




 廣告
廣告





















































首頁(yè) > 汽車測(cè)試技術(shù) > 正文
混合動(dòng)力系統(tǒng)發(fā)動(dòng)機(jī)工況切換特性研究
2019-10-08 23:51:15· 來(lái)源:內(nèi)燃機(jī)學(xué)報(bào)

混合動(dòng)力汽車是解決目前汽車能量利用率低與尾氣污染問(wèn)題的重要途徑,混合動(dòng)力系統(tǒng)的輔助功率單元(APU)是給動(dòng)力電池充電或直接驅(qū)動(dòng)電機(jī)的關(guān)鍵部分。為進(jìn)一步提
混合動(dòng)力汽車是解決目前汽車能量利用率低與尾氣污染問(wèn)題的重要途徑,混合動(dòng)力系統(tǒng)的輔助功率單元(APU)是給動(dòng)力電池充電或直接驅(qū)動(dòng)電機(jī)的關(guān)鍵部分。為進(jìn)一步提高增程式混合動(dòng)力汽車?yán)m(xù)駛里程,使發(fā)動(dòng)機(jī)在最佳工況下工作,研究APU控制策略是重要的方法之一。
增程式混合動(dòng)力系統(tǒng)模式切換過(guò)程的快速性、平順性直接關(guān)乎整車的能耗、排放及舒適性,而動(dòng)態(tài)過(guò)程控制的目的正是為了解決在混合動(dòng)力模式切換過(guò)程中,各轉(zhuǎn)動(dòng)部件之間耦合時(shí)出現(xiàn)的動(dòng)力輸出不平穩(wěn)或轉(zhuǎn)矩不足和超調(diào)等問(wèn)題。該文通過(guò)增程式混合動(dòng)力系統(tǒng)臺(tái)架試驗(yàn),基于精確轉(zhuǎn)矩的動(dòng)態(tài)協(xié)調(diào)控制系統(tǒng),研究“發(fā)動(dòng)機(jī)-發(fā)電機(jī)”系統(tǒng)的快速切換性能,期望切換過(guò)程中APU系統(tǒng)始終處在最低油耗區(qū),并保持發(fā)動(dòng)機(jī)較小的轉(zhuǎn)速和轉(zhuǎn)矩超調(diào)量。
01、APU工況點(diǎn)的選取
該文以某款D19增壓中冷柴油機(jī)為研究對(duì)象,其排量為1.85L,最大功率為70kW。在圖1中,每個(gè)最低等效燃油消耗點(diǎn)連起來(lái)形成的曲線,即APU系統(tǒng)的最佳工作曲線,選取3個(gè)最佳工況點(diǎn):A點(diǎn)(1500rpm,85N·m)、B點(diǎn)(2420rpm,185N·m)和C點(diǎn)(2785rpm,222N·m)??刂七壿嫳砣绫?所示,其中,C為荷電狀態(tài)。

