




 廣告
廣告





















































多維惡劣場(chǎng)景自動(dòng)駕駛車輛安全行為決策方法
2021-12-30 00:48:19· 來源:清華大學(xué)蘇州汽車研究院

目前L3級(jí)或更高級(jí)自動(dòng)駕駛的傳感器在惡劣天氣環(huán)境中由于感知能力受到環(huán)境因素的影響而無法正常工作。在路面濕滑的條件下,易發(fā)生打滑等安全隱患。在此之前只單獨(dú)
目前L3級(jí)或更高級(jí)自動(dòng)駕駛的傳感器在惡劣天氣環(huán)境中由于感知能力受到環(huán)境因素的影響而無法正常工作。在路面濕滑的條件下,易發(fā)生打滑等安全隱患。在此之前只單獨(dú)考慮車輛在一個(gè)維度的交通場(chǎng)景下的表現(xiàn),具有片面性與不確定性?,F(xiàn)將兩個(gè)維度的交通場(chǎng)景進(jìn)行耦合處理,綜合多維度的感知車輛的行駛環(huán)境。降低車速可以提高處于惡劣環(huán)境中自動(dòng)駕駛車輛的感知能力,以及保證行車安全。本文從預(yù)期功能安全角度出發(fā),考慮了道路層和氣象層兩個(gè)維度,提出了一種基于有限狀態(tài)機(jī)的自動(dòng)駕駛決策控制方法。
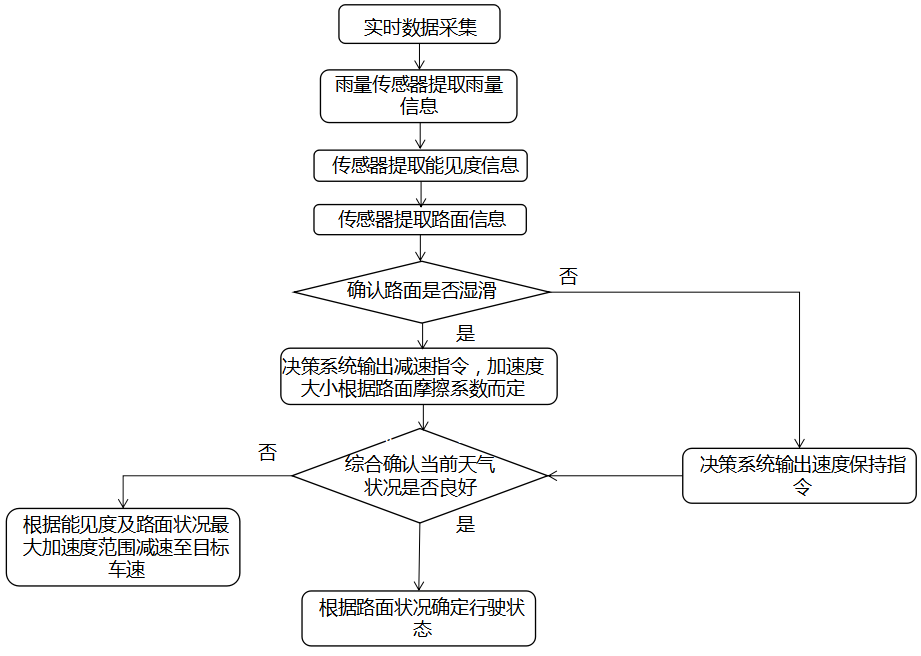
自動(dòng)駕駛車輛安全行為決策流程圖
環(huán)境認(rèn)知方法
本文提出的方法可以識(shí)別出雨量大小、環(huán)境能見度大小以及路面濕滑程度等環(huán)境信息,根據(jù)感知得到的環(huán)境狀態(tài)信息通過有限狀態(tài)機(jī)決定自動(dòng)駕駛車輛在不同環(huán)境條件下的行駛狀態(tài)。
具體方法流程為:
1.通過實(shí)時(shí)雨量傳感器來實(shí)時(shí)感知所處環(huán)境雨量大小,并輸出雨量大小信息,攝像頭傳感器獲取所處環(huán)境能見度情況及路面濕滑程度等環(huán)境信息。
2.根據(jù)傳感器輸出提供的雨量大小信息、能見度信息及路面濕滑程度信息通過深度學(xué)習(xí)圖像識(shí)別算法提取能見度大小及路面濕滑程度大小相關(guān)信息,進(jìn)行分類操作后,推測(cè)雨量大小狀態(tài)、能見度狀況及路面的濕滑程度狀態(tài)等相關(guān)信息,其中雨量大小信息是指雨量傳感器實(shí)時(shí)感知到的所處環(huán)境的雨量大?。荒芤姸刃畔⑹侵杆幁h(huán)境能見度大小參考值及能見度的置信度;路面濕滑程度信息是指前方路面反光值、路面反光值的權(quán)值、前方路面圖像的平均銳度、平均銳度的權(quán)值。
(1)判斷天氣狀況是否為雨量過大影響傳感器的性能:當(dāng) P1 - P2 > 0時(shí),則說明所處的天氣為雨量過大,自動(dòng)駕駛車輛的傳感器性能受到限制;若 P1 - P2 < 0時(shí),則說明雨量狀態(tài)在自動(dòng)駕駛車輛傳感器的可接受范圍內(nèi),不會(huì)影響傳感器的性能,車輛可以正常行駛。
