




 廣告
廣告





















































算力功耗仍是高級別智能駕駛重大挑戰(zhàn)
2021-12-20 14:37:15· 來源:賽博汽車

自動駕駛企業(yè)越來越“腳踏實地”,商業(yè)化落地大幕逐步開啟。作者 | 章漣漪“從算力上來看,當前領(lǐng)先的半導體公司如英偉達、英特爾和高通,包括國內(nèi)的一些芯片公
自動駕駛企業(yè)越來越“腳踏實地”,商業(yè)化落地大幕逐步開啟。
作者 | 章漣漪
“從算力上來看,當前領(lǐng)先的半導體公司如英偉達、英特爾和高通,包括國內(nèi)的一些芯片公司,已發(fā)布具有足夠支撐L4級別自動駕駛的算力的產(chǎn)品。但算力功耗仍然是一個非常重大的挑戰(zhàn),已發(fā)布的L4 級自動駕駛芯片需消耗約1千瓦電力?!?/span>
2021年12月18日,《電動汽車觀察家》和《賽博汽車》聯(lián)合主辦的2022電觀大會在線上舉辦。會上,羅蘭貝格合伙人袁文博在演講中提及上述內(nèi)容。他認為,自動駕駛行業(yè)目前已達到技術(shù)路線圖的關(guān)鍵里程碑,但還未達到商業(yè)化拐點。【會議視頻回放可在《賽博汽車》公眾號后臺獲取,回復:電觀大會2022】
除此之外,袁文博還結(jié)合政策、消費者、技術(shù)、生態(tài)圈等多角度,就智能駕駛發(fā)展現(xiàn)狀與趨勢、智能駕駛生態(tài)化演進,以及智能駕駛產(chǎn)品化落地趨勢等進行了詳細的介紹。
01、2025年L4+L3比例將超過20%
自動駕駛經(jīng)歷了近10年高速發(fā)展,經(jīng)歷了“資本的狂歡”,也經(jīng)歷了第一次“期望的幻滅”?!痹牟┲赋?,過去的發(fā)展和經(jīng)歷也讓自動駕駛產(chǎn)業(yè)鏈各類型玩家在“仰望星空”的同時,越來越“腳踏實地”,商業(yè)化落地大幕逐步開啟。
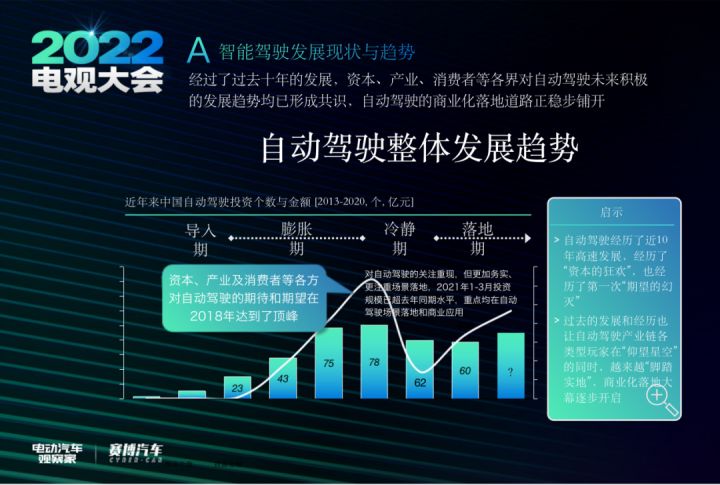
Δ 自動駕駛投資數(shù)量呈現(xiàn)階段性特性
“實際上,自動駕駛的投資數(shù)量是階段性的,最早大概在2017年至2018年達到高峰,進入膨脹期?!痹牟┱J為,自動駕駛落地離不開新能源市場的發(fā)展,單靠一條賽道,可能沒辦法將商業(yè)模式跑通。
