




 廣告
廣告





















































TPA分析的目的
2019-08-27 00:53:05· 來源:模態(tài)空間 作者:譚祥軍

模態(tài)空間第二本NVH圖書《模態(tài)試驗實用技術(shù):實踐者指南》正在預(yù)售中,搜索關(guān)注模態(tài)空間公眾號咨詢。在源-路徑-接受者模型中的接受者一側(cè),作為接受者的人體可以
模態(tài)空間第二本NVH圖書《模態(tài)試驗實用技術(shù):實踐者指南》正在預(yù)售中,搜索關(guān)注“模態(tài)空間”公眾號咨詢。
在“源-路徑-接受者”模型中的接受者一側(cè),作為接受者的人體可以將振動,如座椅導(dǎo)軌振動、方向盤振動,或噪聲,如耳旁噪聲,設(shè)置為目標(biāo)測量量?;蛘咄瑫r將二者設(shè)置為目標(biāo)測量量。當(dāng)目標(biāo)量為噪聲時,人們經(jīng)常把噪聲分為結(jié)構(gòu)聲和空氣聲。目標(biāo)點的噪聲由結(jié)構(gòu)激勵引起的,則為結(jié)構(gòu)路徑;由源因表面振動引起源周圍的空氣振動傳遞到目標(biāo)點的路徑為空氣路徑。但實際上,目標(biāo)為振動時,也可能由結(jié)構(gòu)振動路徑或空氣路徑所引起,因此,存在兩類激勵和兩類目標(biāo),對應(yīng)四種可能的路徑類型,如圖1所示,即目標(biāo)點的振動可以是結(jié)構(gòu)激勵或聲音激勵引起的;目標(biāo)點的噪聲可是以結(jié)構(gòu)聲或空氣聲引起的。
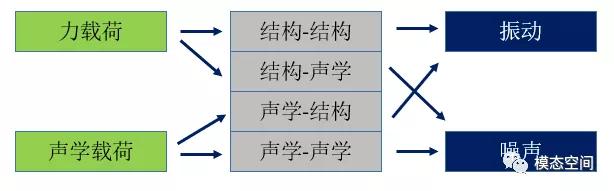
圖1 四種可能的路徑類型
當(dāng)進行TPA分析時,需要同時考慮所有可能的路徑類型,這意味著我們能比較每條路徑對每個目標(biāo)點的貢獻量。這樣一來,就可以確定哪條路徑傳遞的能量最多,不同路徑之間是如何影響的,是由空氣路徑傳遞的還是由結(jié)構(gòu)路徑傳遞的,以及是系統(tǒng)問題還是源的問題,或者二者都有問題。如圖2所示,在右側(cè)的第一種情況中,由于激勵存在相應(yīng)的峰值,因此,在目標(biāo)點響應(yīng)中也出現(xiàn)了峰值,這是由激勵源引起的。而在第二列中,由于結(jié)構(gòu)的傳遞特性有共振峰,因此,響應(yīng)中也出現(xiàn)與結(jié)構(gòu)特性相對應(yīng)的峰值。而第三種情況則是最糟糕的情況,因為激勵源產(chǎn)生的載荷和結(jié)構(gòu)特性都有峰值,并且激勵對應(yīng)的頻率峰值與結(jié)構(gòu)第一階固有頻率相等,導(dǎo)致結(jié)構(gòu)會出現(xiàn)明顯的共振特性,因而,將導(dǎo)致目標(biāo)點處的響應(yīng)很大,存在明顯的振動噪聲問題。
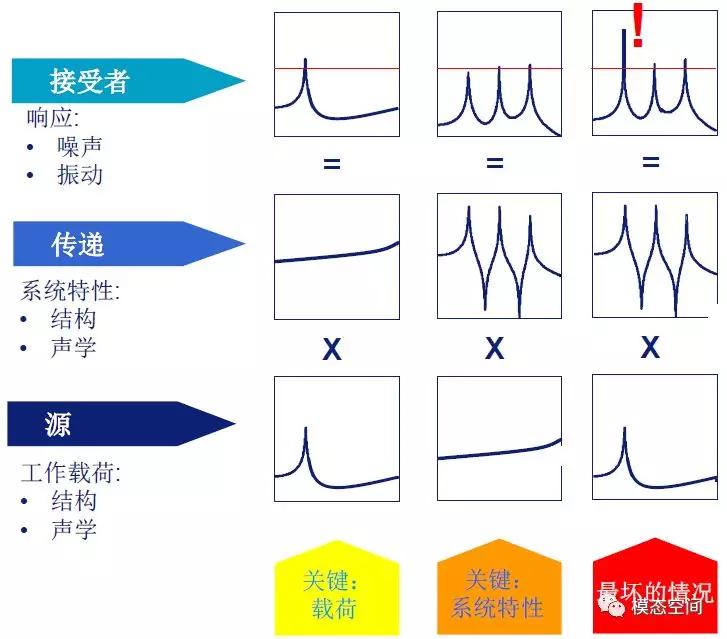
圖2 不同的情況
