




 廣告
廣告





















































基于后驅(qū)動橋機械特性的總成疲勞試驗方法研究
2019-09-14 11:33:00· 來源:汽車技術(shù)研究所

在商用車領(lǐng)域,車橋和發(fā)動機、駕駛室一起構(gòu)成商用車的核心三部件,其重要性不言而喻。早期,我國的部分企業(yè)通過引進國外技術(shù),并經(jīng)過大量研究與生產(chǎn),逐步建立起
在商用車領(lǐng)域,車橋和發(fā)動機、駕駛室一起構(gòu)成商用車的核心三部件,其重要性不言而喻。早期,我國的部分企業(yè)通過引進國外技術(shù),并經(jīng)過大量研究與生產(chǎn),逐步建立起了車橋的研發(fā)生產(chǎn)體系,但和國外先進技術(shù)相比,仍然有不小的差距。為了配合國內(nèi)車橋企業(yè)取得核心技術(shù)上的突破,參與國際市場的激烈競爭,國內(nèi)的國家級機動車檢測機構(gòu)有義務(wù)和責任為車橋生產(chǎn)廠商提供準確的車橋試驗結(jié)果。
為了保證試驗結(jié)果的準確,必須確保以下兩個方面:
(1)試驗項目的準確。車橋的試驗項目眾多,在以車橋總成進行某一項試驗時,須確保不被另一試驗項目所干擾。以總成疲勞試驗為例,其試驗目的為驗證主減速齒輪對及其軸承的壽命,若在試驗進行過程中,由于裝夾方式不當?shù)纫蛩?,導致差速器或者橋殼損壞,試驗終止,則認為該試驗項目受到干擾,并不能得到主減速齒輪對及其軸承壽命的準確結(jié)果;
(2)試驗方法的準確。在排除掉其他項目干擾的前提下,還得使用適宜的方法來進行試驗。仍然以總成疲勞試驗為例,進行試驗時,需要使用電動機及測功機為車橋提供誤差允許范圍內(nèi)的輸入輸出扭矩和轉(zhuǎn)速。為實現(xiàn)這一目標,可對電動機和測功機進行不同方法的控制,但車橋是一個總成系統(tǒng),不同的控制方式會影響到總成內(nèi)其他機構(gòu),從而對主減速齒輪對及其軸承壽命的結(jié)果產(chǎn)生影響。
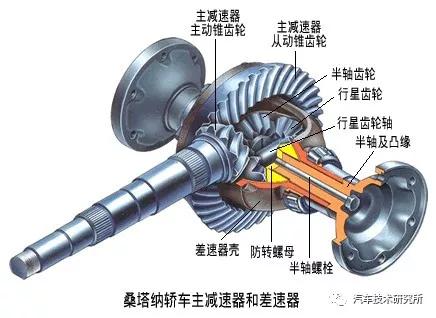
后驅(qū)動橋為車橋的一種典型代表,在一般的汽車結(jié)構(gòu)中,驅(qū)動橋包括主減速器(又稱主傳動器)、差速器、驅(qū)動車輪的傳動裝置及橋殼等部件[1]。本文作者以后驅(qū)動橋為例,通過分析對比不同的試驗控制方法,探討后驅(qū)動橋總成疲勞試驗方法的優(yōu)劣。
1 試驗控制方法介紹
進行后驅(qū)動橋總成疲勞試驗,在溫度穩(wěn)定控制的情況下,須為后驅(qū)動橋提供誤差允許范圍內(nèi)的輸入輸出扭矩和轉(zhuǎn)速。為實現(xiàn)這一目標,有兩種控制模式對電動機和測功機進行控制。
控制方法一:電動機采用轉(zhuǎn)速模式,測功機采用扭矩模式,如圖1所示??刂七^程為電動機先調(diào)節(jié)后驅(qū)動橋輸入轉(zhuǎn)速至目標轉(zhuǎn)速,待轉(zhuǎn)速穩(wěn)定后,再調(diào)節(jié)雙側(cè)測功機進行加載至目標扭矩,并維持穩(wěn)定狀態(tài)運轉(zhuǎn)。
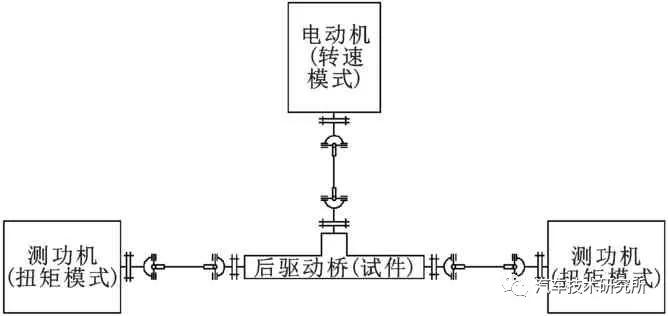
圖1 控制模式一
控制方法二:啟動時電動機采用扭矩模式,測功機采用轉(zhuǎn)速模式,待穩(wěn)定后,電動機采用轉(zhuǎn)速模式,測功機采用扭矩模式,如圖2所示。控制過程為啟動時雙側(cè)測功機先同時調(diào)節(jié)后驅(qū)動橋輸出轉(zhuǎn)速至目標轉(zhuǎn)速,待轉(zhuǎn)速穩(wěn)定后,再調(diào)節(jié)電動機進行加載至目標扭矩,待轉(zhuǎn)速扭矩均穩(wěn)定后,改變電動機至轉(zhuǎn)速模式,改變雙側(cè)測功機至扭矩模式,并維持穩(wěn)定狀態(tài)運轉(zhuǎn)。
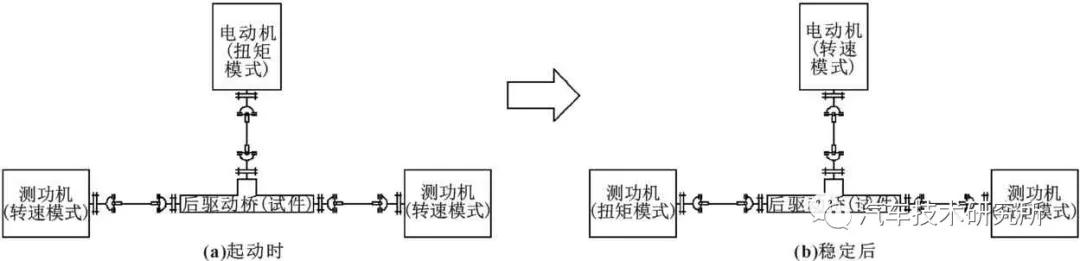
圖2 控制模式二
2 后驅(qū)動橋總成轉(zhuǎn)速扭矩關(guān)系分析

