




 廣告
廣告





















































谷歌Waymo自動(dòng)駕駛詳解
2021-12-21 09:31:56· 來(lái)源:汽車ECU開(kāi)發(fā)

2009年谷歌(Waymo)自動(dòng)駕駛事業(yè)正式開(kāi)始,但實(shí)際上谷歌的自動(dòng)駕駛可以追溯到2005年第二屆DARPA無(wú)人駕駛挑戰(zhàn)賽,已有了十幾年的歷史,目前也是自動(dòng)駕駛領(lǐng)域的標(biāo)桿
2009年谷歌(Waymo)自動(dòng)駕駛事業(yè)正式開(kāi)始,但實(shí)際上谷歌的自動(dòng)駕駛可以追溯到2005年第二屆DARPA無(wú)人駕駛挑戰(zhàn)賽,已有了十幾年的歷史,目前也是自動(dòng)駕駛領(lǐng)域的標(biāo)桿企業(yè),不過(guò)Waymo也經(jīng)歷了各種坎坷,包括早期領(lǐng)導(dǎo)人職業(yè)操守嚴(yán)重不足,跟車企合作被鄙視,骨干員工加入競(jìng)爭(zhēng)對(duì)手等。
Waymo在超過(guò)25個(gè)城市的公共道路上行駛了超過(guò)2000萬(wàn)英里。另外還在模擬環(huán)境中行駛了數(shù)百億英里。此外,Waymo正在美國(guó)經(jīng)營(yíng)L4自動(dòng)駕駛出租車服務(wù),真正的在沒(méi)有司機(jī)的情況下運(yùn)送乘客。
下面來(lái)梳理一下Waymo的技術(shù),以此來(lái)窺探一下頭部企業(yè)背后的實(shí)際情況。
與其他公司的自動(dòng)駕駛系統(tǒng)一樣,Waymo自動(dòng)駕駛技術(shù)主要包括:感知、定位、規(guī)劃、控制。下面分別對(duì)其進(jìn)行梳理,不過(guò)對(duì)于控制,由于其與車輛動(dòng)力學(xué)模型是強(qiáng)相關(guān)的,就不對(duì)其進(jìn)行介紹。
01.感知
感知模塊是自動(dòng)駕駛的基礎(chǔ)也是核心,其主要實(shí)現(xiàn)對(duì)障礙物距離的估計(jì),以及車輛的定位。Waymo的感知系統(tǒng)使用了攝像頭、激光雷達(dá)和雷達(dá)的組合,如圖1所示。感知模塊的大部分工作是由4個(gè)LiDAR完成的,因此其技術(shù)路線剛好與特斯拉相反。圖2為Waymo的感知系統(tǒng)處理后的視圖與原圖像。
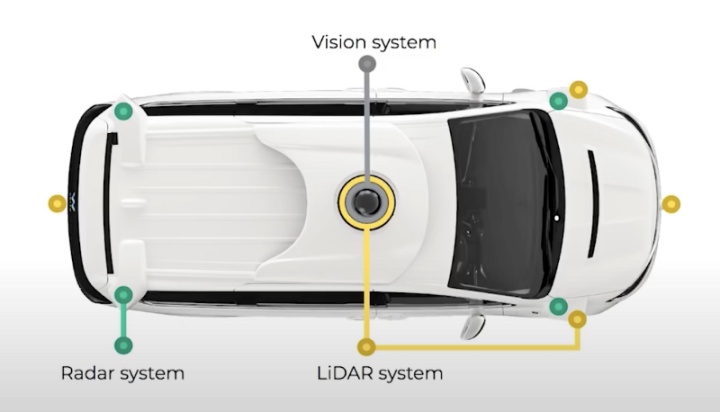
圖1 Waymo的感知系統(tǒng)
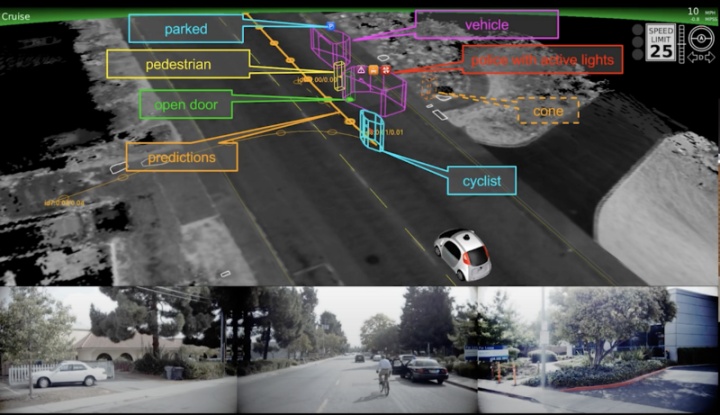
圖2 Waymo感知視圖
從圖2中可以看出,Waymo的感知系統(tǒng)獲取障礙物信息的能力非常高,包括:
1、可以識(shí)別常規(guī)汽車、警車、救護(hù)車、消防車和校車。如果遇到特種車輛,系統(tǒng)可以根據(jù)警報(bào)器和燈光做出判斷;
2、每個(gè)檢測(cè)到的障礙物都有一個(gè)狀態(tài):移動(dòng)、停車等。
在Waymo開(kāi)發(fā)感知系統(tǒng)的過(guò)程中,遇到過(guò)不少棘手的問(wèn)題,比如在車輛反射問(wèn)題,如圖3所示,不過(guò)由于感知系統(tǒng)采用了激光雷達(dá),這種發(fā)射問(wèn)題不會(huì)出現(xiàn)在激光雷達(dá)的點(diǎn)云中。