為了確定到底是系統(tǒng)問題還是源問題,我們需要對結(jié)構(gòu)進行工況數(shù)據(jù)和傳遞函數(shù)測量。測量工況數(shù)據(jù)時,激勵源處于正常工作狀態(tài)下,而在實驗室中測量傳遞函數(shù)時,需要把激勵源拆除,這是因為如果激勵源存在,可能導(dǎo)致不同的路徑之間相互影響,從而傳遞函數(shù)測量不準(zhǔn)確。本質(zhì)上,如果你只是考慮實驗室測量(傳遞函數(shù)測量),那么只可能是對系統(tǒng)問題進行調(diào)查,沒有考慮任何源的貢獻,而工況數(shù)據(jù)同時考慮源和系統(tǒng)的作用。通過聯(lián)合兩類測量數(shù)據(jù),可以指出結(jié)構(gòu)所處的問題到底屬于圖2中三種情況的哪一種。
為了能夠比較每條路徑的重要性,我們需要量化有多少能量從源這一側(cè)流向到了接受者一側(cè)。這可以通過測量目標(biāo)點的響應(yīng)進行判斷,如駕駛員耳旁噪聲,它是所有路徑在目標(biāo)點的貢獻之和。一條路徑的貢獻量等于在那條路徑位置的激勵引起的一部分目標(biāo)點的響應(yīng),也等于路徑輸入點到目標(biāo)點的傳遞函數(shù)與路徑輸入點的工作載荷的乘積。由于目標(biāo)點的響應(yīng)是所有路徑在目標(biāo)點處產(chǎn)生響應(yīng)疊加得到的,因此,可以比較每條路徑在目標(biāo)點處產(chǎn)生的響應(yīng)的大小,也就是所謂的各條路徑對目標(biāo)點總響應(yīng)的貢獻量。通過比較不同路徑的貢獻,我們可以指出需要進一步調(diào)查的重要路徑。
當(dāng)比較結(jié)構(gòu)路徑和聲學(xué)路徑時,二者實質(zhì)上是相同的方式,細微的差別在于結(jié)構(gòu)路徑的傳遞函數(shù)稱為頻響函數(shù)(VTF),而聲學(xué)路徑的傳遞函數(shù)稱為噪聲傳遞函數(shù)(NTF)。目標(biāo)點測量的響應(yīng)是所有路徑貢獻之和,所以,結(jié)構(gòu)路徑和聲學(xué)路徑可以按相同的方式處理,不需要區(qū)別對待。實際在處理過程中,是按矩陣的形式來處理的,系統(tǒng)矩陣同時包含了聲學(xué)路徑和結(jié)構(gòu)路徑到目標(biāo)點的傳遞函數(shù),系統(tǒng)矩陣乘以由聲學(xué)載荷和力載荷組成的載荷向量得到目標(biāo)點的響應(yīng)向量。
一旦知道了哪一條或幾條路徑對接受者的貢獻最大,我們就可以對這些路徑做進一步的調(diào)查。導(dǎo)致路徑產(chǎn)生貢獻大的原因可能是激勵源或者是系統(tǒng)的傳遞路徑引起的,或者二者同時作用。
比如,車內(nèi)不希望出現(xiàn)的噪聲的一個重要的貢獻者可能是渦輪增壓器通過空氣路徑傳遞到駕駛員耳朵的噪聲。如果渦輪增壓器輻射了大量的1階噪聲,在1階頻率處將有大的體積速度激勵車身,在車內(nèi)將出現(xiàn)這1階噪聲。改善這一階噪聲的一個可能辦法是減少渦輪增壓器軸的不平衡量。另一個可能的方法是在渦輪增壓器內(nèi)壁鋪設(shè)吸音材料或者用隔音材料包裹渦輪增壓器外壁。

