




 廣告
廣告





















































新版自動駕駛感知技術(shù)
2022-02-19 23:00:46· 來源:汽車動力總成

汽車是20世紀(jì)最偉大的發(fā)明之一,在我們?nèi)粘I钪邪l(fā)揮著巨大作用。但據(jù)國際世衛(wèi)組織統(tǒng)計,我國每年交通死亡人數(shù)大約在20萬,全球每年大約在120萬左右人數(shù)死于交
汽車是20世紀(jì)最偉大的發(fā)明之一,在我們?nèi)粘I钪邪l(fā)揮著巨大作用。但據(jù)國際世衛(wèi)組織統(tǒng)計,我國每年交通死亡人數(shù)大約在20萬,全球每年大約在120萬左右人數(shù)死于交通事故,且在未來會持續(xù)升高,美國公路交通管理局一項報告顯示,93%事故與人為失誤有關(guān)。據(jù)歐盟在歐洲交通事故分析中得的結(jié)論安裝高級自動駕駛輔助設(shè)備能有效的降低25%前向碰撞,可避免60%的橫向偏離碰撞風(fēng)險。
一般來說,自動駕駛系統(tǒng)包含感知預(yù)測,規(guī)劃決策和執(zhí)行控制這三個主要模塊。粗略來說,這三個模塊對應(yīng)生物系統(tǒng)的眼睛,大腦和四肢。感知系統(tǒng)負(fù)責(zé)了解周圍障礙物和道路的信息,決策系統(tǒng)根據(jù)周圍的環(huán)境以及設(shè)定的目標(biāo)決定下一步需要執(zhí)行的動作,而控制系統(tǒng)則負(fù)責(zé)執(zhí)行這些動作,比如轉(zhuǎn)向,加速,剎車等。
感知環(huán)節(jié)對于自動駕駛技術(shù)是及其重要的,相當(dāng)于人的眼睛和耳朵,負(fù)責(zé)了解周圍障礙物和道路信息,通常可以將環(huán)境感知技術(shù)分為兩大類:自主環(huán)境感知、協(xié)同環(huán)境感知。協(xié)同環(huán)境感知技術(shù)則是通過使用 V2X 車聯(lián)網(wǎng)和高精度地圖等進(jìn)行信息交互和駕駛場景理解。自主環(huán)境感知技術(shù)主要是利用毫米波雷達(dá)、視覺傳感器等多種車載傳感器感知周圍環(huán)境,感知主要目標(biāo)包括動態(tài)目標(biāo)(汽車、行人、騎自行車者等交通參與者)和靜態(tài)目標(biāo)(道路、房屋、樹木等建筑設(shè)施)。感知內(nèi)容主要是對動、靜態(tài)目標(biāo)(障礙物)的三維尺寸、三維位置、幾何形狀、行駛方向等物理信息進(jìn)行精細(xì)的預(yù)測和判斷,以下為自主環(huán)境感知傳感器特性對比:

以下是對主流自主環(huán)境感知傳感器進(jìn)行綜述:
01、毫米波雷達(dá)
信號波長處于 1~10mm 范圍的探測雷達(dá)統(tǒng)稱為毫米波雷達(dá),其大致的工作流程如下:(1)毫米波雷達(dá)的波形發(fā)生器產(chǎn)生發(fā)射信號 XT;(2)發(fā)射信號XT 發(fā)射后,經(jīng)過目標(biāo)表面的反射形成回波信號 XR,并被毫米波雷達(dá)的接收天線陣列接收;(3)通過混頻器對 XT 和 XR 進(jìn)行處理,得到的輸出為 I;(4)通過低通濾波器對 I 進(jìn)行處理,得到由若干個恒定頻率的余弦波組合而成的中頻信號;(5)對中頻信號進(jìn)行快速傅里葉變換以及二維快速傅里葉變換后,通過計算得到目標(biāo)的距離特征信息R 和速度特征信息 v .(6)通過角度估計算法或三維快速傅里葉變換及計算得到目標(biāo)的角度特征信息θ。