而隨著自動駕駛賽道逐步落地,進入生態(tài)構(gòu)建環(huán)節(jié),不止初創(chuàng)公司,越來越多的包括主機廠、零部件等公司,也在加大投入。從數(shù)據(jù)來看,今年我國智能網(wǎng)聯(lián)(包括L1和L2)功能新車滲透率比例,已經(jīng)接近50%。
在袁文博看來,5G技術(shù)的廣泛應用、人工智能技術(shù)提升、大數(shù)據(jù)技術(shù)的普及與新能源汽車的市場涌入,推動了中國智能網(wǎng)聯(lián)市場的高速拓展。因此,袁文博預判,到2025年,L4+L3的比例將超過20%。

Δ 今年我國L1+L2級新車滲透率接近50%
羅蘭貝格對未來智能駕駛的發(fā)展充滿信心。
首先,從政策角度來看,全球范圍內(nèi)自動駕駛相關(guān)政策都在逐步開放并支持商業(yè)化落地。而中國,無論是國家層面,還是廣州、北京、上海等地方政府,都制定了車聯(lián)網(wǎng)建設(shè)相關(guān)指南。國家層面加強頂層設(shè)計,地方層面強化政策供給,企業(yè)層面打造產(chǎn)品供應,呈現(xiàn)三級聯(lián)動的發(fā)展態(tài)勢。
“自動駕駛從政策上來說,國家也給了一個非常明確的目標。”袁文博指出,中國已通過頂層規(guī)劃設(shè)立了到2025年實現(xiàn)L4級別自動駕駛的目標,國務院總領(lǐng)自動駕駛產(chǎn)業(yè)實現(xiàn),各部委基于各自職能設(shè)立具體的自動駕駛產(chǎn)業(yè)目標。整體而言,中國L4級別自動駕駛預計在2025年實現(xiàn)初步商業(yè)化。
其次,從消費者角度來看,全球消費者對于以Robotaxi為代表的高級智能駕駛商業(yè)化應用的偏好在過去幾年逐步上升,中國消費者的積極程度尤為突出。
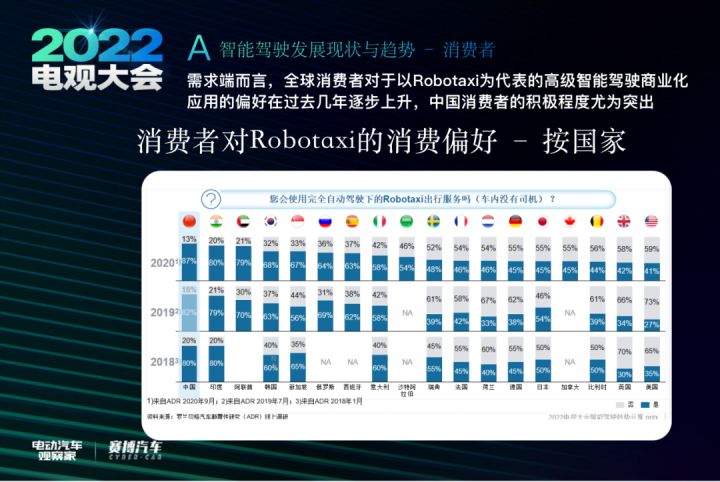
Δ 中國消費者對Robotaxi接受度最高
“羅蘭貝格通過歷年調(diào)研對比發(fā)現(xiàn),中國消費者對Robotaxi偏好是最高的,能達到80%以上,尤其到是2020年達到87%的比例?!痹牟┍硎?,中國消費者相比歐美等國家,更愿意嘗試Robotaxi。
再次,從技術(shù)角度來看,羅蘭貝格根據(jù)全球汽車相關(guān)技術(shù)專利追蹤分析表明,智能駕駛相關(guān)的專利占比近年來不斷上升,凸顯產(chǎn)業(yè)在技術(shù)層面的不斷突破探索。
以算力作為比較,L4級自動駕駛汽車的算力大約需要300–1000TOPS,L5級自動駕駛汽車的算力大約需要2000–4000TOPS,而當前領(lǐng)先的半導體公司(如英偉達、英特爾和高通),包括國內(nèi)的一些芯片公司已發(fā)布具有足夠支撐L4級別自動駕駛的算力的產(chǎn)品。