圖3 渦輪增壓器
另外一個例子是接受者側(cè)的問題與系統(tǒng)的傳遞特性相關(guān)。如果車輛有一階固有頻率在200Hz處,任何來自發(fā)動機懸置處的激勵在那個頻率處將導(dǎo)致車內(nèi)產(chǎn)生較大的振動和與之相關(guān)的噪聲,即使這個激勵力的量級較低。這種情況下,我們可以嘗試加強車身的剛度,使這階固有頻率往上移動;或者也可以使發(fā)動機的轉(zhuǎn)速不超過6000rpm,這樣能保證發(fā)動機的2階次不會激勵車身產(chǎn)生共振問題。
對于傳統(tǒng)的降噪手段而言,通常是針對噪聲頻譜中幅值大的噪聲,這有點類似打鼴鼠游戲(見圖4),哪個頻率的幅值高就消除或降低哪個頻率。但對于TPA分析(其他也類似)來說,這種打鼴鼠式降噪方法不一定行得通。這是因為當(dāng)我們努力去消除或降低一條重要的路徑貢獻量時,必須保證這條路徑不會抵消其他路徑的貢獻量。當(dāng)兩條路徑貢獻量的幅值相當(dāng),但相位差不多反相時,消除兩條路徑中的一條將會使原始要改善的問題更加嚴(yán)重。如圖5所示,P1和P2路徑對應(yīng)的噪聲幅值大小相當(dāng),相位差接近180度,這樣當(dāng)兩條路徑同時存在時,目標(biāo)處的實際噪聲大小為Ptot,它的大小小于P1,但是當(dāng)消除P2之后,目標(biāo)處的噪聲大小為P1,這時消除P2反而增大了目標(biāo)處的噪聲,使問題更加嚴(yán)重。因此,降噪時除了從幅值大小來考慮之外,還應(yīng)考慮相位關(guān)系。
圖4 打鼴鼠游戲
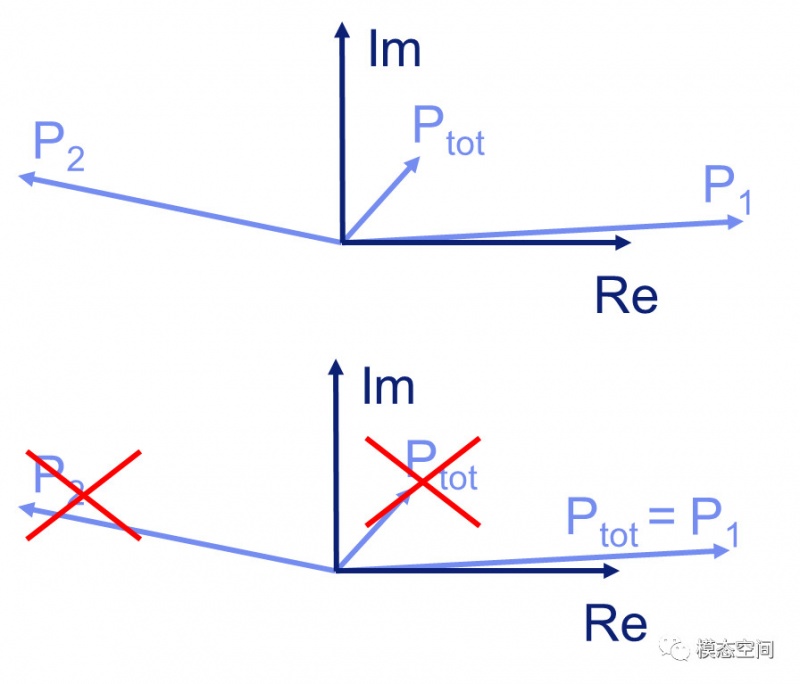
圖5 兩條路徑起到相互抵消的作用
當(dāng)我們獲得模態(tài)結(jié)果之后,可以對結(jié)構(gòu)再進行修改,如添加質(zhì)量、阻尼或動力吸振器等,獲得修改之后的模態(tài)結(jié)果,也就是所謂的修改預(yù)測功能,從而指導(dǎo)我們進行實際的工程決策。相同的道理,在進行TPA分析之后,可以對路徑進行調(diào)查,如修改某條路徑的工況數(shù)據(jù),或懸置動剛度曲線,或路徑輸入點到目標(biāo)的傳遞函數(shù),然后再計算修改之后的貢獻量,對比修改前后的變化,從而指導(dǎo)實際的工程決策。



 廣告
廣告 



最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
