




 廣告
廣告





















































MEC與C-V2X融合應(yīng)用場景
2019-02-22 21:23:52· 來源:佐思汽車研究

3 車輛感知共享
MEC部署車輛感知共享功能,可將具備環(huán)境感知車輛的感知結(jié)果轉(zhuǎn)發(fā)至周圍其他車輛,用于擴(kuò)展其他車輛的感知范圍。也可以用于Seethrough場景,及當(dāng)前車遮擋后車視野時,前車對前方路況進(jìn)行視頻監(jiān)控并將視頻實(shí)時傳輸至MEC,MEC的車輛感知共享功能對收到的視頻進(jìn)行實(shí)時轉(zhuǎn)發(fā)至后方車輛,便于后方車輛利用視頻擴(kuò)展視野,有效解決汽車行駛中的盲區(qū)問題,提高車輛的駕駛安全。
在此場景中,MEC提供傳感信息、視頻流等信息的轉(zhuǎn)發(fā)功能,需要保證低時延、大帶寬的通信能力。在See-Through 應(yīng)用場景中,需要對跨基站、跨MEC的業(yè)務(wù)連續(xù)性提供必要支持。配置了車載傳感器/攝像頭和C-V2X通信模組的車輛可向其他車輛共享自身傳感信息,僅配置通信模組的車輛可接收其他車輛共享的傳感信息。
4 場景小結(jié)
在多車與MEC協(xié)同交互場景中,多個車輛與部署在MEC上的服務(wù)進(jìn)行交互,無需路側(cè)智能設(shè)施參與。典型場景對MEC的能力要求如表3。
表3 多車與MEC協(xié)同交互場景對MEC能力要求

