




 廣告
廣告





















































整車環(huán)境下動(dòng)力總成懸置系統(tǒng)振動(dòng)特性研究
2022-02-16 09:47:12· 來源:汽車NVH云講堂

摘要:基于動(dòng)力總成懸置系統(tǒng)的振動(dòng)處于整車環(huán)境的考慮,建立包含動(dòng)力總成懸置系統(tǒng)的整車虛擬樣機(jī)模型.對(duì)比六自由度和整車環(huán)境下動(dòng)力總成懸置系統(tǒng)的固有特性;通
摘要:基于動(dòng)力總成懸置系統(tǒng)的振動(dòng)處于整車環(huán)境的考慮,建立包含動(dòng)力總成懸置系統(tǒng)的整車虛擬樣機(jī)模型.對(duì)比六自由度和整車環(huán)境下動(dòng)力總成懸置系統(tǒng)的固有特性;通過整車在B級(jí)路面行駛試驗(yàn),分析動(dòng)力總成懸置系統(tǒng)的振動(dòng)響應(yīng)特性;通過整車在極限工況行駛的模擬,對(duì)動(dòng)力總成的位移和懸置元件的變形進(jìn)行研究.結(jié)果表明:整車建模更好地反映實(shí)際振動(dòng)情況,可用于動(dòng)力總成懸置系統(tǒng)設(shè)計(jì)流程中的匹配設(shè)計(jì)、振動(dòng)分析、動(dòng)載荷校核和空間位置干涉校核等環(huán)節(jié).
關(guān)鍵詞:整車;懸置系統(tǒng);固有特性;振動(dòng)
0 引言
動(dòng)力總成懸置系統(tǒng)的振動(dòng)直接影響汽車乘坐舒適性[1].在動(dòng)力總成懸置系統(tǒng)的研究中,基于剛性基礎(chǔ)假設(shè)的六自由度模型建模方式被廣泛使用[2].然而動(dòng)力總成處于整車這樣一個(gè)復(fù)雜的系統(tǒng)中,并且汽車朝著輕量化方向發(fā)展,動(dòng)力總成相對(duì)于車身的質(zhì)量比重上升,動(dòng)力總成支撐于剛性基礎(chǔ)的假設(shè)建立的六自由度模型變得不可靠[3].因此,很多學(xué)者提出在整車中研究動(dòng)力總成懸置系統(tǒng).文[4]在簡(jiǎn)化的整車模型基礎(chǔ)上,以怠速工況汽車座椅地板處的振動(dòng)響應(yīng)最小為目標(biāo),對(duì)懸置的位置和剛度進(jìn)行優(yōu)化;文[5]建立了13自由度整車動(dòng)力學(xué)模型,并對(duì)六自由度和十三自由度模型的固有特性進(jìn)行比較;文[6]在建立比較完善的整車模型的基礎(chǔ)上,通過正交試驗(yàn)研究發(fā)動(dòng)機(jī)懸置參數(shù)對(duì)座椅振動(dòng)的影響,并對(duì)影響大的參數(shù)進(jìn)行優(yōu)化.
然而,現(xiàn)有研究或者對(duì)整車系統(tǒng)進(jìn)行大量簡(jiǎn)化,或者沒有考慮有路面激勵(lì)情況下的動(dòng)力總成懸置系統(tǒng)的響應(yīng)問題.同時(shí),對(duì)懸置系統(tǒng)設(shè)計(jì)過程中懸置元件動(dòng)載荷的校核以及各零部件空間位置干涉情況校核鮮有研究.
本研究以某國產(chǎn)轎車三點(diǎn)式橡膠懸置為例,建立包含動(dòng)力總成懸置系統(tǒng)的整車動(dòng)力學(xué)仿真模型.比較了六自由度模型和整車模型中動(dòng)力總成的固有特性.通過整車在B級(jí)路面的行駛試驗(yàn)對(duì)動(dòng)力總成的振動(dòng)響應(yīng)和懸置元件的動(dòng)載荷進(jìn)行分析.同時(shí),模擬汽車特殊工況下的行駛狀態(tài),對(duì)動(dòng)力總成的空間位移和懸置元件的限位情況進(jìn)行研究.通過整車建模對(duì)動(dòng)力總成懸置系統(tǒng)展開研究,為懸置系統(tǒng)的設(shè)計(jì)分析提供參考.