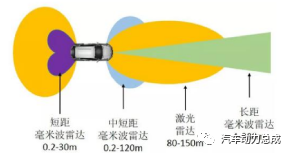
毫米波雷達(dá)具有探測穩(wěn)定、探測范圍廣等優(yōu)點。在不同的應(yīng)用場景中使用的毫米波雷達(dá)類型也有所不同,如超短距離雷達(dá)主要應(yīng)用于占位檢測,短距離雷達(dá)主要應(yīng)用于側(cè)向來車警示,中距離雷達(dá)主要應(yīng)用于車道變更輔助等。
目前的量產(chǎn)毫米波雷達(dá)都只能稱為3D(距離-方位角-多普勒)雷達(dá)或準(zhǔn)4D雷達(dá),基本上缺失或有很弱的俯仰測角/測高能力,這就導(dǎo)致雷達(dá)無法單獨作為傳感器識別前方的靜止障礙物,因為其無法區(qū)分前方的車輛(真實障礙)和前方的橋梁/井蓋(虛假障礙)。在不頻繁觸發(fā)誤報的前提上,這會大大降低了障礙物感知的召回率。為了解決上述問題,目前已經(jīng)有4D雷達(dá)問世,可以實現(xiàn)較高精度的二維角度測量,如大陸的ARS548,但其在量產(chǎn)中的應(yīng)用效果尚缺乏驗證。同時目前的4D雷達(dá)成本也較高。
02、視覺感知
視覺傳感器以其低廉的價格、較高的分辨率以及豐富的信息等優(yōu)點在智能汽車環(huán)境感知技術(shù)領(lǐng)域被廣泛使用,但容易受到光照變化、遮擋等因素影響。在實際的檢測過程中,難以準(zhǔn)確地分割并提取車道線以及精確地定位目標(biāo)(車輛、行人等)。自動駕駛檢測過程中采用工業(yè)攝像機作為其視覺傳感器,該攝像機具有高圖像分辨率、較強的傳輸能力和抗干擾能力,并且類別有單目、雙目和三目三種類型。
(三目包含一個150°的廣角攝像頭用于監(jiān)視車輛周圍環(huán)境,一個52°的中距攝像頭和一個28°的遠(yuǎn)距攝像頭。)
純視覺感知在硬件方面較為單一,使用單目或多目作為傳感器采集信息即可;但在軟件方面需要更多的算法來進(jìn)行彌補。算法方面簡單劃分需要做到進(jìn)行車道線檢測(要對采集到的圖像中的車道線進(jìn)行實時地檢測,從而確定可行駛區(qū)域),目標(biāo)檢測(包括路上行人或其他交通工具-障礙物檢測與跟蹤等),交通信號識別等(在識別過程中還要考慮到天氣光線等的突然變化)。

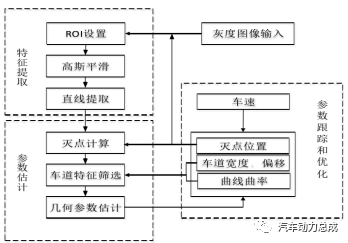
車道線檢測算法通??梢苑譃閮纱箢悾夯谑止みx擇特征的車道線檢測算法(包含以下四個步驟:圖像預(yù)處理、特征提取、車道線擬合和跟蹤)和基于卷積神經(jīng)網(wǎng)絡(luò)的車道線檢測算法;目標(biāo)檢測算法同樣可以分為兩大類:基于手工選擇特征的目標(biāo)檢測算法和基于卷積神經(jīng)網(wǎng)絡(luò)的目標(biāo)檢測算法;交通信號識別高速道路車道線結(jié)構(gòu)簡單且路面清晰,所以容易檢測。但在城市道路中,道路狀況復(fù)雜,而且光照變化大,車道線容易受到高樓、車輛等物體產(chǎn)生的陰影的影響。