P1:雨量傳感器輸出的雨量大小信息;P2:預(yù)先設(shè)定的雨量閾值。
(2)判斷能見度狀況是否影響傳感器性能的方法為:當(dāng) Q1 * Q2 > 0.9時(shí),則說明環(huán)境能見度較差,自動(dòng)駕駛車輛傳感器的性能受到限制,無法正常工作;當(dāng) Q1 * Q2 < 0.9時(shí),則說明環(huán)境能見度在傳感器正常工作的范圍內(nèi),性能不會(huì)受到影響。
Q1:攝像頭傳感器輸出的環(huán)境能見度狀況,其能見度等級(jí)定義為:極差、一般、良好。不同能見度下攝像頭傳感器對(duì)應(yīng)的視距為L(zhǎng)clear、Llight、Lheavy,當(dāng)能見度等級(jí)為極差時(shí),Q1 = 0;當(dāng)能見度等級(jí)為其他情況時(shí),Q1 = 1。
Q2:Q1的置信度。
(3)判斷路面濕滑程度是否影響傳感器性能的方法為:路面反光的的計(jì)算方法為:把圖像傳感器獲取的道路圖像分成n個(gè)大小相同區(qū)域(i = 1,2,3......n-1,n),平均亮度Hi為對(duì)每一個(gè)區(qū)域的灰度均值;將圖像的上半部分區(qū)域所有的平均亮度值相加得到Xu,剩下區(qū)域?yàn)閄d。則路面反光度的計(jì)算公式為Ψ=Xu - Xd。
路面平均銳度計(jì)算方法為:根據(jù)獲取的道路圖像,求其對(duì)應(yīng)的梯度圖像,計(jì)算梯度圖像中的任意一點(diǎn)的八鄰域中每個(gè)點(diǎn)值乘以該點(diǎn)與八鄰域中每個(gè)點(diǎn)距離,所有的乘積之和就是圖像中任意一點(diǎn)的銳度值,將所有的銳度值相加除以點(diǎn)的個(gè)數(shù)就可得到路面圖像的平均銳度Φ。
當(dāng)α*Ψ-β*Φ-Γ> 0時(shí),則說明前方路面濕滑程度較高,自動(dòng)駕駛車輛行駛在該路面上時(shí)附著力較小,容易發(fā)生側(cè)滑。當(dāng)α*Ψ-β*Φ-Γ< 0時(shí),則說明前方路面濕滑程度較低,車輛不會(huì)發(fā)生打滑。
Ψ:路面的反光度;α:路面反光度的權(quán)值;Φ:路面圖像的平均銳度;β:路面平均銳度的權(quán)值;Γ:預(yù)先設(shè)定的路面濕滑程度閾值。
有限狀態(tài)機(jī)
根據(jù)雨量狀態(tài)、能見度狀態(tài)及路面濕滑程度狀態(tài)通過有限狀態(tài)機(jī)決定自動(dòng)駕駛車輛的行駛狀態(tài)。先判斷路面狀況,確認(rèn)當(dāng)前路面狀態(tài)下的最大摩擦系數(shù)進(jìn)而確定最大制動(dòng)加速度,再根據(jù)最大制動(dòng)加速度求得不同能見度環(huán)境下的車輛目標(biāo)速度。當(dāng)自動(dòng)駕駛車輛行駛到雨量較小或天氣晴朗、能見度較高及前方路面濕滑程度較低或路面干燥的時(shí)候,自動(dòng)駕駛車輛由低速行駛狀態(tài)進(jìn)入正常速度行駛狀態(tài),其行駛示意圖如圖2所示。