圖3 玻璃反射
另外還有一個(gè)極端問(wèn)題:如果人們可能躺在卡車車頂,舉著STOP標(biāo)志。對(duì)于這樣的問(wèn)題,感知系統(tǒng)首先會(huì)檢測(cè)STOP標(biāo)志,然后將這些信息與地圖進(jìn)行匹配,檢測(cè)地圖上此處是否有STOP標(biāo)志,是否有道路工程等,如果沒(méi)有,該標(biāo)志會(huì)被忽略。
02.架構(gòu)
最近在討論Tesla計(jì)算機(jī)視覺(jué)架構(gòu)時(shí),我探索了HydraNet 架構(gòu)。它是一種旨在同時(shí)運(yùn)行多個(gè)神經(jīng)網(wǎng)絡(luò)的架構(gòu)。“Hydra”這個(gè)詞意味著一個(gè)有多個(gè)頭的系統(tǒng)。Waymo沒(méi)有HydraNets。
Waymo的架構(gòu)并不是固定的。
圖4展示了一個(gè)神經(jīng)網(wǎng)絡(luò)架構(gòu)搜索(NAS)單元,它是神經(jīng)網(wǎng)絡(luò)的構(gòu)建塊,類似于ResNet的大型神經(jīng)網(wǎng)絡(luò)中的構(gòu)建塊。這個(gè)想法已經(jīng)被采納并改編成一種叫做 AutoML 的東西。AutoML 的思想是神經(jīng)網(wǎng)絡(luò)架構(gòu)必須由算法估計(jì),如圖5所示。

