




 廣告
廣告





















































智能汽車區(qū)域控制器PDC功能及架構設計解決方案
2021-12-28 20:20:08· 來源:焉知 作者:Jessie

從市場趨勢而言,隨著中國乘用車市場發(fā)展趨于飽和以及終端消費群體年齡結構的變化,如何以新穎且差異化的用戶體驗,實用且高端的先進技術,打造出有市場競爭力的
從市場趨勢而言,隨著中國乘用車市場發(fā)展趨于飽和以及終端消費群體年齡結構的變化,如何以新穎且差異化的用戶體驗,實用且高端的先進技術,打造出有市場競爭力的產品,是OEM關心的重中之重;從技術趨勢而言,自動駕駛行業(yè)內都在尋求一個能滿足以下需求的全新架構:包括降低電子電氣復雜度,提高電子電氣架構效率,提升總裝生產線效率,實現(xiàn)更快速的開發(fā)和迭代,軟硬件解耦和提升終端用戶體驗等等。從這個角度上講,下一代自動駕駛系統(tǒng)趨向于從分布式過程向集中式過程實現(xiàn)統(tǒng)一架構。
1、軟件層面:整車的算法控制單元、算力需求單元要求進一步集中,功能域控制器將進一步發(fā)展形成集中式中央車載計算中心(平臺);
2、硬件層面:為了增強可擴展性、提高通信效率、減少線束長度、減少硬件實體重量,包含算法、算力、通信、功能模塊、I/O、電源等硬件資源將被重新規(guī)劃。
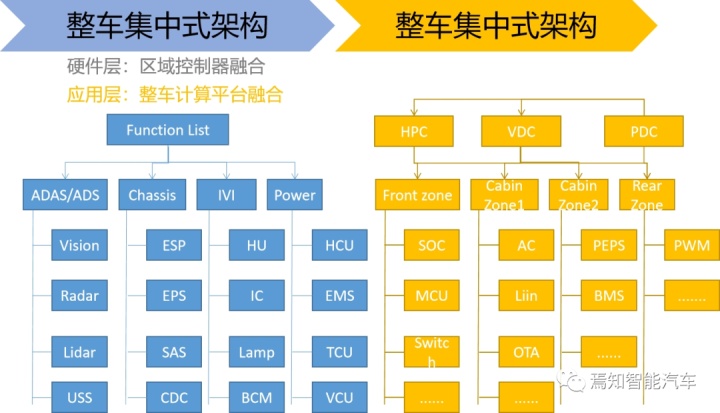
如上提到的集中式域控制器方案的實現(xiàn)并不是一蹴而就的,主要體現(xiàn)在車身單元本身具備較多的執(zhí)行器單元。包含自動駕駛域本身、智能座艙方向、智能底盤方向、原車身控制單元(統(tǒng)稱iBCM)。因此,在真正實現(xiàn)大域控的中央控制方案之前,自動駕駛系統(tǒng)會階段性的引入諸如智能座艙域控制器,智能底盤域控制器等等。如上的劃分其目的在于打破原有功能邊界,可按照區(qū)域劃分,形成區(qū)域控制器,完成功集能域架構漸進性的向整車集中式架構進化。
我們知道面向智能車輛的終極解決方案是實現(xiàn)面向服務的自動駕駛控制系統(tǒng)SOA。整體來說,車輛總體方案偏向于選用中央計算平臺+區(qū)域控制的拓撲形式,搭載車-云一體化的整車級SOA 軟件架構。而階段性的自動駕駛控制系統(tǒng)需要一種區(qū)域控制單元PDC(power data centers)對周圍的電子系統(tǒng)分配電源,收集并分發(fā)大量原始傳感器數(shù)據(jù),并對這些數(shù)據(jù)進行處理以實現(xiàn)自動駕駛命令等。區(qū)域控制器PDC中主要集成以下幾部分功能,包含車身舒適、底盤、動力、熱管理、智能駕駛、大數(shù)據(jù)、電源模式、能源消耗數(shù)據(jù)服務、功能降級及異常處理、整車標定、SOA 服務等功能。
本文將針對其中不為人熟知的區(qū)域控制器進行詳述。
區(qū)域控制器PDC分布解析
如前所述,區(qū)域控制器PDC是整車物理區(qū)域的不同種傳感器采集/執(zhí)行器驅動的中心樞紐以及區(qū)域數(shù)據(jù)中心。可有效地承接整車的物理接口,對區(qū)域分布的電源進行分配,平衡不同的輸入輸出控制等,從而支持智能汽車內部的跨域融合。
對于當前整個自動駕駛車輛平臺而言,整個平臺預計搭載 PDC 3~4 個。一般情況下,這些區(qū)域控制器布置于車輛的四個角處,如果對自動駕駛相關傳感器的密度、電力需求都很高的場合,可以考慮在B柱附近增加兩個PDC。
可以參照如下布置位置方式進行:

如上圖表示了3個典型位置的區(qū)域控制器。分別是前艙區(qū)域控制器、座艙區(qū)域控制器、尾艙區(qū)域控制器。各區(qū)域控制器的功能如下:
1、前艙PDC
動力單元驅動控制;
前燈光系統(tǒng)驅動控制;
前艙傳感器(如前艙周邊4-6顆超聲波雷達原始數(shù)據(jù)處理);
各前艙控制器傳感器的IO 接口輸入;
前艙控制器(動力域控、底盤域控、自動駕駛域控)電源分配。
2、座艙PDC
座艙域控制器輸入(如超聲波傳感器目標處理數(shù)據(jù));
座艙輸出控制指令(如車門、車窗、車燈控制指令)轉化;
艙內燈光、音頻系統(tǒng)驅動控制;
座艙控制器電源分配。
3、后艙PDC
智能底盤、車身舒適系統(tǒng)的 IO 接入(如后艙周邊4-6顆超聲波雷達原始數(shù)據(jù)處理);
后艙控制器(如智能后視攝像頭、側后角雷達)電源分配。
一般的,由于前艙區(qū)域控制器與座艙區(qū)域控制器分別為自動駕駛控制器及智能座艙控制器提供相應的電源、接口、傳感器信號處理能力,因此該處的區(qū)域控制器是必須配置。而后艙PDC實際上可以根據(jù)其處理的功能而作為選配方案。
區(qū)域控制器PDC功能說明
1、整車區(qū)域配電中心
PDC的功能之一是負責區(qū)域內用電器的供電與用電管理,量化用電行為,提高用電效率與安全性。在下一代自動駕駛系統(tǒng)的區(qū)域控制架構中,由于需要充分考慮各控制器的供電冗余,對于區(qū)域控制器而言就需要有兩路電源對整車進行獨立供電。同時需要作為二級電源分配節(jié)點,給對應區(qū)域內下級控制器、傳感器或執(zhí)行器提供電源供電管理。
對于如上提到的冗余供電模型,需要充分考慮與智能電網管理模塊產品的配合設計來完成相應的供電架構,其結果是完成一套完整的可以適應不同自動駕駛等級的靈活的供電方案。如圖所示:

以自動駕駛分級為電源管理分割階段可實現(xiàn)如下電源能力配置:
基本電源架構階段:實現(xiàn)功能安全的獨立供電、負載用電情況記錄與分析,并實現(xiàn)用電故障診斷與隔離。
L2.5電源架構階段:加入智能電網管理模塊產品,針對ESP、EPS等功能安全要求高的控制器進行隔離處理,滿足用電安全,確保功能安全目標的完成。
L3+電源架構階段:可以在原供電基礎上,增加智能電網管理模塊進行控制器冗余供電的隔離,滿足用電安全,確保更高要求的功能安全目標的實現(xiàn)。
對于區(qū)域控制器的供電需求,需滿足同步供電類型配的電要求為非常電 ECU 供電考慮 PDC 供電或驅動的必要性,30A,45A 為一般配電的經驗值,后續(xù)可根據(jù)實際情況調整,對于為常電ECU供電時需要考慮整車睡眠狀態(tài)下還需要繼續(xù)供電,因此需要采用自動喚醒的電源供電方式進行驅動。此外,需要考慮單路要求的電流消耗不超過額定最大值,當特殊控制器需要保留硬線喚醒時,PDC 需提供喚醒供電。
2、整車區(qū)域通信中心
區(qū)域控制器承擔了區(qū)域信息中心或網關部分功能。PDC作為區(qū)域控制單元需要對其所負責的區(qū)域內節(jié)控制節(jié)點進行通信管理與信息轉發(fā),縮短信息通路,提高通信效率與安全性。
目前主流車型的總線帶寬,短期內使用一般使用2-5M的CAN-FD或100M以太網就能充分滿足現(xiàn)有通信需求。為了提升系統(tǒng)級功能安全,則通過預留雙路CAN或以太網通信進行數(shù)據(jù)備份。考慮到下一代產品中需要面向服務進行開發(fā)的SOA需求,區(qū)域控制器通信能力則需要至少預留一路CAN或以太網,并進行大帶寬通信,也能夠支持服務協(xié)議與服務本身的實現(xiàn),網絡拓撲簡圖如下:

PDC 總體可實現(xiàn)不同類別的傳感器采集以及控制器驅動。根據(jù)不同類型的傳感器,提供不同的采集策略;根據(jù)不同類型的執(zhí)行器,在控制器驅動過程中,提供不同的驅動策略、驅動斷開策略、驅動過載保護等。
PDC 中,對所有感知和驅動 IO 涉及終端ECU驅動能力和原始數(shù)據(jù)處理的能力,且對所有 IO 都需要進行接口匹配、信號濾波等處理。原始數(shù)據(jù)處理采用 CAN 或以太網進行傳輸,非實時要求的采用以太網傳輸(如顯示交互類),實時性要求高的采用 CAN 傳輸(如底盤制動、轉向、動力等)。
3、整車功能驅動控制
區(qū)域控制器作為整車級部分區(qū)域I/O輸入輸出及控制中心,將由其處理功能單一的節(jié)點,向軟件計算中心集中,且在其中提供底層服務。這種集成區(qū)域內的功能模塊,標準化硬件I/O的采集與驅動,可以提高擴展性與通用性。
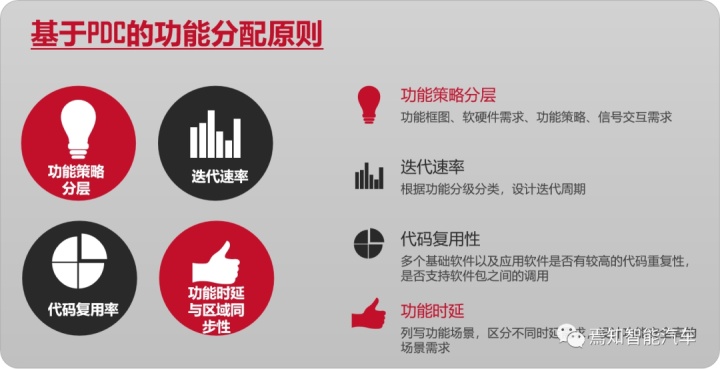
為計算中心實現(xiàn)新的復雜功能或特性提供軟硬件基礎,把分配在區(qū)域控制器PDC中的軟件模塊進行原子或基礎服務的封裝,一般在計算中心中通過SOME/IP協(xié)議調用相關資源,為計算中心實現(xiàn)新的復雜功能或特性提供軟硬件基礎。在新的應用軟件中將進行功能的重新劃分,劃分原則參照功能策略、分層功能時延、區(qū)域同步性、代碼復用率、功能可能的迭代速率、功能安全這幾個維度進行。
對于如上圖所示針對整個車輛功能分配原則包含如下的設計性能需求:
①設計相關功能系統(tǒng)框圖,判斷其中硬件需求;
②制定功能策略,列出信號交互需求;
③分析不同UseCase,判斷是否設計跨域交互;
④策略(感知、仲裁、控制、執(zhí)行)分層建模;
⑤根據(jù)不同層級分配不同的策略到相應的控制器中;
⑥對于時延要求高的場景,分析分配結果是否滿足性能要求;
⑦對于功能安全較高的場景,分析分配結果是否滿足功能安全要求。
基于SOA服務的智能汽車功能
下一代智能駕駛汽車需要進行面向服務的SOA設計,這一過程需要控制單元參照其所承擔的服務功能(車身舒適、AC、底盤、HCU 等)層面進行接口統(tǒng)一、服務轉化和封裝管理。用于其計算平臺功能調用,如功能激活、解閉鎖服務、車窗控制服務等。