不過,袁文博提出了另一個問題:能耗。他指出,算力功耗仍然是一個非常重大的挑戰(zhàn),已發(fā)布的L4級自動駕駛芯片需消耗約1千瓦電力。因此在他看來,目前已達到技術(shù)路線圖的關(guān)鍵里程碑,但還未達到商業(yè)化拐點。
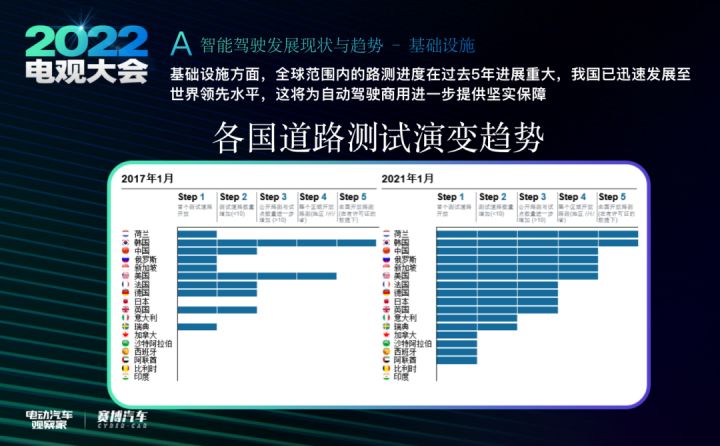
Δ 我國自動駕駛基礎(chǔ)設(shè)施建設(shè)發(fā)展迅速
最后,從基礎(chǔ)設(shè)施角度來看,全球范圍內(nèi)的路測進度在過去5年進展重大,我國已迅速發(fā)展至世界領(lǐng)先水平,這將為自動駕駛商用進一步提供堅實保障。
02、一級供應商存在本土替代趨勢
在討論智能駕駛生態(tài)化演進前,袁文博先為大家描繪了一幅:2035年以后的產(chǎn)業(yè)格局。在其中可以發(fā)現(xiàn),自動駕駛汽車將逐步走向主流,L4/L5高等級自動駕駛滲透率提升。屆時,汽車產(chǎn)業(yè)將形成完全以用戶出行訴求為核心的四大圈層全新生態(tài)體系,而自動駕駛作為最具顛覆性的技術(shù)將貫穿其中。

Δ 羅蘭貝格“2035年及以后的產(chǎn)業(yè)終局”
第一層是出行層,短期內(nèi)私家車的智能化提升將在泊車、高速等場景下率先落地,長期Robotaxi將顛覆出行;第二層是載體層,整車的研發(fā)制造和零部件的生產(chǎn),必須考慮自動駕駛的影響,而產(chǎn)品化落地將成為關(guān)鍵;第三層是服務層,基于高級自動駕駛的數(shù)據(jù)、安全、平臺和應用等要素將進一步豐富服務;第四層是基建層,地圖與通信將保障高級別自動駕駛的充分冗余,而自動駕駛將反哺交通,行車綠色智慧交通體系。
上述圈層內(nèi)主要有五大生態(tài)玩家,包括出行服務提供商、整車制造企業(yè)、零部件供應商、交通基建服務商,以及互聯(lián)網(wǎng)巨頭。各圈層玩家開始以終為始加速布局,而考慮到自動駕駛技術(shù)之復雜與投入之巨大,生態(tài)體系的構(gòu)建成為各玩家自動駕駛商業(yè)化演進的必然選擇。
以出行服務提供商為例。袁文博指出,在與多家公司交流后發(fā)現(xiàn),出行服務提供商其實有三個大的轉(zhuǎn)變。一是在不斷找場景,不再單純把道路作為唯一的目標,包括礦山、港口、機場等都是自動駕駛場景,且對本土公司優(yōu)勢更大,因為這些地方本身有一定的數(shù)據(jù)敏感性。