1、不同濕滑路面的加速度確定
(1)自動(dòng)駕駛域控制器通過各個(gè)傳感器讀取瞬時(shí)參數(shù)計(jì)算得出所需制動(dòng)力F。
(2)自動(dòng)駕駛域控制器將制動(dòng)力通過防抱死系統(tǒng)按照特定比例加載到每個(gè)車輪的制動(dòng)器,域控制器實(shí)時(shí)得到每個(gè)車輪的滑移率,記錄每個(gè)車輪的滑移率為0.03,0.06,0.1時(shí)的角加速度以及實(shí)時(shí)制動(dòng)力。將制動(dòng)力F通過ABS防抱死系統(tǒng)加載到每一個(gè)車輪制動(dòng)器上,分配到兩個(gè)前輪上的制動(dòng)力都為0.3F,兩個(gè)后輪上的制動(dòng)力都為0.25F。因在濕滑路面上行駛,要保證行駛安全,四個(gè)車輪最終的最佳滑移率都要大于0.1。
(3)自動(dòng)駕駛域控制器根據(jù)記錄的滑移率小于等于0.1時(shí)的每個(gè)車路的實(shí)時(shí)制動(dòng)力以及角加速度信息,通過Kienche模型求出參數(shù)P1、P2,進(jìn)而根據(jù)該模型計(jì)算得出當(dāng)前路面狀況下的最佳滑移率λa和最大摩擦系數(shù)μmax。Kienche模型計(jì)算P1,P2的具體步驟為:

μ0.03,μ0.06,μ0.1分別代表當(dāng)滑移率是0.03,0.06,0.1時(shí)對(duì)應(yīng)的車輪與地面的摩擦系數(shù)。

α0.03,α0.06,α0.1分別對(duì)應(yīng)不同滑移率的車輪角加速度;R為車輪半徑;J為車輪的轉(zhuǎn)動(dòng)慣量;Tb為制動(dòng)力矩;Fz為路面接觸力。則通過Kienche模型計(jì)算得到的當(dāng)前路面狀況的最佳滑移率λa和最大摩擦系數(shù)μmax為:

(4)自動(dòng)駕駛域控制器將上面計(jì)算得出的當(dāng)前路面狀況的最佳滑移率λa加載到防抱死系統(tǒng)中,使得防抱死系統(tǒng)控制車輪的滑移率保持在λa的一定范圍內(nèi),與此同時(shí),車載域控制器依據(jù)車速傳感器得到的車輛速度信息通過差分處理得到此時(shí)的自動(dòng)駕駛車輛的加速度αr。
濕滑路面的摩擦系數(shù)取值范圍為μ=(0.2,0.55),考慮μ的值分別為μ1=0.2~0.3,μ2=0.3~0.4,μ3=0.4~0.55時(shí)最大加速度值αr為(α1,α2,α3)。
2、不同能見度下的目標(biāo)速度確認(rèn)
設(shè)自動(dòng)駕駛車輛在不同能見度下的可視距離為L(zhǎng)i,以可視距離作為車輛的制動(dòng)距離,根據(jù)加速度公式可得不同能見度情況下的目標(biāo)車速為:Vi=√(V0+2aiLi)。V0為車輛初始速度,ai為不同路面狀況的最大加速度。