圖4 NAS單元
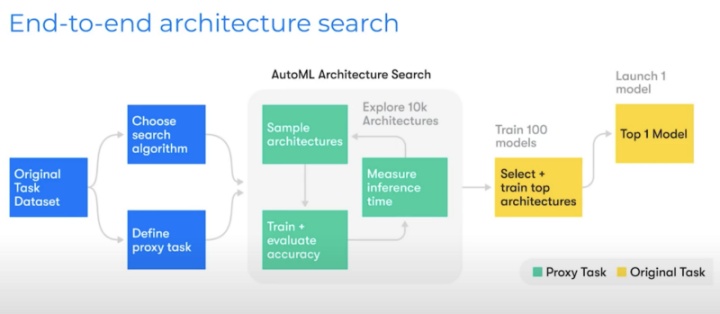
圖5 AutoML架構(gòu)
這些架構(gòu)是使用NAS單元構(gòu)建的,最佳組合獲勝。測(cè)試樣本為10000個(gè)架構(gòu),預(yù)選100個(gè)模型,然后選出1個(gè)最終獲勝者,獲勝的標(biāo)準(zhǔn)是準(zhǔn)確性和推理成本。
03.數(shù)據(jù)集和模型
關(guān)于數(shù)據(jù)集和模型,Waymo使用的是一種稱為主動(dòng)學(xué)習(xí)的過(guò)程。主動(dòng)學(xué)習(xí)的思想如下:
1、對(duì)于未標(biāo)記的數(shù)據(jù),將其發(fā)送給模型進(jìn)行預(yù)測(cè)。
2、如果模型對(duì)其預(yù)測(cè)非常確定,其將獲得一個(gè)自動(dòng)標(biāo)簽。
3、如果不確定,則將數(shù)據(jù)發(fā)送給人工標(biāo)注員。這樣,人工標(biāo)注員只標(biāo)注疑難數(shù)據(jù),其余的都是自動(dòng)標(biāo)注。
Waymo使用主動(dòng)學(xué)習(xí)來(lái)訓(xùn)練模型,利用TPU(Tensor Processing Units)和谷歌的深度學(xué)習(xí)框架TensorFlow。與特斯拉類似,這是一個(gè)閉環(huán),循環(huán)迭代。
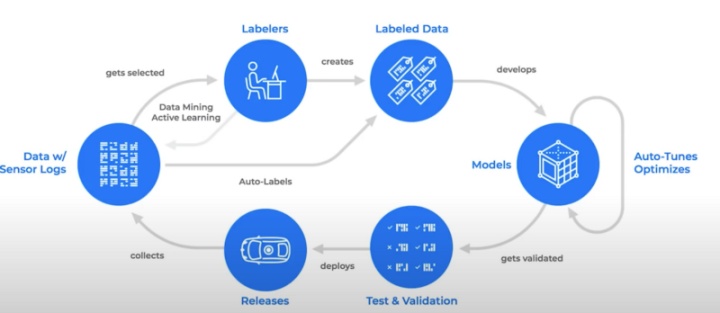
圖6 Waymo主動(dòng)學(xué)習(xí)步驟
圖6中的描述已經(jīng)比較清晰;從底部的Releases開(kāi)始,然后沿著箭頭一步一步執(zhí)行。
1、當(dāng)模型發(fā)布完成,開(kāi)售數(shù)據(jù)收集。
2、一些數(shù)據(jù)被選中并由神經(jīng)網(wǎng)絡(luò)或人工標(biāo)注員進(jìn)行標(biāo)注。
3、將標(biāo)注的數(shù)據(jù)集發(fā)送到AutoML架構(gòu)搜索,評(píng)估最佳模型。
4、最佳模型經(jīng)過(guò)驗(yàn)證、測(cè)試并發(fā)Releases新版本。
04.定位
定位很顯然就是獲取車輛的實(shí)時(shí)位置,要求精度在1~3cm。一些公司使用了GPS,或是添加了攝像頭和激光雷達(dá)信息。Waymo使用了地圖、激光雷達(dá)和GPS來(lái)定位車輛,這方面采用了從Google地圖積累的經(jīng)驗(yàn)。
多年來(lái),Google地圖團(tuán)隊(duì)一直致力于使用激光雷達(dá)、攝像頭和GPS進(jìn)行高精地圖繪制。這些傳感器正好也是用于自動(dòng)駕駛相吻合。
谷歌幾乎已經(jīng)繪制了整個(gè)世界的地圖。如果從相對(duì)位置檢測(cè)到您看到了2號(hào)街道,就可以準(zhǔn)確地知道您在哪里。這就是他們過(guò)去二十年一直在努力的事情。
Waymo的定位模塊由地圖、攝像頭、GPS和算法組成,可在全世界范圍內(nèi)準(zhǔn)確定位車輛。另外Waymo還進(jìn)行了大量冗余設(shè)計(jì),使其更加健壯、可靠。
05.預(yù)測(cè)
行為預(yù)測(cè)
Waymo自動(dòng)駕駛汽車最重要的特點(diǎn)是行為預(yù)測(cè)。在自動(dòng)駕駛汽車中,最終想要的是了解人類行為并預(yù)測(cè)。這就是所謂的行為預(yù)測(cè)。
這些行為預(yù)測(cè)是使用循環(huán)神經(jīng)網(wǎng)絡(luò)進(jìn)行的:它們使用過(guò)去的信息來(lái)預(yù)測(cè)未來(lái)的行為。因此,可以確切地知道要做什么,并且可以衡量預(yù)測(cè)的置信度。舉兩個(gè)行為預(yù)測(cè)簡(jiǎn)單的例子:
1、如果車輛觀察到有行人注視著它,則發(fā)生事故的風(fēng)險(xiǎn)很低。如果觀察到行人不注意就跑,風(fēng)險(xiǎn)會(huì)更高。
Waymo的系統(tǒng)是如何做到這一點(diǎn)的呢?其預(yù)測(cè)系統(tǒng)是一個(gè)混合體,結(jié)合了機(jī)器學(xué)習(xí)和人類知識(shí)。所謂的人類知識(shí),就是人類對(duì)世界的了解,例如交通法規(guī)和不可能的事情——人類行走或者跑步的速度不可能達(dá)到50公里/小時(shí))。
06.仿真
如文章開(kāi)頭所說(shuō),Waymo的自動(dòng)駕駛在模擬器中運(yùn)行了數(shù)百億公里,該模擬器的輸入為真實(shí)世界數(shù)據(jù)。
Waymo的仿真系統(tǒng)可以實(shí)時(shí)回放,可以模擬行為構(gòu)建完整的場(chǎng)景,并查看算法是如何表現(xiàn)的。事實(shí)上,Waymo平均每天運(yùn)行25,000輛虛擬汽車,并且在這些模擬中每天行駛1千萬(wàn)英里。
為了模擬更多場(chǎng)景,Waymo正在使用DeepMind和深度強(qiáng)化學(xué)習(xí)來(lái)創(chuàng)建代理和駕駛策略。
在強(qiáng)化學(xué)習(xí)中,策略是一種行為。其可以模擬一個(gè)憤怒的司機(jī)試圖危險(xiǎn)的切入。每次他們都會(huì)查看算法的行為和正確性。
一旦他們對(duì)駕駛員進(jìn)行了準(zhǔn)確且訓(xùn)練有素的預(yù)測(cè),就可以生成要采取的軌跡。這也稱為決策和軌跡生成。Waymo的駕駛模型稱為ChauffeurNet,如圖7所示。
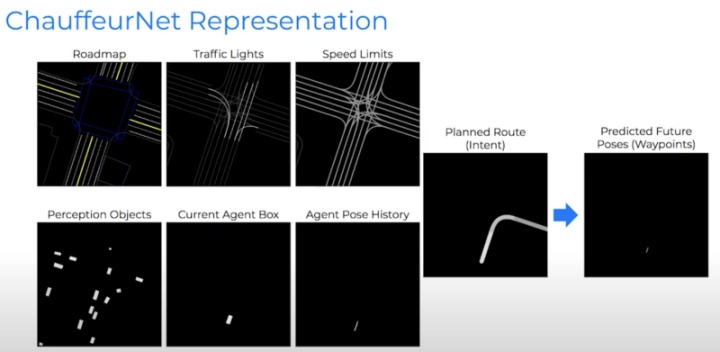
圖7 ChauffeurNet駕駛模型
07.規(guī)劃
軌跡是一系列點(diǎn)坐標(biāo)組成,其目標(biāo)是綜合來(lái)考慮安全性、速度和可行性,生成誤差最合適的軌跡。Waymo的完整規(guī)劃模塊如圖8所示。