二是業(yè)務范圍和對象也在不斷拓展,除了一些特殊場景,新零售等也進入了自動駕駛公司的思考范圍。比如新石器開始提供無人車餐食服務等,這意味著其不僅僅基于原有2B場景設(shè)計,還關(guān)注到C端市場。
三是很多數(shù)據(jù)服務商與主機廠等,有了更大程度業(yè)務上的合作。
Δ 車企已經(jīng)把生態(tài)體系建設(shè)作為戰(zhàn)略發(fā)展方向
談到整車制造企業(yè)的戰(zhàn)略,袁文博認為傳統(tǒng)的OEM,包括國內(nèi)這些主機廠都在往生態(tài)戰(zhàn)略上去做轉(zhuǎn)移。無論是長城的咖啡智能生態(tài)聯(lián)盟、還是奇瑞的icar生態(tài)、東風構(gòu)建生態(tài)業(yè)務群等。
從另一個角度看,在生態(tài)圈的構(gòu)架之下,主機廠和供應商的關(guān)系有一個新的演變?!拔覀儼l(fā)現(xiàn),縱目和長安的合作是全方位長期的,而不再單是一個傳統(tǒng)項目?!痹牟┍硎?,生態(tài)體系建設(shè)已成為整車企業(yè)的戰(zhàn)略發(fā)展方向,借助產(chǎn)品的核心載體優(yōu)勢地位,整車企業(yè)積極擴張朋友圈,共創(chuàng)生態(tài)商業(yè)模式,實現(xiàn)共贏。
考慮到自動駕駛商業(yè)化挑戰(zhàn),不同玩家通過技術(shù)合作的形式實現(xiàn)能力互補,并整體加速自動駕駛的商業(yè)化。以一級供應商為例,自動駕駛實力雄厚的一級供應商主導發(fā)起自動駕駛合作聯(lián)盟,其中博世也在搭建自己的生態(tài),其自動駕駛解決方案得到了主機廠、芯片供應商、通訊服務商等的合作;其他供應商則積極尋求同其他公司開展合作,以避免商業(yè)落后。
同時,袁文博指出,智能汽車時代為國內(nèi)的一級供應商提供了更多的機會。一方面,下游不管是造車新勢力,還是傳統(tǒng)自主汽車品牌都在不斷的發(fā)展;另一方面中國本身在電子,包括激光雷達、毫米波雷達等傳感器行業(yè)中迅速的追趕,未來一級供應商存在本土取代海外的趨勢。
而在基礎(chǔ)設(shè)施服務商這一塊,袁文博稱,在依靠自身過往積累進行生態(tài)圈滲入的同時,也應與其他新進入玩家求同存異,在國家及產(chǎn)業(yè)引導下合力完善基建層生態(tài)體系。
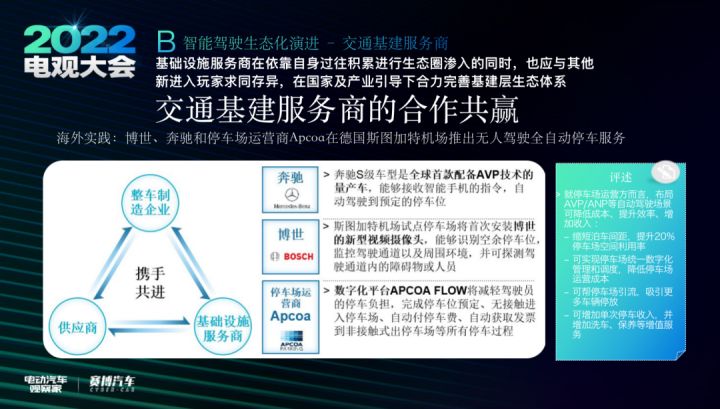
Δ 基礎(chǔ)設(shè)施服務商也在積極完善相關(guān)生態(tài)建設(shè)