1 系統(tǒng)模型建立
1.1 動(dòng)力總成懸置系統(tǒng)建模
動(dòng)力總成的固有頻率遠(yuǎn)大于懸置系統(tǒng)的頻率,因此可以將動(dòng)力總成假設(shè)為剛體,而橡膠懸置元件簡(jiǎn)化成三根互相垂直的彈簧阻尼元件,這樣動(dòng)力總成懸置系統(tǒng)就簡(jiǎn)化為一個(gè)六自由度的振動(dòng)模型[7].如圖1所示.在建模時(shí)采用圖1中所示的坐標(biāo)系.坐標(biāo)原點(diǎn)為動(dòng)力總成質(zhì)心,x軸正向平行于曲軸中心線并指向發(fā)動(dòng)機(jī)前方,z軸正向與發(fā)動(dòng)機(jī)缸體中心線平行指向上方,y軸正向根據(jù)右手定則確定.
1.2 整車虛擬樣機(jī)建模
以某A型車為例,該車型前懸架為雙橫臂獨(dú)立懸架,后懸架為斜置臂獨(dú)立懸架;轉(zhuǎn)向系統(tǒng)采用齒輪齒條式轉(zhuǎn)向機(jī)構(gòu);動(dòng)力總成采用三點(diǎn)支撐,三個(gè)懸置元件為橡膠懸置.汽車是一個(gè)復(fù)雜系統(tǒng),在整車建模時(shí)可以把對(duì)本研究影響不大的部分進(jìn)行簡(jiǎn)化.本研究對(duì)于各部分子系統(tǒng)做如下假設(shè):1)將承載式車身簡(jiǎn)化到其質(zhì)心,用一個(gè)質(zhì)量塊表示;2)懸架系統(tǒng)簡(jiǎn)化為線性剛度和阻尼;3)制動(dòng)系統(tǒng)和座椅系統(tǒng)對(duì)本研究影響較小,將其質(zhì)量慣性特性簡(jiǎn)化到車身質(zhì)量塊.動(dòng)力總成懸置系統(tǒng)的假設(shè)如1.1節(jié)所述.在ADAMS進(jìn)行虛擬樣機(jī)建模時(shí),橡膠懸置元件使用BUSHING力元代替[8],并按實(shí)際安裝角度將動(dòng)力總成安裝在車架上;汽車輪胎采用UA輪胎模型.在Adams/View中建立整車虛擬樣機(jī)模型如圖2所示.
2 動(dòng)力總成激振力分析
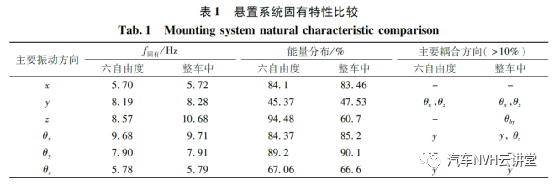
對(duì)于單缸發(fā)動(dòng)機(jī),作用在汽車的激振力有往復(fù)直線運(yùn)動(dòng)質(zhì)量的往復(fù)慣性力,旋轉(zhuǎn)運(yùn)動(dòng)質(zhì)量的旋轉(zhuǎn)慣性力和由曲軸旋轉(zhuǎn)產(chǎn)生的反向力矩.對(duì)于直列四缸發(fā)動(dòng)機(jī),在設(shè)計(jì)時(shí)曲柄按照180°的曲柄夾角布置,一階往復(fù)慣性力和旋轉(zhuǎn)慣性力就互相平衡.而二階以上的往復(fù)慣性力比較小,忽略不計(jì),剩下二階往復(fù)慣性力和曲軸上的反作用力矩.將各缸的二階往復(fù)慣性力和曲軸上的反作用力矩按照空間力系的簡(jiǎn)化原則簡(jiǎn)化到動(dòng)力總成質(zhì)心坐標(biāo)系,得到發(fā)動(dòng)機(jī)激振力的計(jì)算公式[9]:
式中:α為動(dòng)力總成布置角;m為單缸活塞及往復(fù)運(yùn)動(dòng)部分質(zhì)量;r?yàn)榍霃?;λ為曲柄半徑與連桿長度之比;ω為發(fā)動(dòng)機(jī)曲軸轉(zhuǎn)動(dòng)角速度;A為二三缸中心線到動(dòng)力總成質(zhì)心的水平距離;M0為發(fā)動(dòng)機(jī)輸出扭矩.