多車與MEC及路側(cè)智能設(shè)施協(xié)同交互場景
1 場景概述
在C-V2X應(yīng)用中,匝道合流輔助、智慧交叉路口、大范圍協(xié)同調(diào)度等功能可通過多車、路側(cè)智能設(shè)施及MEC進(jìn)行協(xié)同交互實(shí)現(xiàn)。應(yīng)用場景如圖6所示:
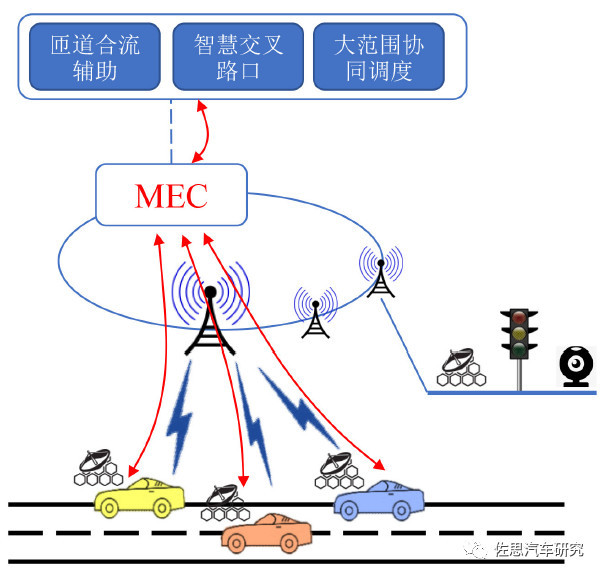
圖6 多車與MEC及路側(cè)智能設(shè)施協(xié)同交互場景示意圖
2 匝道合流輔助
MEC部署匝道合流輔助功能,在匝道合流匯入點(diǎn)部署監(jiān)測裝置(如攝像頭)對主路車輛和匝道車輛同時進(jìn)行監(jiān)測,并將監(jiān)測信息實(shí)時傳輸?shù)組EC,同時相關(guān)車輛也可以將車輛狀態(tài)信息發(fā)送至MEC,MEC的匝道合流輔助功能利用視頻分析、信息綜合、路況預(yù)測等應(yīng)用功能對車、人、障礙物等的位置、速度、方向角等進(jìn)行分析和預(yù)測,并將合流點(diǎn)動態(tài)環(huán)境分析結(jié)果實(shí)時發(fā)送相關(guān)車輛,提升車輛對于周邊環(huán)境的感知能力,減少交通事故,提升交通效率。
在此場景中,MEC提供用于監(jiān)測信息分析及環(huán)境動態(tài)預(yù)測的計(jì)算能力,以及低時延、大帶寬的通信能力。車輛可通過Uu通信模式與MEC直接交互,或通過PC5通信模式經(jīng)RSU與MEC進(jìn)行交互。
3 智慧交叉路口
MEC部署智慧交叉路口功能,交叉路口處的路側(cè)智能傳感器(如攝像頭、雷達(dá)等)將路口處探測的信息發(fā)送至MEC,同時相關(guān)車輛也可以將車輛狀態(tài)信息發(fā)送至MEC。MEC的智慧交叉路口功能通過信號處理、視頻識別、信息綜合等應(yīng)用功能對交叉路口周邊內(nèi)的車輛、行人等位置、速度和方向角等進(jìn)行分析和預(yù)測,并將分析結(jié)果實(shí)時發(fā)送至相關(guān)車輛,綜合提升車輛通過交叉路口的安全性和舒適性;同時MEC的可以通過收集和分析相關(guān)信息,對交通信號燈各相位配時參數(shù)進(jìn)行優(yōu)化,提高交叉路口的通行效率。
在此場景中,MEC提供用于路側(cè)感知信息分析及路況動態(tài)預(yù)測的計(jì)算能力,以及低時延、大帶寬的通信能力。車輛可通過Uu通信模式與MEC直接交互,或通過PC5通信模式經(jīng)RSU與MEC進(jìn)行交互。
4 大范圍協(xié)同調(diào)度
MEC部署大范圍協(xié)同調(diào)度功能,可在重點(diǎn)路段、大型收費(fèi)口處借助視頻傳感信息,通過MEC進(jìn)行路況分析和統(tǒng)一調(diào)度,實(shí)現(xiàn)一定范圍內(nèi)大規(guī)模車輛協(xié)同、車輛編隊(duì)行駛等功能?;蛟诔鞘屑墝?dǎo)航場景中,MEC根據(jù)區(qū)域車輛密度、道路擁堵嚴(yán)重程度、擁堵節(jié)點(diǎn)位置以及車輛目標(biāo)位置等信息,利用路徑優(yōu)化的算法對車輛開展導(dǎo)航調(diào)度,避免擁堵進(jìn)一步惡化。
在此場景中,MEC收集多種傳感信息及大量車輛狀態(tài)信息,提供海量數(shù)據(jù)處理、綜合路徑規(guī)劃等計(jì)算能力,提供各類綜合信息的存儲能力,并提供與中心云平臺進(jìn)行交互的能力。此外,在大范圍導(dǎo)航規(guī)劃應(yīng)用中,MEC還應(yīng)提供對跨基站、跨MEC業(yè)務(wù)連續(xù)性的必要支持。MEC的部署位置可根據(jù)接入用戶數(shù)和服務(wù)范圍靈活選擇。在網(wǎng)絡(luò)部署了MEC及相應(yīng)的功能服務(wù)后,具備對應(yīng)通信模組的車輛可以直接使用此類服務(wù)。
5 場景小結(jié)
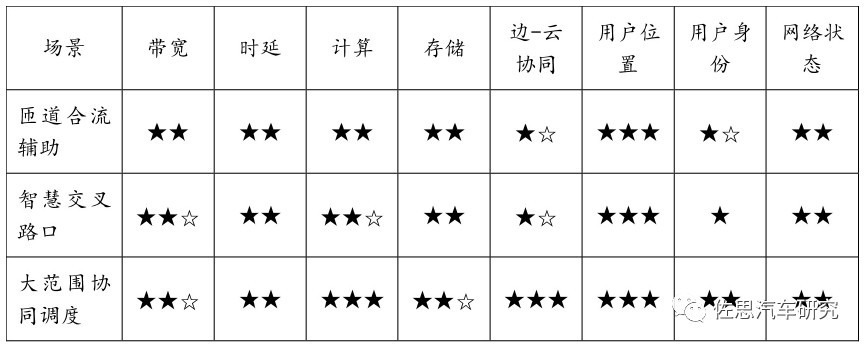
在多車與MEC及路側(cè)智能設(shè)施交互場景中,多個車輛、路側(cè)智能設(shè)施與部署在MEC上的服務(wù)進(jìn)行交互。典型場景對MEC的能力要求如表4。
表4 多車與MEC及路側(cè)智能設(shè)施協(xié)同交互場景對MEC能力要求
未來工作
在未來工作中,工作組將從以下幾方面開展工作,持續(xù)推動MEC與C-V2X融合發(fā)展。
一是推動從時延、帶寬、計(jì)算能力、存儲資源、開放與協(xié)同能力、移動性支持等指標(biāo)對MEC能力進(jìn)行簡單參考性分級,以加強(qiáng)應(yīng)用場景需求與MEC網(wǎng)絡(luò)或硬件能力的對應(yīng)與匹配,推進(jìn)MEC與C-V2X融合場景分步應(yīng)用與發(fā)展。
二是推動MEC與C-V2X融合的標(biāo)準(zhǔn)化工作,規(guī)范數(shù)據(jù)接口與服務(wù)流程,積極聯(lián)合產(chǎn)業(yè)各方主體共同開展測試床建設(shè),為MEC與C-V2X融合的場景功能、平臺性能、應(yīng)用部署等提供測試環(huán)境,盡快開展解決方案的驗(yàn)證性測試,并利用測試結(jié)果對未來技術(shù)與產(chǎn)業(yè)的發(fā)展提供支撐。
三是持續(xù)開展深入研究,從技術(shù)與標(biāo)準(zhǔn)化方案、產(chǎn)業(yè)現(xiàn)狀與趨勢、商業(yè)模式等角度進(jìn)一步深入探討MEC與C-V2X融合的發(fā)展路線,并進(jìn)行總結(jié)和成果輸出。
主要貢獻(xiàn)單位




 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