圖8 規(guī)劃模型
Agent RNN是一個(gè)為自動(dòng)駕駛車輛生成軌跡的網(wǎng)絡(luò)。這些軌跡將考慮航向(可行性)、速度(交通規(guī)則)、航路點(diǎn)(長(zhǎng)度)等。Agent RNN的目標(biāo)是模擬一個(gè)可行的、現(xiàn)實(shí)的軌跡。
Road Mask Net用于確保生成的軌跡為動(dòng)車道,防止生成的軌跡中含有非機(jī)動(dòng)車道。
最后,軌跡還考慮了排斥器和吸引器。用于將車輛維持在車道中,避開(kāi)路障。
生成軌跡的過(guò)程還使用了逆強(qiáng)化學(xué)習(xí)技術(shù)。在逆強(qiáng)化學(xué)習(xí)中,嘗試著眼于真實(shí)的人類軌跡,并確定是什么使這條軌跡成為一個(gè)好的軌跡,這有利于改進(jìn)了生成的軌跡并使其更接近人類行為。
總結(jié)
Waymo的自動(dòng)駕駛技術(shù)積累了十幾年,而且背靠Google,可以借鑒不少地圖方面的經(jīng)驗(yàn),但是Waymo專注于L4以上的自動(dòng)駕駛開(kāi)發(fā),這一點(diǎn)從目前來(lái)看,不是大多數(shù),大部分公司先著眼于L2和L3的落地,并且逐步實(shí)現(xiàn)L4及以上。像百度之前也專注于L4及以上的開(kāi)發(fā),但是后來(lái)嘗試L2和L3的落地。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 113



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開(kāi)發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