3 虛擬試驗(yàn)分析
3.1 懸置系統(tǒng)固有特性的分析
利用ADAMS的振動(dòng)模塊分別對(duì)六自由度動(dòng)力總成懸置系統(tǒng)模型和整車模型進(jìn)行模態(tài)分析,可以獲得兩種模型中動(dòng)力總成系統(tǒng)在各個(gè)振動(dòng)方向的固有頻率和能量分布,如表1所示.由表1可見,六自由度模型和整車模型中動(dòng)力總成懸置系統(tǒng)的固有頻率和解耦率在x和y方向的平動(dòng)以及三個(gè)方向的轉(zhuǎn)動(dòng)相差不大.而在動(dòng)力總成主要的振動(dòng)方向(z向)固有頻率分別為8.57和10.68Hz,解耦率分別為94.48%和60.7%,由此可見,具有一定剛度的彈性懸架對(duì)動(dòng)力總成垂向振動(dòng)產(chǎn)生比較大的影響.在整車中動(dòng)力總成垂向振動(dòng)與車身俯仰方向存在超過10%的耦合.在整車系統(tǒng)中得到的動(dòng)力總成懸置系統(tǒng)的固有特性能更好地反映與其他子系統(tǒng)之間的關(guān)系.因此,對(duì)動(dòng)力總成懸置系統(tǒng)進(jìn)行匹配設(shè)計(jì)時(shí),考慮使用整車模型會(huì)更加合理.
3.2 懸置系統(tǒng)動(dòng)態(tài)響應(yīng)分析
動(dòng)力總成懸置系統(tǒng)的振動(dòng)響應(yīng)特性是汽車NVH研究的重要內(nèi)容,已有研究大都只考慮在發(fā)動(dòng)機(jī)激振力作用下的情況.然而實(shí)際行車中,懸置系統(tǒng)還要受到來自路面的沖擊,并與汽車其他子系統(tǒng)的振動(dòng)互相作用,僅僅考慮發(fā)動(dòng)機(jī)激振力下的振動(dòng)響應(yīng)不能完全反映實(shí)際振動(dòng)情況.本研究在建立整車模型的基礎(chǔ)上,在國標(biāo)GB7031《車輛振動(dòng)輸入———路面不平度表示方法》[10]規(guī)定的B級(jí)路面進(jìn)行仿真試驗(yàn).汽車分別以30km·h-1(發(fā)動(dòng)機(jī)轉(zhuǎn)速為1500r· min-1)、60km· h-1(發(fā)動(dòng)機(jī)轉(zhuǎn)速為2500r· min-1)、120km·h-1(發(fā)動(dòng)機(jī)轉(zhuǎn)速為3500r·min-1)速度行駛,對(duì)動(dòng)力總成質(zhì)心垂向振動(dòng)加速度、垂向位移、右懸置的垂向傳遞力和垂向變形進(jìn)行測(cè)量.并將測(cè)量結(jié)果和發(fā)動(dòng)機(jī)在對(duì)應(yīng)轉(zhuǎn)速下汽車靜止時(shí)的結(jié)果進(jìn)行比較,方便觀察路面不平度對(duì)動(dòng)力總成響應(yīng)的影響,如圖3~圖6和表2所示.左懸置和后懸置有類似的特性表現(xiàn).