對于視覺感知,早期的視覺方案以智能攝像頭方案為主,即只有1個前向的攝像頭,但可以在內(nèi)部實現(xiàn)感知算法,直接輸出目標(biāo)級的障礙物信息和車道線信息。因此可以用來做1R1V的融合或5R1V的融合。大大降低了主機廠的開發(fā)難度。目前的L2級自動駕駛大多還是這個路線。而像特斯拉的HW1.0–基于Mobileye芯片的第一代駕駛輔助硬件。它使用了單個EQ3系列攝像頭,單個毫米波雷達(dá)和12個中程超聲波傳感器,毫米波雷達(dá)是由博世提供,攝像頭布置于后視鏡附近,硬件選型都是基于市場上成熟的供應(yīng)商產(chǎn)品,在HW1.0階段特斯拉的主要工作也是多傳感器融合+應(yīng)用層軟件開發(fā)。特斯拉在2016年發(fā)布了基于自主研發(fā)視覺算法的自動駕駛系統(tǒng),這樣促使很多主機廠意識到多個圖像傳感器+深度學(xué)習(xí)感知計算平臺的方案實現(xiàn)遠(yuǎn)超過單個智能攝像頭的優(yōu)勢:車身360度的感知覆蓋、核心算法掌握在自己手里、可以通過數(shù)據(jù)驅(qū)動不斷升級迭代同時OTA。國內(nèi)最早發(fā)布自研視覺感知方案的是在2020年上市的小鵬P7上的XPilot 3.0系統(tǒng)。特斯拉裝的三目攝像頭和Stereo camera有很大差別,首先三目的三顆攝像頭不是為了fuse后提供立體視覺/測距,三目的每個攝像頭fov都不一樣,每一顆都有各自的使用場景,比如Narrow和Main用于高速NGP/LCC/ACC,Main,F(xiàn)isheye用于ALC,交通燈檢測,行人檢測等等,對了fisheye也用于雨量識別,三顆攝像頭各司其職。
03激光雷達(dá)
激光雷達(dá)是一種遙感技術(shù),其工作原理是發(fā)射反射目標(biāo)物體的紅外光束或激光脈沖。這些反射由儀器檢測,光脈沖發(fā)射和接收之間的時間間隔能夠估計距離。當(dāng)激光雷達(dá)掃描其周圍環(huán)境時,它會以點云的形式生成場景的 3D 表示。激光雷達(dá)通過對地面與物體表面進(jìn)行三維采樣,可以高效率的獲取大量三維點云數(shù)據(jù),點云中的每個點都了目標(biāo)的空間坐標(biāo)(x, y, z)和一些其他屬性信息(如反射強度 intensity),是現(xiàn)實世界簡單而真實的表征。
基于激光雷達(dá)三維點云的環(huán)境感知技術(shù)主要有立體柵格法、二維投影法與原始點云法。其中,立體柵格法將初始點云按照空間幾何關(guān)系體素化,轉(zhuǎn)換成含拓?fù)浣Y(jié)構(gòu)、具備相鄰相關(guān)性的三維柵格形式,再進(jìn)行后續(xù)處理;二維投影法(多視圖法)是先將初始 3D 點云數(shù)據(jù)映射到不同視角的平面上,轉(zhuǎn)換成諸如鳥瞰圖、前視圖等 2D 圖像,再輸入到算法中;原始點云法則是直接處理初始3D 點云。
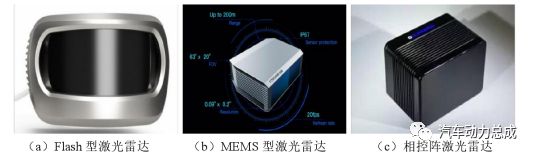
以射線數(shù)量為標(biāo)準(zhǔn)進(jìn)行分類,可以分為單線激光雷達(dá)和多線激光雷達(dá)。單線激光雷達(dá)因為其只能進(jìn)行平面式掃描,所以每幀獲得的數(shù)據(jù)量少,難以應(yīng)用于復(fù)雜多變的場景,目前較多應(yīng)用于場景簡單的室內(nèi)機器人領(lǐng)域,而多線激光雷達(dá),因為可以感知周圍的三維信息而被較多的被選擇用于車載平臺,用來獲取周圍復(fù)雜的環(huán)境信息。3D 激光雷達(dá)根據(jù)有無機械部件,分為固態(tài)激光雷達(dá)和機械式激光雷達(dá)。固態(tài)激光雷達(dá)又分為 Flash 型激光雷達(dá)、MEMS 型激光雷達(dá)和相控陣激光雷達(dá)三種。