圖1 APU等效燃油消耗率MAP圖
表1 APU工況點(diǎn)控制邏輯表

02
試驗(yàn)系統(tǒng)及方案

本試驗(yàn)的主要目的是利用臺(tái)架對(duì)APU控制策略進(jìn)行研究,試驗(yàn)系統(tǒng)如圖2所示。APU主要的工作切換過(guò)程有:(1)起動(dòng)→發(fā)動(dòng)機(jī)怠速工況點(diǎn);(2)怠速工況工況點(diǎn)→A工況點(diǎn);(3)A工況點(diǎn)→B工況點(diǎn);(4)B工況點(diǎn)→C工況點(diǎn);(5)C工況點(diǎn)→B工況點(diǎn);(5)B工況點(diǎn)→A工況點(diǎn)。
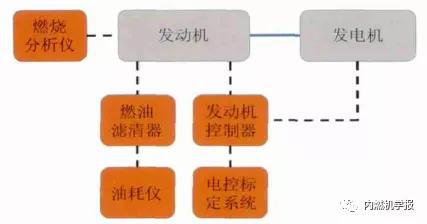
圖2 試驗(yàn)方案圖
03、試驗(yàn)過(guò)程及討論
3.1啟動(dòng)過(guò)程
起動(dòng)過(guò)程試驗(yàn)方案:對(duì)比3個(gè)目標(biāo)怠速轉(zhuǎn)速(950rpm、1200rpm、1500rpm)及4組不同噴油策略(正常噴油、0-200rpm時(shí)不噴油、0-200rpm時(shí)按照50N·m噴油、0-200rpm時(shí)按照100N·m噴油)下APU的起動(dòng)過(guò)程。試驗(yàn)發(fā)現(xiàn),可以通過(guò)提高發(fā)動(dòng)機(jī)怠速轉(zhuǎn)速的方法加快暖機(jī)過(guò)程,而且不會(huì)引起起動(dòng)過(guò)慢的問(wèn)題,而且為了降低系統(tǒng)的油耗,可以在發(fā)動(dòng)機(jī)起動(dòng)初期適當(dāng)降低噴油量甚至斷油,而不會(huì)影響發(fā)動(dòng)機(jī)的起動(dòng)性能。
3.2 怠速切換到A點(diǎn)
系統(tǒng)在穩(wěn)態(tài)工作時(shí),使用的是比例積分(PI)控制器。怠速、A工況點(diǎn)采用的P參數(shù)均為0.4、I參數(shù)均為0.1,該過(guò)程APU軸系加速轉(zhuǎn)矩、動(dòng)力學(xué)特性分別如圖3、4所示。
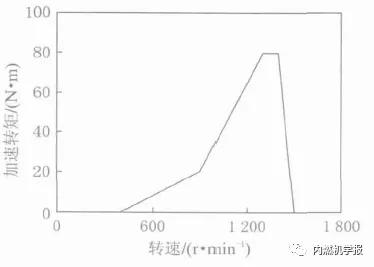
圖3 怠速到A工況點(diǎn)切換過(guò)程加速轉(zhuǎn)矩
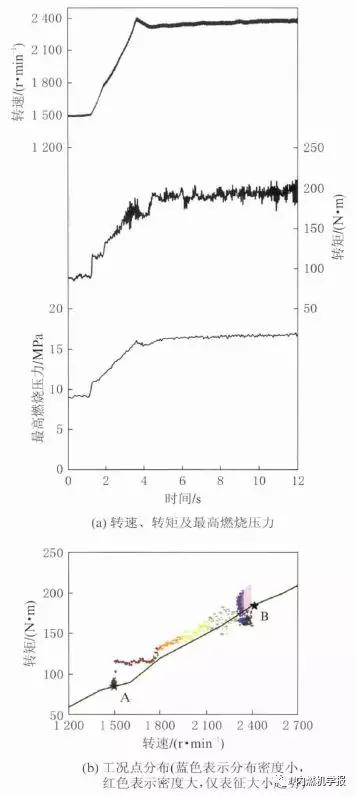
圖4 怠速到A工況點(diǎn)切換過(guò)程動(dòng)力學(xué)特性