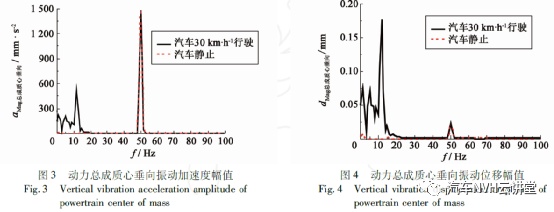
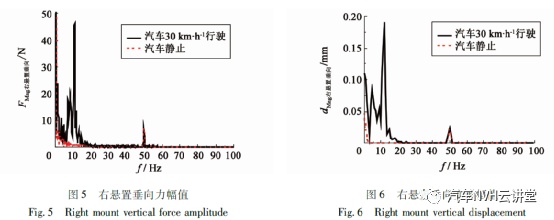
圖3~圖6為汽車在30km·h-1(1500r·min-1)時(shí)動(dòng)力總成懸置系統(tǒng)在主要的振動(dòng)方向———垂向的結(jié)果.
圖3表示的是總成質(zhì)心垂向振動(dòng)幅值隨頻率的變化.振動(dòng)主要由兩部分構(gòu)成,一部分是低于20Hz的振動(dòng),汽車靜止時(shí)該部分幾乎為0;另一部分是頻率在50Hz左右的振動(dòng),與發(fā)動(dòng)機(jī)1500r·min-1的激振力頻率相對(duì)應(yīng),且在汽車運(yùn)動(dòng)和靜止時(shí)完全相同.由此可見,路面激勵(lì)增加了動(dòng)力總成在20Hz以下的低頻振動(dòng).
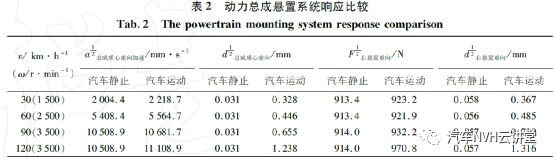
從圖4~圖6可見,總成垂向位移幅值、右懸置垂向傳遞力幅值和右懸置垂向變形幅值的振動(dòng)組成基本與總成垂向加速度幅值相同,但是由路面引起的低于20Hz的振動(dòng)成為主要的振動(dòng)部分.由此可見,在進(jìn)行動(dòng)力總成懸置系統(tǒng)動(dòng)態(tài)特性分析時(shí)不能忽略路面激勵(lì)的作用.在其他車速下響應(yīng)特性有相同的趨勢(shì),各個(gè)車速下響應(yīng)參量的均方根值見表2.懸置系統(tǒng)的設(shè)計(jì)過程中需要對(duì)懸置元件的動(dòng)載荷和動(dòng)變形進(jìn)行校核,從以上分析可知,考慮路面激勵(lì)情況的校核能更準(zhǔn)確地反映實(shí)際行車情況,更具參考價(jià)值.
3.3 懸置系統(tǒng)隔振特性分析
懸置系統(tǒng)一個(gè)主要作用是隔振,包括動(dòng)力總成振動(dòng)向車身傳遞和路面激勵(lì)引起的振動(dòng)向動(dòng)力總成傳遞兩個(gè)方向.在懸置系統(tǒng)的設(shè)計(jì)初期,通常采用系統(tǒng)固有頻率的配置和能量解耦來評(píng)價(jià)懸置系統(tǒng)隔振的好壞和作為目標(biāo)對(duì)懸置系統(tǒng)進(jìn)行設(shè)計(jì),但是懸置系統(tǒng)最終隔振性能的好壞并不完全由解耦率決定[11].因此,可以進(jìn)一步采用傳遞率來分析和設(shè)計(jì)懸置系統(tǒng),直到隔振效果滿意為止.傳遞率是指主動(dòng)邊振動(dòng)大小與被動(dòng)邊振動(dòng)大小的比值.如果傳遞率越大,那么隔振器的隔振效果就越好[12].加速度的傳遞率用分貝形式表達(dá)為:

式中:aa是主動(dòng)邊振動(dòng)的加速度;ap是被動(dòng)邊振動(dòng)的加速度.