根據(jù)能見度的不同確定車輛的行駛速度。當(dāng)Li依次為L(zhǎng)clear、Llight、Lheavy時(shí),濕滑路面情況下的目標(biāo)速度Vi的取值為(V1,V2,V3),干燥路面情況下的目標(biāo)速度取值為(V4,V5,V6)。
3、狀態(tài)機(jī)轉(zhuǎn)換條件確認(rèn)
不同環(huán)境因素下自動(dòng)駕駛車輛行駛狀態(tài)轉(zhuǎn)換條件:
z = 0 :前方路面干燥,路面摩擦系數(shù)較大,執(zhí)行器外部條件良好;
z = 1 :前方路面濕滑程度較高,路面摩擦系數(shù)較低;
μ1:路面摩擦系數(shù)為0.2~0.3,此時(shí)車輛最大加速度為α1;
μ2:路面摩擦系數(shù)為0.3~0.4,此時(shí)車輛最大加速度為α2;
μ3:路面摩擦系數(shù)為0.4~0.55,此時(shí)車輛最大加速度為α3;
Lclear:環(huán)境能見度為500m~1000m,此時(shí)在濕滑路面上車輛的目標(biāo)速度為V1,在干燥路面上車輛的目標(biāo)速度為V4;
Llight:環(huán)境能見度為200m~500m;此時(shí)在濕滑路面上車輛的目標(biāo)速度為V2
,在干燥路面上車輛的目標(biāo)速度為V5;
Lheavy:環(huán)境能見度50m~200m;此時(shí)在濕滑路面上車輛的目標(biāo)速度為V3,在干燥路面上車輛的目標(biāo)速度為V6;
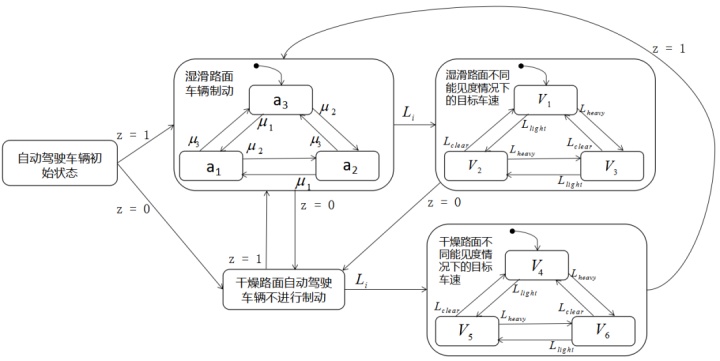
圖2 不同環(huán)境因素下狀態(tài)機(jī)切換示意圖
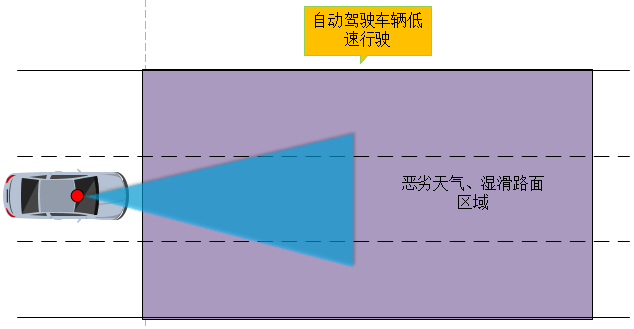
圖3車輛行駛在惡劣天氣、濕滑路面區(qū)域
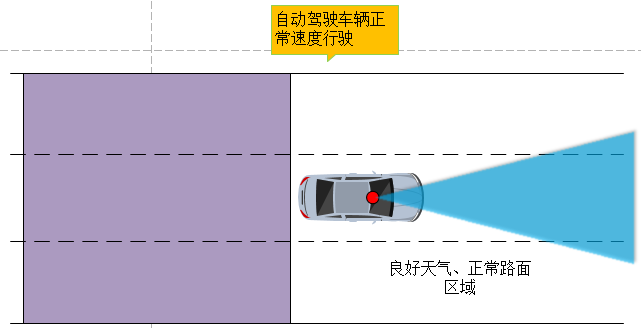
圖4車輛行駛在良好天氣、正常路面區(qū)域
在不同的天氣環(huán)境下和不同的路面情況下,通過有限狀態(tài)機(jī)根據(jù)不同的觸發(fā)條件轉(zhuǎn)換自動(dòng)駕駛車輛的行駛狀態(tài)來保證本車的安全正常行駛,即使在惡劣的環(huán)境條件下自動(dòng)駕駛車輛能夠彌補(bǔ)因傳感器性能不足造成的嚴(yán)重影響,能夠自主做出決策正常行駛。
參考文獻(xiàn)
[1] 劉凱, 陳慧巖, 龔建偉, 等. 高速無人駕駛車輛的操控穩(wěn)定性研究[J]. 汽車工程, 2019, 41(5): 514-521.
[2] ISO. Road Vehicles Safety of the Intended Functionality: ISO/PAS 21448: 2019[S]. Switzerland: ISO, 2018.
[3] 智能車輛駕駛行為決策方法研究[J]. 趙志成,華一丁,王文揚(yáng),陳正. 現(xiàn)代信息科技. 2019(24)