對激光雷達(dá),其機械掃描的版本很早就應(yīng)用到各種無人車中,但由于量產(chǎn)車對品質(zhì)和價格的要求更高,因此直到2021年,國內(nèi)才開始發(fā)布搭載激光雷達(dá)的量產(chǎn)車,如小鵬P5搭載了兩顆 Livox覽沃科技提供的HAP激光雷達(dá),單個橫向視角120°,針對低反射物體探測距離可達(dá)150米,角分辨率高達(dá)0.16°*0.2°,點云密度等效于144線激光雷達(dá)。其他領(lǐng)頭羊如速騰聚創(chuàng)和禾賽科技都發(fā)布了車規(guī)級固態(tài)激光雷達(dá)。應(yīng)用于量產(chǎn)車的固態(tài)激光雷達(dá)滿足了車規(guī)級的質(zhì)量標(biāo)準(zhǔn),將成本從幾萬元下降到了數(shù)千元的量級,但也損失了360度的探測能力。另外,目前的高性能計算平臺也促進(jìn)了激光雷達(dá)的數(shù)據(jù)處理和目標(biāo)檢測性能提升,已經(jīng)從傳統(tǒng)基于規(guī)則的點云處理策略全面轉(zhuǎn)向基于深度學(xué)習(xí)的點云處理策略。
綜上所述,單一環(huán)境傳感器都有各自一定的缺陷性,兩兩搭配或三者相融合才能更準(zhǔn)確的感知環(huán)境,從環(huán)境中收集到更詳盡的信息,為之后的決策執(zhí)行做足準(zhǔn)備工作。根據(jù)對國內(nèi)外自動駕駛汽車的調(diào)研結(jié)果,因此可以將環(huán)境感知系統(tǒng)分為兩大類。一類以激光雷達(dá),以超聲波雷達(dá)、視覺相機等傳感器為輔。另一類則是以視覺相機為主,超聲波雷達(dá)和毫米波雷達(dá)為輔。以激光雷達(dá)為主的感知系統(tǒng)需要充分收集道路環(huán)境的 3D 數(shù)據(jù),建立精確的 3D 地圖,并標(biāo)注好可行駛區(qū)域以及交通標(biāo)識線等,然后利用高精度 GPS 獲取車輛位置信息,車輛、行人等目標(biāo)由激光雷達(dá)動態(tài)感知。Google 和百度等公司主要采用這種感知模式,在此類方案中,提前構(gòu)建好的高精地圖和實時感知的道路交通環(huán)境信息是關(guān)鍵所在。盡管交通環(huán)境感知精度高,但其價格昂貴,所以并不適合普遍使用。以視覺相機為主的環(huán)境感知系統(tǒng)同樣需要采集并標(biāo)注大量的數(shù)據(jù)集(車輛/非車輛、障礙物/非障礙物、車道線等),線下完成目標(biāo)檢測和圖像識別模型的訓(xùn)練。在自動駕駛汽車自主駕駛過程中,環(huán)境感知系統(tǒng)實時地檢測出車道線、車輛、行人、障礙物等目標(biāo),然后將感知到的信息傳遞給車載計算機,為決策系統(tǒng)做準(zhǔn)備。目前,寶馬、宇通等公司主要是以這種模式為主。以視覺相機為主的環(huán)境感知系統(tǒng)對算法的要求較高,它需要提前訓(xùn)練好高精度的檢測器,并且能夠準(zhǔn)確、快速地實現(xiàn)道路交通環(huán)境感知。但與以激光雷達(dá)為主的感知系統(tǒng)相比,其成本較低,更適合普遍推廣使用。
注:文章中引用數(shù)據(jù)和圖片來源網(wǎng)絡(luò)



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
