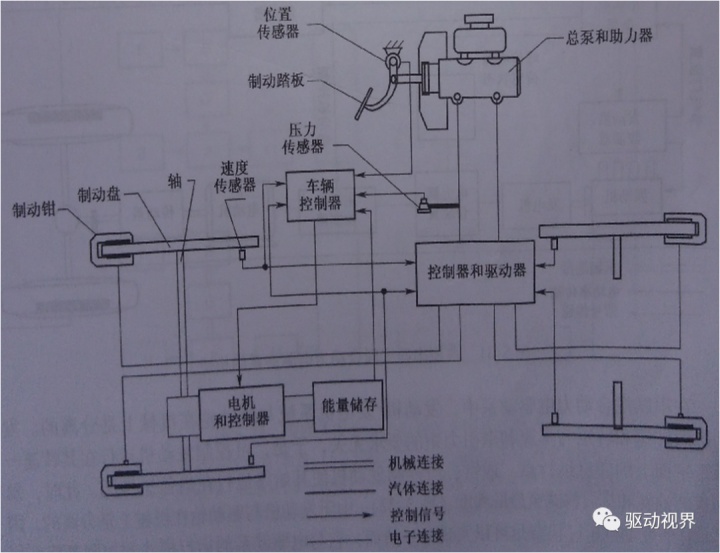
5.2 電動(dòng)汽車制動(dòng)能量回收系統(tǒng)的原理
電動(dòng)汽車制動(dòng)能量回收系統(tǒng)的結(jié)構(gòu)原理圖,如圖所示。電動(dòng)汽車的制動(dòng)過程是由液壓摩擦制動(dòng)與電機(jī)再生制動(dòng)協(xié)調(diào)作用完成的。再生制動(dòng)系統(tǒng)主要是由輪轂電機(jī)、電機(jī)控制器、逆變器、制動(dòng)控制器和動(dòng)力蓄電池等主要部件組成。制動(dòng)能量回收的實(shí)現(xiàn)過程如下:
1)在制動(dòng)開始時(shí),能量管理系統(tǒng)將動(dòng)力蓄電池SOC值發(fā)送給制動(dòng)控制器,當(dāng)SOC>0.8時(shí),取消能量回收;當(dāng)0.7≤SOC≤0.8時(shí),制動(dòng)能量回收受電池允許的最大充電電流制約;當(dāng)SOC<0.7時(shí),制動(dòng)能量回收不受電池允許的最大充電電流制約。
2)制動(dòng)控制器接收由壓力傳感器傳送的主缸壓力信號(hào),并計(jì)算出需求的電機(jī)再生制動(dòng)強(qiáng)度上限。
3)制動(dòng)控制器根據(jù)電動(dòng)機(jī)轉(zhuǎn)速,計(jì)算電機(jī)實(shí)際能夠提供的制動(dòng)強(qiáng)度。
4)比較需求的電機(jī)再生制動(dòng)強(qiáng)度上限和電機(jī)實(shí)際能夠提供的制動(dòng)強(qiáng)度,并將結(jié)果作為電信號(hào)發(fā)送給電機(jī)控制器。
5)此時(shí)的電動(dòng)機(jī)工作在發(fā)電機(jī)狀態(tài)下,可以提供電壓恒定流向的電流,再通過逆變器限制電機(jī)產(chǎn)生的最高電壓和對(duì)電壓進(jìn)行升壓,以便滿足電流輸出要求,充到動(dòng)力蓄電池組中。
6)為了保護(hù)電池,能量管理系統(tǒng)需要時(shí)刻監(jiān)測電池溫度,溫度過高則停止制動(dòng)能量回收。
5.3 電動(dòng)汽車制動(dòng)能量回收控制策略
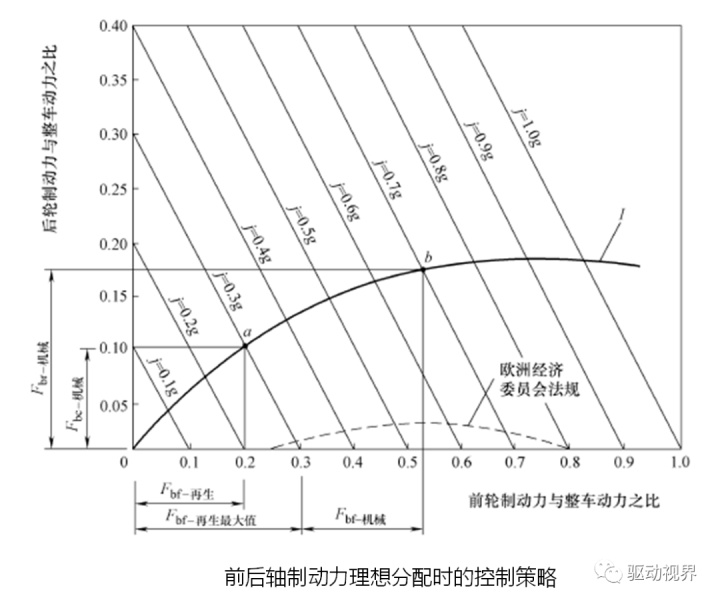
1. 前后軸制動(dòng)力理想分配時(shí)的控制策略