如下將圍繞智能汽車駕駛域進行相關功能控制說明。當前,PDC 中 ADAS 功能主要集中在簡單的傳感信息處理上,也即對其中的12個超聲波雷達信號處理。包含提供如基礎服務或增強服務等。12個超聲波雷達USS 對應自動泊車、代客泊車配置。同時,對于如上的12個超聲波雷達,需要根據(jù)其安裝位置分別布置于車身不同的機艙內。如果是前后各一個PDC的模式,則是分別分配前后六個USS到兩個不同的PDC中,如果是4個PDC模式,則是區(qū)分前左、前右、后左、后右分別各掛3個USS的方式進行信息處理。
PDC 處理超聲波雷達信息包含如下:
1、原始目標位置、速度、加速度等探測信息;
2、目標及報警信息;
3、車位實際可用信息;
如上探測的目標、報警、車位信息需要發(fā)送到泊車控制器、行車控制器、座艙域控制器等用于控制自動泊車、低速行車、倒車 AEB 、報警提示等。
對于智能汽車來講,其重點關注車身舒適及底盤的相關控制邏輯。以上兩者中,前者對于實時性要求不高,因此,適用于譬如像智能啟動、內部燈光、電動車窗、電腦車門、胎壓監(jiān)測、電動轉向柱調節(jié)等。以上后者中,由于其功能安全要求較高,則需要適配更高的實時性和準確性。當然,一般情況下,制動相關的控制會單獨放到另外一個功能安全和控制性能更高的控制器(如車身控制單元VDC)中,但是部分制動功能也會不可避免的放到區(qū)域控制器中,如智能懸架控制中的空氣懸架就會將傳感器你和執(zhí)行器介入PDC中,并根據(jù)PDC反饋的傳感器狀態(tài)愛和整車狀態(tài),發(fā)送高度調節(jié)指令給PDC調整空氣懸架高度,且通常境況搞下,空氣懸架高度檢測功能集成到PDC中,定期喚醒監(jiān)測車身高度。此外,通常前PDC保留EPB控制,集成EPB控制模塊。
同時為了滿足更高級別的功能安全需求,PDC 可單獨搭載 功能安全較高的MCU,向上支持功能安全到 ASILD級別。算力可支撐基本的傳感器原始信號處理需求和控制器邏輯運算需求,一般會預留 50%以上算力。
總結
下一代自動駕駛系統(tǒng)為了實現(xiàn)SOA架構服務能力,通常采用了AUTOSAR 軟件架構、服務中間件來支持具有高安全高確定性的軟件部署。中央計算平臺上要求底層軟件、底層硬件、應用層軟件、應用層硬件解耦。作為實現(xiàn)這一智能服務平臺的區(qū)域控制單元,PDC需要進行有效的設備管理及配置管理,盡可能多的幫助中央域控制單元實現(xiàn)階段性解耦和接口封裝。實現(xiàn)設備即插即用,軟硬件隨時適配。通過執(zhí)行更簡單的控制功能,例如燈光、音頻系統(tǒng),從而進一步減少控制單元的數(shù)量。



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