[4] 陳俊周,袁萍,吳曉,何俊彥,彭強(qiáng). 一種基于道路圖像的路面濕滑檢測(cè)方法[P]. 四川:CN104200673A,2014-12-10.
[5] YANG H J, JANG H, JEONG D S. Detection algorithm for road surface condition using wavelet packet transform and SVM[C]. The 19th Korea ? Japan Joint Workshop on Frontiers of Computer Vision. IEEE, 2013: 323-326.
[6] PAN G, FU L, YU R, et al. Winter road surface condition recognition using a pretrained deep convolutional neural network[R]. 2018.
[7] 冀杰, 黃巖軍, 李云伍, 等. 基于有限狀態(tài)機(jī)的車輛自動(dòng)駕駛行為決策分析[J]. 汽車技術(shù), 2018(12).
[8] 張冬忠 基于模糊神經(jīng)網(wǎng)絡(luò)的智能車輛自動(dòng)駕駛方法研究[D]. 西安: 長(zhǎng)安大學(xué), 2017.
[9] 邢智超, 王國(guó)業(yè), 何暢然, 等. 汽車雙轉(zhuǎn)鼓慣性試驗(yàn)臺(tái)等效路面附著理研究[J]. 汽車工程, 2019, 41(4): 455-461.
[10] 黃曉明, 趙潤(rùn)民, 黃若昀,等. 一種無人駕駛車輛在雨雪濕滑路面緊急制動(dòng)時(shí)的制動(dòng)力控制方法:, CN109080608A[P]. 2018.
[11] 張安靜,董立強(qiáng),姜海峰,彭麗秀. 基于滑移率的汽車側(cè)向穩(wěn)定性控制策略研究[A].重慶汽車工程學(xué)會(huì),2020:10.
[12]用于車輛穩(wěn)定性控制的直接橫擺力矩及車輪變滑移率聯(lián)合控制研究[J]. 余卓平,高曉杰,張立軍. 汽車工程. 2006(09)
[13] Ryosuke Matsuzaki,Kazuto Kamai,Ryosuke Seki. Intelligent tires for identifying coefficient of friction of tire/road contact surfaces using three-axis accelerometer[J]. Smart Materials and Structures,2015,24(2):
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 59



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
