




 廣告
廣告





















































自然駕駛場景提取淺談
2021-12-31 00:28:05· 來源:國汽智聯(lián)

內(nèi)容導(dǎo)讀近年來,隨著自動(dòng)駕駛技術(shù)的研究深入和高級輔助駕駛功能的廣泛應(yīng)用,汽車產(chǎn)業(yè)步入智能化和網(wǎng)聯(lián)化的發(fā)展階段。越來越多的汽車廠商將研發(fā)重心轉(zhuǎn)移到L2級和
內(nèi)容導(dǎo)讀
近年來,隨著自動(dòng)駕駛技術(shù)的研究深入和高級輔助駕駛功能的廣泛應(yīng)用,汽車產(chǎn)業(yè)步入智能化和網(wǎng)聯(lián)化的發(fā)展階段。越來越多的汽車廠商將研發(fā)重心轉(zhuǎn)移到L2級和L3級車型的開發(fā),特定區(qū)域下的L4級別的自動(dòng)駕駛車輛也在逐漸落地。自然駕駛場景,顧名思義就是人類駕駛員駕車行駛在道路環(huán)境中與周圍交通參與者、交通基礎(chǔ)設(shè)施等產(chǎn)生交互的真實(shí)場景。自然駕駛場景數(shù)據(jù)來源于真實(shí)世界,數(shù)據(jù)多樣性高,可為感知識別算法的訓(xùn)練和測試提供基礎(chǔ)數(shù)據(jù),為決策和控制算法的開發(fā)提供邏輯思路。本文將對自然駕駛場景提取進(jìn)行簡要分析。
1、為什么要進(jìn)行自然駕駛場景提取
自然駕駛采集的場景一般都可被認(rèn)為是高頻場景。高頻場景可能在測試和驗(yàn)證上并不如邊緣場景那樣可以提供明確的測試邊界,但是卻可為自動(dòng)駕駛算法開發(fā)提供適用范圍的重要參考。場景數(shù)據(jù)采集車在駕駛過程中的路徑選擇、駕駛習(xí)慣、對交通法規(guī)的應(yīng)變反應(yīng)等可為決策算法的研發(fā)提供參考,自然駕駛場景中面對的雨天、雪天、逆光、道路擁堵等諸多情況可為感知算法的開發(fā)和訓(xùn)練提出參考等。
2、自然駕駛場景面臨的問題
采集數(shù)據(jù)質(zhì)量的高低和場景提取參數(shù)的界定是影響自然駕駛場景質(zhì)量的兩個(gè)重點(diǎn)。
自然駕駛場景的原始數(shù)據(jù)來源于場景數(shù)據(jù)采集車,因此直接受到傳感器設(shè)備質(zhì)量的影響。不同類型傳感器生成的目標(biāo)列表方式有較大的差別,有的傳感器直接能夠輸出目標(biāo)列表,比如智能攝像頭和毫米波雷達(dá);而有的傳感器則需要經(jīng)過后處理才能得到目標(biāo)列表,比如激光雷達(dá)。另外,采集數(shù)據(jù)的格式也無法做到完全統(tǒng)一,因此需要制定統(tǒng)一的標(biāo)準(zhǔn)方便提取軟件的后續(xù)處理。場景提取參數(shù)的界定也是個(gè)難題,需要結(jié)合自然駕駛場景服務(wù)的功能開發(fā)類型制定參數(shù)范圍。如果設(shè)置的過于苛刻,則無法提取足量的場景;如果設(shè)置的過于簡單,則可能會(huì)生成很多無效場景。
3、自然駕駛場景的提取方法淺談
現(xiàn)階段提取場景的方法主要可以分為兩類,人工提取和自動(dòng)提取,兩類提取方法可以組合使用。人工提取是由標(biāo)注人員通過場景標(biāo)注工具查看采集的場景片段,按照自然駕駛場景的定義進(jìn)行場景片段的截取,可按照PEGASUS場景描述六層模型進(jìn)行完整描述,缺點(diǎn)是成本比較高;自動(dòng)提取是通過制定場景提取的規(guī)則或者采用機(jī)器學(xué)習(xí)的方式,對海量的數(shù)據(jù)進(jìn)行快速的場景自動(dòng)提取,缺點(diǎn)是提取的準(zhǔn)確率和召回率比人工提取差。

圖1 自然駕駛場景提取流程示意圖
4、現(xiàn)階段成果及應(yīng)用
國汽智聯(lián)已完成對自然駕駛場景的人工提取軟件和基于規(guī)則的自動(dòng)提取工具的開發(fā)。人工提取軟件設(shè)計(jì)了可視化視頻窗口界面,可以方便地進(jìn)行場景片段的截取,并按照PEGASUS的六層場景描述模型進(jìn)行描述?;谝?guī)則的自動(dòng)提取工具應(yīng)用Spark架構(gòu),基于選定參數(shù)和設(shè)定范圍對海量數(shù)據(jù)進(jìn)行快速提取。
當(dāng)自然駕駛場景被提取出來之后,再通過場景分割環(huán)節(jié)就可以得到批量的自然駕駛場景數(shù)據(jù)片段。自然駕駛場景數(shù)據(jù)片段既可以用于場景還原生成OpenX文件,還可以應(yīng)用于數(shù)據(jù)分析為自動(dòng)駕駛功能設(shè)計(jì)提供參考,也可以應(yīng)用于感知數(shù)據(jù)集的建設(shè),支持感知算法的訓(xùn)練與測試。
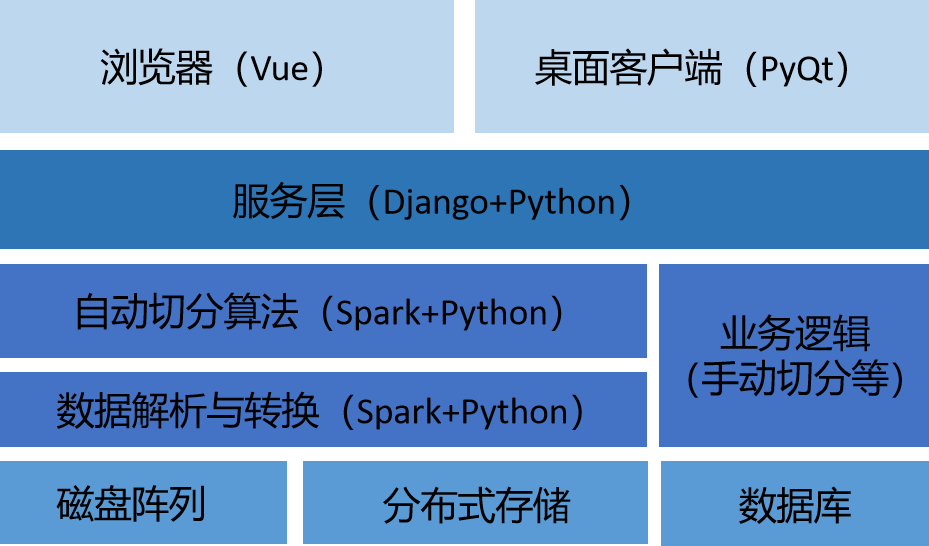
圖2 國汽自研自動(dòng)切分工具架構(gòu)設(shè)計(jì)

圖3 國汽自研自動(dòng)切分工具數(shù)據(jù)審核界面



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