如圖所示,當(dāng)給出的減速指令(由制動(dòng)踏板提供)小于0.2g設(shè)定值時(shí),僅電機(jī)再生制動(dòng)系統(tǒng)工作,它模擬了傳動(dòng)車輛中發(fā)動(dòng)機(jī)延遲點(diǎn)火作用。隨著制動(dòng)減速度逐漸增大,前后軸制動(dòng)力將被控制在理想制動(dòng)力分配曲線(I曲線上)。
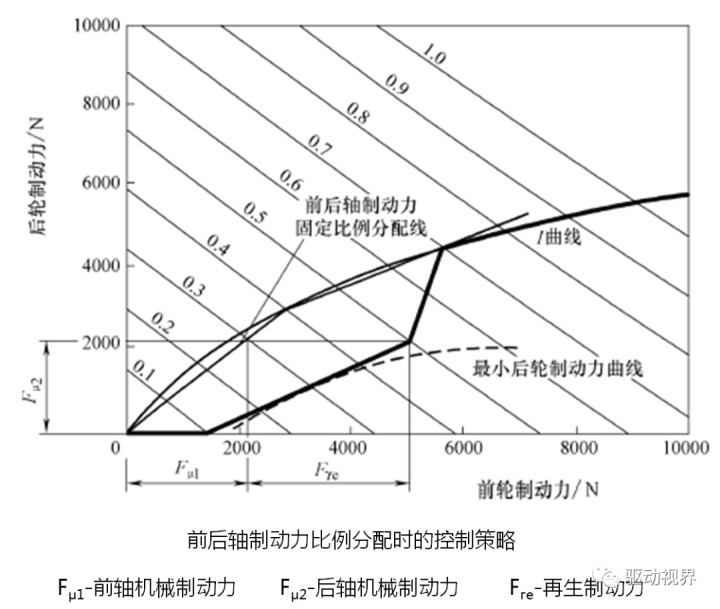
2. 前后軸制動(dòng)力比例分配時(shí)的控制策略
并聯(lián)制動(dòng)控制策略如圖所示。需要的總制動(dòng)力較小時(shí),全部由再生制動(dòng)力提供;當(dāng)需要的減速度增大時(shí),電機(jī)再生制動(dòng)力所占的比例逐漸減小,機(jī)械制動(dòng)力開始起作用;當(dāng)總制動(dòng)力大于一定值時(shí)意味著這是一個(gè)緊急制動(dòng),再生制動(dòng)力減小到零,機(jī)械制動(dòng)提供所有的制動(dòng)力;當(dāng)所需的制動(dòng)減速度在兩者之間時(shí),再生制動(dòng)與機(jī)械制動(dòng)共同作用。
3. 最優(yōu)能量回收控制策略
在對(duì)應(yīng)于給負(fù)加速度指令的總制動(dòng)力情況下,盡可能多地回收制動(dòng)能量。當(dāng)給出的減速度率指令j/g比路面附著系數(shù)μ小得多,且再生制動(dòng)力滿足要去時(shí),只應(yīng)用再生制動(dòng),而無需在前后輪施加機(jī)械制動(dòng)。

4. ABS防抱死制動(dòng)策略
具有ABS防抱死制動(dòng)策略在混合動(dòng)力再生制動(dòng)能量回收中具有較大優(yōu)勢,尤其是在四個(gè)車輪上都安置有電動(dòng)機(jī)的車輛。圖概念性地展示了防抱死制動(dòng)系統(tǒng)功能的再生制動(dòng)系統(tǒng)圖。它效仿了傳統(tǒng)的制動(dòng)系統(tǒng)的控制感受。當(dāng)接收到制動(dòng)信號(hào)后,總制動(dòng)器單元將根據(jù)牽引電動(dòng)機(jī)的特性和控制法則,給出前后輪的制動(dòng)轉(zhuǎn)矩、再生制動(dòng)轉(zhuǎn)矩和機(jī)械制動(dòng)轉(zhuǎn)矩。
電動(dòng)汽車三種常見再生制動(dòng)控制策略進(jìn)行比較結(jié)構(gòu)

點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 108



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