通常當(dāng)傳遞率大于20dB時(shí),這個(gè)隔振系統(tǒng)被認(rèn)為是滿足要求的.傳遞率大于20dB意味著加速度從主動(dòng)邊傳遞到被動(dòng)邊要衰減10倍,即:aa≥ 10ap.
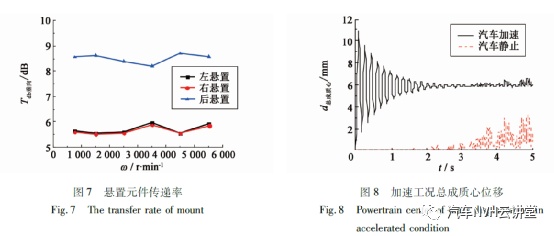
傳遞率的計(jì)算需要懸置元件動(dòng)力總成側(cè)和車身側(cè)的加速度.六自由度模型因無法獲得車身側(cè)的加速度而無法通過傳遞率來對(duì)懸置系統(tǒng)進(jìn)行研究,而整車模型克服了這個(gè)問題.由于發(fā)動(dòng)機(jī)的振動(dòng)與轉(zhuǎn)速和頻率有關(guān),因此,傳遞率也與轉(zhuǎn)速和頻率有關(guān),各懸置應(yīng)該在整個(gè)工作轉(zhuǎn)速范圍都達(dá)到上面提到的傳遞率標(biāo)準(zhǔn)[12].按照傳遞率的定義得到三個(gè)懸置元件的垂向傳遞率,如圖7所示.
圖7可見,后懸置的傳遞率比左右懸置的傳遞率要大,有更好的隔振效果.但是三個(gè)懸置元件的傳遞率均小于20dB,沒有達(dá)到良好的隔振效果.可以進(jìn)一步通過以傳遞率為目標(biāo)對(duì)動(dòng)力總成懸置系統(tǒng)進(jìn)行匹配設(shè)計(jì),提高系統(tǒng)的隔振效果.
3.4 懸置系統(tǒng)限位特性分析
動(dòng)力總成懸置系統(tǒng)的另一個(gè)主要作用是支承和限位.為減少動(dòng)力總成振動(dòng)向車身的傳遞,希望懸置越軟越好.但是考慮到汽車各個(gè)零部件之間空間布置的緊湊性和有限性,必須保證動(dòng)力總成的最大位移和懸置元件的最大變形在一定的范圍之內(nèi),避免動(dòng)力總成與汽車其他零部件發(fā)生干涉[3].在動(dòng)力總成懸置系統(tǒng)設(shè)計(jì)過程中,必須校核懸置元件靜、動(dòng)態(tài)變形和校核各零部件空間位置是否干涉[13].
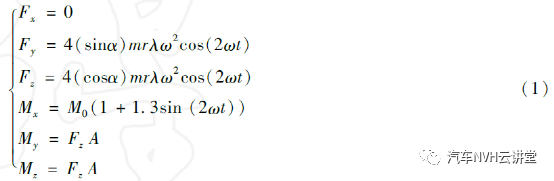
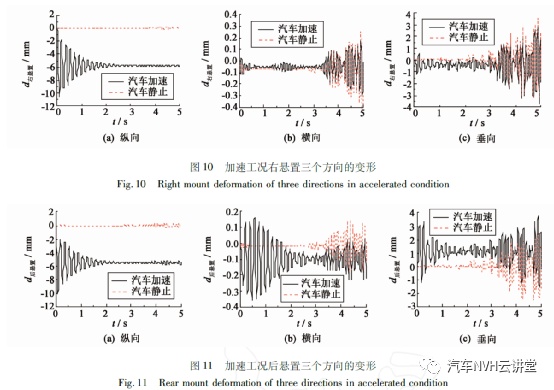
動(dòng)力總成最大位移和懸置元件的最大變形通常發(fā)生在汽車行駛過程中的特殊工況中,通用汽車公司規(guī)定28種工況下動(dòng)力總成位移及懸置變形都要控制在合理的范圍[14].本研究以0.8g加速度直線行駛和0.4g側(cè)向加速度轉(zhuǎn)彎為例,用整車模擬試驗(yàn)來獲取動(dòng)力總成的位移和懸置元件的變形.直線加速時(shí)間為5s,車速從0加速到140km·h-1,對(duì)應(yīng)的發(fā)動(dòng)機(jī)轉(zhuǎn)速從750到5500r·min-1.轉(zhuǎn)彎車速為60km·h-1,發(fā)動(dòng)機(jī)轉(zhuǎn)速為2500r·min-1.本研究主要考察極限工況引起的動(dòng)力總成位移量和懸置元件的形變量,因此,使用ADAMS自帶的mdi_2d_flat路面.圖8~圖11為極限加速工況結(jié)果.