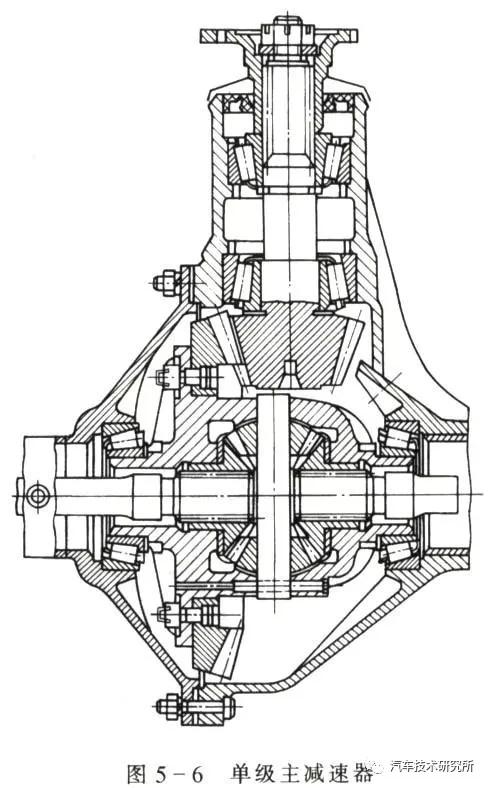
要探討兩種控制方式的優(yōu)劣,需要對后驅(qū)動橋的機械結(jié)構(gòu)進行轉(zhuǎn)速扭矩關(guān)系的分析。對試驗影響最大的,實為后驅(qū)動橋內(nèi)部差速器的轉(zhuǎn)速扭矩關(guān)系,結(jié)構(gòu)簡圖如圖3所示。
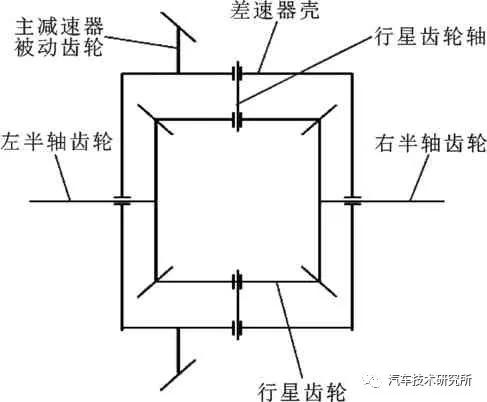
圖3 差速器結(jié)構(gòu)
2.1 轉(zhuǎn)速關(guān)系分析
根據(jù)機械原理中周轉(zhuǎn)輪系的分析方法,應先把周轉(zhuǎn)輪系轉(zhuǎn)化為定軸輪系,再利用定軸輪系的分析方法進行分析。在差速器系統(tǒng)中,假設(shè)將該周轉(zhuǎn)輪系中支承行星輪的系桿H固定,即差速器殼固定,左半軸齒輪、行星齒輪、右半軸齒輪和差速器殼所構(gòu)成的周轉(zhuǎn)輪系則形成了一個定軸輪系[2]。但由于是人為地將差速器殼轉(zhuǎn)速置為0,此時左半軸齒輪、右半軸齒輪在定軸輪系中的轉(zhuǎn)速為與差速器殼轉(zhuǎn)速的相對轉(zhuǎn)速,轉(zhuǎn)速關(guān)系分別為
左半軸齒輪相對轉(zhuǎn)速:

式中:n左為左半軸齒輪實際轉(zhuǎn)速;n殼為差速器殼實際轉(zhuǎn)速。
右半軸齒輪相對轉(zhuǎn)速:

式中:n右為右半軸齒輪實際轉(zhuǎn)速;n殼為差速器殼實際轉(zhuǎn)速。
由于差速器系統(tǒng)中,行星齒輪軸軸線與左、右半軸齒輪軸軸線并不平行,屬于空間周轉(zhuǎn)輪系,因此不能以上述表達式得出行星齒輪的相對轉(zhuǎn)速,但從左半軸齒輪到行星齒輪再到右半軸齒輪為逐級嚙合狀態(tài),且左半軸齒輪軸軸線與右半軸齒輪軸軸線處于平行狀態(tài),仍然能夠通過此種方法得出差速器系統(tǒng)的轉(zhuǎn)速關(guān)系。
根據(jù)定軸輪系的轉(zhuǎn)速關(guān)系計算規(guī)則,可得:

式中:z左為左半軸齒輪齒數(shù);z右為右半軸齒輪齒數(shù);z行為行星齒輪齒數(shù)。
在差速器中,左、右半軸齒輪齒數(shù)是相等的,即z左=z右,負號表示左、右半軸齒輪的旋轉(zhuǎn)方向相反,對式(3)進行整理得:
n左+n右=2n殼
(4)
由此可見,差速器系統(tǒng)為一個2自由度系統(tǒng)。
2.2 扭矩關(guān)系分析
在差速器穩(wěn)定運行的狀態(tài)下,左半軸齒輪、右半軸齒輪和差速器殼在外扭矩的作用下作等速旋轉(zhuǎn),以行星齒輪受力情況作分析,如圖4所示。
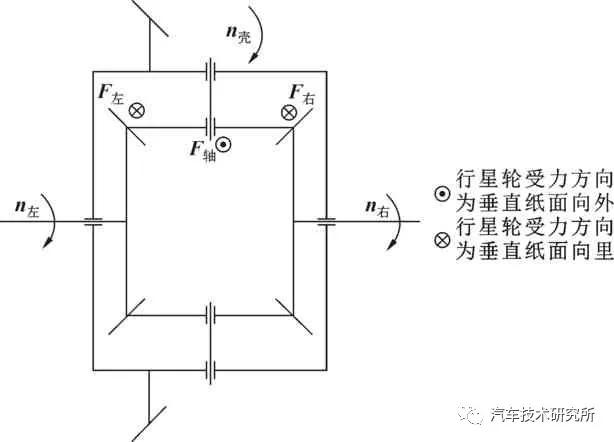
圖4 行星齒輪受力分析
行星輪處于穩(wěn)定運行狀態(tài),將受左、右半軸齒輪的作用力對行星輪軸取矩,可得:
F左×R行=F右×R行
(5)
式中:F左為左半軸齒輪對行星齒輪的作用力;F右為右半軸齒輪對行星齒輪的作用力;R行為行星齒輪分度圓半徑。
即F左=F右,又由于左半軸齒輪分度圓半徑R左與右半軸齒輪分度圓半徑R右相等,可得:
T左=F左×R左=F右×R右=T右
(6)
式中:T左為左半軸齒輪所受外部力矩;T右為右半軸齒輪所受外部力矩。
再以差速器系統(tǒng)作穩(wěn)態(tài)分析,系統(tǒng)所受外力矩處于平衡狀態(tài):
T左+T右+T殼=0
(7)
式中:T殼為差速器殼所受外部力矩。
結(jié)合式(6)、式(7),可得:
T殼=-2T左=-2T右
(8)
負號表示力矩方向相反,可進一步對式(8)整理為
T左∶T右∶T殼=1∶1∶-2
(9)
綜合以上對轉(zhuǎn)速扭矩關(guān)系的分析,可以得出差速器是一個定矩差速系統(tǒng)[3]。
3 控制方法對比
正是因為差速器具有定矩差速的特性,對后驅(qū)動橋總成疲勞試驗的控制過程產(chǎn)生了影響,從而影響了試驗結(jié)果的準確性。