他舉例稱,博世、奔馳和停車場運營商Apcoa在德國斯圖加特機場推出無人駕駛?cè)詣油\嚪铡?,就停車場運營方而言,布局AVP/ANP等自動駕駛場景可降低成本、提升效率、增加收入:縮短泊車間距,提升20%停車場空間利用率;可實現(xiàn)停車場統(tǒng)一數(shù)字化管理和調(diào)度,降低停車場運營成本;可幫停車場引流,吸引更多車輛停放;可增加單次停車收入,并增加洗車、保養(yǎng)等增值服務。
與此同時,面對蓬勃發(fā)展的汽車生態(tài),互聯(lián)網(wǎng)玩家跨界參與并通過流量優(yōu)勢、資源協(xié)同、中臺能力等快速跑馬圈地,逐步進行深度布局。袁文博認為,包括百度等互聯(lián)網(wǎng)企業(yè)對自動駕駛的發(fā)展也起到很重要的作用。
03、2025年之前停車場景會不斷發(fā)展
針對智能駕駛產(chǎn)品化落地,羅蘭貝格做了一個時間圖。它認為,在2025年之前,停車場景會不斷發(fā)展;在2028年到2030年之間,結(jié)構(gòu)化道路有望能看到Robotaxi更大規(guī)模使用;2030年以后,無人駕駛會向更多城市道路,很多場景延伸。
“大家都知道有漸進路線和跨越式路線,今天在我看來這兩線需要有效的融合的?!痹谠牟┛磥?,大家發(fā)展到一定程度會發(fā)現(xiàn),一些算法固然很重要,但是真正基于海量交通數(shù)據(jù)進行算法的演練和訓練,可能才是最關(guān)鍵的。所以,這也是為什么我認為中國自動駕駛公司離不開與OEM的合作,OEM本身也可以去擁抱生態(tài)。
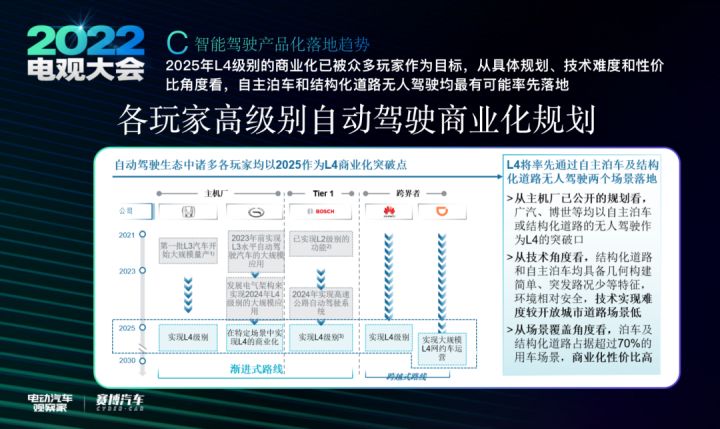
Δ L4級將率先通過自主泊車等場景落地
目前,2025年L4級別的商業(yè)化已被眾多玩家作為目標,從具體規(guī)劃、技術(shù)難度和性價比角度看,自主泊車和結(jié)構(gòu)化道路無人駕駛均最有可能率先落地。
從主機廠已公開的規(guī)劃看,廣汽、博世等均以自主泊車或結(jié)構(gòu)化道路的無人駕駛作為L4的突破口;從技術(shù)角度看,結(jié)構(gòu)化道路和自主泊車均具備幾何構(gòu)建簡單、突發(fā)路況少等特征,環(huán)境相對安全,技術(shù)實現(xiàn)難度較開放城市道路場景低;從場景覆蓋角度看,泊車及結(jié)構(gòu)化道路占據(jù)超過70%的用車場景,商業(yè)化性價比高。