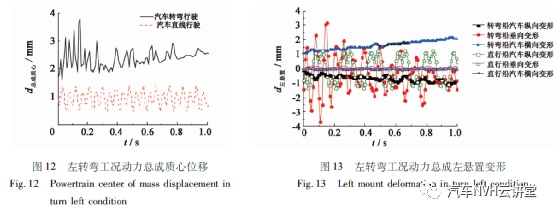
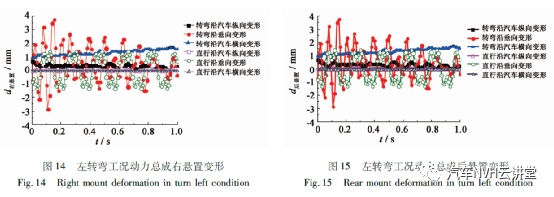
轉(zhuǎn)彎工況汽車先以穩(wěn)定車速直線行駛,再左轉(zhuǎn)彎,結(jié)果取轉(zhuǎn)彎過程中的某一秒并與相應(yīng)車速勻速直線行駛時(shí)的結(jié)果相比較,如圖12~圖15所示.
圖12~圖15可見,汽車在極限加速和轉(zhuǎn)彎工況下,動(dòng)力總成的位移幅值和懸置元件的形變量與普通工況相比都發(fā)生了較大變化.在加速工況,懸置元件的變形主要是在沿汽車縱向,即汽車加速方向.而在另外兩個(gè)方向變形與汽車靜止時(shí)相比變化不明顯.從汽車轉(zhuǎn)彎工況看,懸置元件變形較大的方向是沿汽車橫向,還是在加速度方向.總體上,由于汽車轉(zhuǎn)彎的極限加速度小于汽車加速工況的加速度,在動(dòng)力總成振動(dòng)位移和懸置元件的變形上,汽車加速工況比轉(zhuǎn)彎工況大.因此校核懸置元件動(dòng)態(tài)變形和校核各零部件空間位置是否干涉時(shí),主要考慮汽車能夠產(chǎn)生最大加速度的工況.
4 結(jié)語
1)動(dòng)力總成懸置系統(tǒng)在整車模型和基于剛性基礎(chǔ)假設(shè)的六自由模型中,固有頻率和能量解耦率在主要的振動(dòng)方向(垂向)有較大差別,整車模型能夠反應(yīng)懸置系統(tǒng)與汽車其他子系統(tǒng)的關(guān)系,更具參考價(jià)值.
2)動(dòng)力總成懸置系統(tǒng)的動(dòng)態(tài)響應(yīng)由路面激勵(lì)引起的低頻振動(dòng)和發(fā)動(dòng)機(jī)激振力引起的較高頻率的振動(dòng)組成.因此在懸置系統(tǒng)動(dòng)態(tài)響應(yīng)特性分析中,應(yīng)對(duì)路面激勵(lì)給以考慮.
3)動(dòng)力總成位移和懸置元件的變形通常發(fā)生在加速度最大的方向,整車建??梢苑奖愕貙?duì)動(dòng)力總成位移和懸置元件變形進(jìn)行校核.
作者:嚴(yán)世榕,李智強(qiáng)
作者單位:(福州大學(xué)機(jī)械工程及自動(dòng)化學(xué)院,福建福州?。常担埃保保叮?
來源:福州大學(xué)學(xué)報(bào)(自然科學(xué)版)
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 103



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