在用控制方法一進行控制的過程中,由于差速器系統(tǒng)具有2個自由度,使用電動機進行轉(zhuǎn)速控制只限制了該系統(tǒng)1個自由度,即差速器殼的自由度,同時雙側(cè)測功機和連接后驅(qū)動橋的傳動軸等陪試部件的轉(zhuǎn)動慣量、內(nèi)部阻力等各不相同,導致在用電動機進行轉(zhuǎn)速控制的過程中,容易出現(xiàn)兩側(cè)輸出端輸出轉(zhuǎn)速不相等的情況,在這種情況下對雙側(cè)測功機進行加載,如果兩側(cè)加載出現(xiàn)不平衡的情況,則兩側(cè)輸出轉(zhuǎn)速差將進一步擴大,輸出轉(zhuǎn)速較低的一側(cè)轉(zhuǎn)速會迅速減小至0,整個調(diào)節(jié)過程失敗,需從頭開始。通常雙輸出側(cè)剛出現(xiàn)轉(zhuǎn)速差的情況時可以在輸出轉(zhuǎn)速較高的一側(cè)通過控制測功機增加適量的扭矩進行控制,但由于很難有效地量化需要增加的扭矩值,有時效果并不理想。
然而使用控制方法二能夠解決這一問題,使用測功機進行轉(zhuǎn)速控制,同時限制了差速器系統(tǒng)的2個自由度,差速器系統(tǒng)各結(jié)構(gòu)件的轉(zhuǎn)速自開始調(diào)節(jié)到目標轉(zhuǎn)速始終處于穩(wěn)定狀態(tài),電動機用扭矩控制模式從輸入端開始加載時,利用了差速器系統(tǒng)定矩的特性,輸入扭矩按比例分配給雙側(cè)輸出端,待輸入輸出轉(zhuǎn)速扭矩處于穩(wěn)定狀態(tài)后,再切換電動機至轉(zhuǎn)速控制模式、測功機至扭矩控制模式,此時即使有小的擾動,電機也可通過自身進行動態(tài)調(diào)節(jié),將狀態(tài)維持穩(wěn)定。
4 結(jié)論
通過比較,可以發(fā)現(xiàn)控制方法二明顯優(yōu)于控制方法一,在多個實際試驗中,結(jié)論得到了證明,同時,差速器耐久試驗是該分析成立的又一有效佐證(差速器耐久試驗要求雙側(cè)測功機先使用轉(zhuǎn)速控制模式使雙側(cè)輸出端形成特定轉(zhuǎn)速差,再通過電動機進行扭矩控制輸入固定波形的扭矩)。
參考文獻:
[1]劉惟信.汽車車橋設(shè)計[M].北京:清華大學出版社,2004.
[2]張春林.機械原理[M].北京:高等教育出版社,2006.
[3]閆清東.坦克構(gòu)造與設(shè)計[M].北京:北京理工大學出版社,2007.



 廣告
廣告 



最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