自主泊車存在單車智能和車場協(xié)同兩種模式,地圖定位、安全性、場景覆蓋性等關(guān)鍵技術(shù)為國內(nèi)車企短期內(nèi)實現(xiàn)商業(yè)化的關(guān)鍵因素。
袁文博指出,在2025年前后,在復雜城市路況中占據(jù)了大多數(shù)出行里程的結(jié)構(gòu)化道路也有望初步實現(xiàn)無人駕駛,以高架、高速、封閉園區(qū)等場景為主。
他認為,結(jié)構(gòu)化道路主要有三個特征:信號燈及道路標識遵循統(tǒng)一規(guī)則,異型車及非標出行者較少,因此道路幾何特征易識別,便于高精地圖建模;道理基礎(chǔ)設(shè)施良好,路側(cè)單元容易架設(shè)及維護,易通過路基設(shè)備升級實現(xiàn)路車協(xié)同;交通參與者相對固定且遵守規(guī)則,突發(fā)異常情況較少,便于自動駕駛車輛規(guī)避危險隱患。
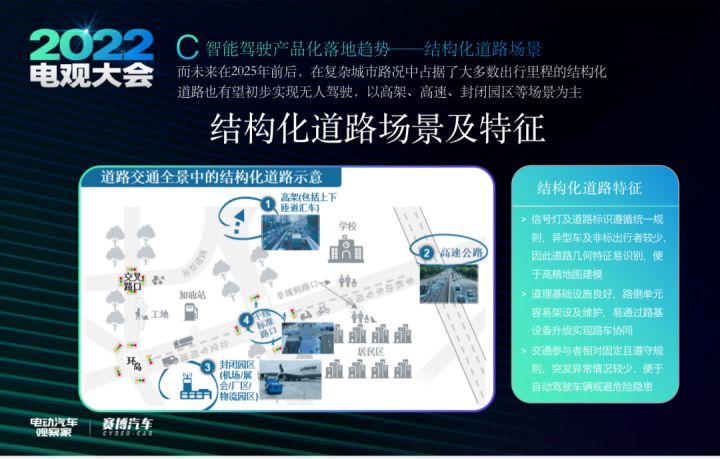
Δ 結(jié)構(gòu)化道路有三個特征
不過,袁文博也表示,結(jié)構(gòu)化道路無人駕駛也面臨著三個主要痛點和挑戰(zhàn)。一是真實多變環(huán)境下的動態(tài)目標識別。真實行駛過程中存在惡劣氣候、行駛路線上光照強度變化、能見度突變等因素,對車輛傳感器識別道路其他參與者造成困難。同時,即使標識規(guī)范的結(jié)構(gòu)化道路也會因老化而導致幾何特征難以被正確識別,兩者均需通過提升感知算法精度解決長尾問題。
二是多傳感器的融合。當自動駕駛傳感器出現(xiàn)故障后,需有設(shè)備/算法實現(xiàn)冗余,然而過度布置車端、路側(cè)傳感/計算設(shè)備將大幅增加成本1),如何在低成本下保障安全存在挑戰(zhàn)。同時在多模態(tài)駕駛?cè)蝿障?,不同傳感器間協(xié)同工作錯綜復雜,且采樣數(shù)據(jù)存在沖突時該需通過合理機制進行準確性加嚴,對傳感-決策策略的設(shè)計帶來了難度。
三是發(fā)生車禍后的倫理及法律責任主體。無人車輛駕駛中的行動者由司機變成了機器,但機器又不具備人類的能動性和反思性,因此在發(fā)生車禍后,無法作為社會行動者被法律及道德追責。
袁文博指出,目前主流法規(guī)中,德國主張駕駛監(jiān)督人負責,但難以適用高級別自動駕駛;美國主張車輛制造商負責,但在龐大的軟硬件供應鏈路中找到明確的責任公司存在困難,未來路線有待進一步觀察。



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