由圖4可以看到,0-2.5s時(shí),發(fā)動(dòng)機(jī)在怠速工況下穩(wěn)定運(yùn)行,油門開度為0,噴油量為7mg/cycle。在2.5s時(shí)刻,發(fā)動(dòng)機(jī)油門開度開始逐漸增加,發(fā)動(dòng)機(jī)噴油量和缸內(nèi)最高燃燒壓力隨著發(fā)動(dòng)機(jī)油門開度增加而增加。APU軸系的轉(zhuǎn)速迅速增加到1450rpm,此時(shí)進(jìn)入A工況點(diǎn)PI調(diào)節(jié)。整體來(lái)看:APU系統(tǒng)運(yùn)行平穩(wěn),運(yùn)行工況點(diǎn)基本分布在最佳等效油耗曲線附近;切換過(guò)程用時(shí)也很短,只有約2.5s;轉(zhuǎn)速幾乎沒(méi)有超調(diào),轉(zhuǎn)矩超調(diào)量約為15N·m。
3.3 A點(diǎn)切換到B點(diǎn)
A、B工況點(diǎn)采用的P參數(shù)均為0.4、I參數(shù)均為0.05,該過(guò)程APU軸系加速轉(zhuǎn)矩、動(dòng)力學(xué)特性分別如圖5、6所示。在0-1.2s期間,APU系統(tǒng)在A工況點(diǎn)穩(wěn)定工作,發(fā)動(dòng)機(jī)實(shí)際轉(zhuǎn)速穩(wěn)定在1500rpm,轉(zhuǎn)矩穩(wěn)定在85N·m,最高燃燒壓力穩(wěn)定在9MPa左右,噴油量穩(wěn)定在21mg/cycle,說(shuō)明A工況點(diǎn)PI控制效果良好。在1.2s時(shí)刻,混合動(dòng)力控制器(HCU)開始從PI控制調(diào)整到基于轉(zhuǎn)矩模型的動(dòng)態(tài)協(xié)調(diào)控制,HCU向ECU發(fā)送的虛擬油門信號(hào)迅速上升,各項(xiàng)參數(shù)隨之上升。在1.2-3.7s內(nèi),APU軸系幾乎勻加速上升,轉(zhuǎn)矩也隨之上升。整個(gè)加速過(guò)程APU工況點(diǎn)基本分布在最佳等效油耗曲線附近,切換過(guò)程表現(xiàn)良好。在3.7s時(shí),HCU切換控制程序到PI控制,系統(tǒng)在B工況點(diǎn)穩(wěn)定運(yùn)行。切換過(guò)程中,APU系統(tǒng)的功率變化量為33.53kW,功率變化率為13.4 kW/s,轉(zhuǎn)速超調(diào)量約為20rpm,轉(zhuǎn)矩超調(diào)量約為20 N·m。

圖5 A到B工況點(diǎn)切換過(guò)程動(dòng)力學(xué)特性
圖6 A到B工況點(diǎn)切換過(guò)程動(dòng)力學(xué)特性
3.4 B點(diǎn)切換到C點(diǎn)
C工況點(diǎn)采用的P、I參數(shù)分別為0.4、0.05,該過(guò)程APU軸系加速轉(zhuǎn)矩、動(dòng)力學(xué)特性分別如圖7、8所示。在0-1.4s期間,APU系統(tǒng)在B工況點(diǎn)穩(wěn)定工作,發(fā)動(dòng)機(jī)實(shí)際轉(zhuǎn)速穩(wěn)定在2420rpm,轉(zhuǎn)矩穩(wěn)定在185N·m,最高燃燒壓力穩(wěn)定在17MPa左右,噴油量穩(wěn)定在40mg/cycle,這說(shuō)明B工況點(diǎn)PI控制效果良好。在1.4s時(shí)刻,系統(tǒng)從B工況點(diǎn)穩(wěn)定運(yùn)行模式轉(zhuǎn)變到動(dòng)態(tài)切換階段,HCU向發(fā)動(dòng)機(jī)ECU發(fā)送的虛擬油門信號(hào)迅速增加,噴油量也隨之增加,發(fā)動(dòng)機(jī)輸出轉(zhuǎn)矩增大,整個(gè)切換過(guò)程APU工況點(diǎn)基本分布在最佳等效油耗曲線附近,切換過(guò)程表現(xiàn)良好。在2.0s時(shí)刻,HCU切換控制程序到PI控制, C工況點(diǎn)各項(xiàng)參數(shù)基本穩(wěn)定。切換過(guò)程中,APU系統(tǒng)的功率變化率為29.77kW/s,轉(zhuǎn)速超調(diào)量約為15rpm,轉(zhuǎn)矩超調(diào)量約為10 N·m。
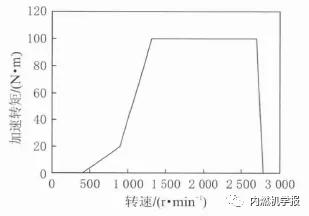
圖7 B到C工況點(diǎn)切換過(guò)程加速轉(zhuǎn)矩
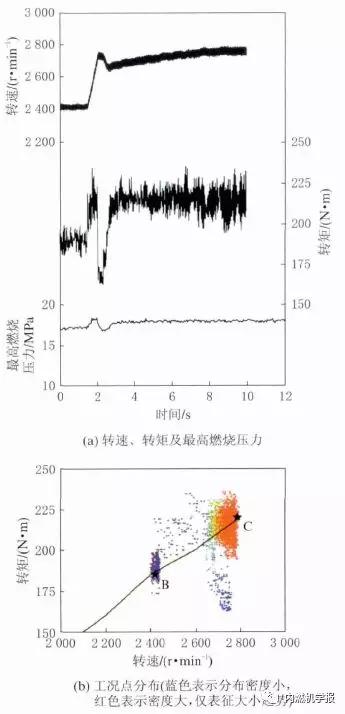
圖8 B到C工況點(diǎn)切換過(guò)程動(dòng)力學(xué)特性
3.5 C切換到B點(diǎn)
C工況點(diǎn)到B工況點(diǎn)的切換屬于減載切換,發(fā)動(dòng)機(jī)轉(zhuǎn)矩小于發(fā)電機(jī)轉(zhuǎn)矩,APU軸系做減速減轉(zhuǎn)矩運(yùn)動(dòng)。該過(guò)程APU軸系減速轉(zhuǎn)矩、動(dòng)力學(xué)特性分別如圖9、10所示。在0-2.5s期間,APU系統(tǒng)在C工況點(diǎn)穩(wěn)定工作,發(fā)動(dòng)機(jī)實(shí)際轉(zhuǎn)速穩(wěn)定在2785rpm,上下波動(dòng)范圍為20rpm,轉(zhuǎn)矩穩(wěn)定約222N·m,波動(dòng)范圍為15N·m,最高燃燒壓力穩(wěn)定在18MPa左右,噴油量穩(wěn)定在42mg/cycle,這說(shuō)明C工況點(diǎn)PI控制效果良好。在2.5s時(shí)刻,HCU向ECU發(fā)送虛擬油門信號(hào)突降,噴油量突然下降到28mg/cycle,APU幾乎勻減速下降,在3.3s進(jìn)入PI控制。2.5~3.3s內(nèi),轉(zhuǎn)矩與轉(zhuǎn)速幾乎同步下降,整個(gè)切換過(guò)程APU工況點(diǎn)基本分布于等效燃油消耗曲線下方,與切換要求基本一致。切換過(guò)程用時(shí)1.5s,功率變化率為-11.9kW/s,轉(zhuǎn)速超調(diào)量約為150rpm,轉(zhuǎn)矩超調(diào)量約為35N·m。
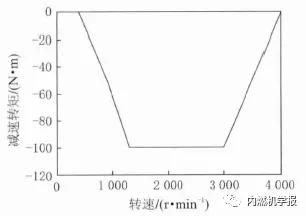
圖9 C到B工況點(diǎn)切換過(guò)程減速轉(zhuǎn)矩

圖10 C到B工況點(diǎn)切換過(guò)程動(dòng)力學(xué)特性
3.6 B切換到A點(diǎn)
B工況點(diǎn)到A工況點(diǎn)的切換過(guò)程的APU軸系減速轉(zhuǎn)矩、動(dòng)力學(xué)特性分別如圖11、12所示。在0-2s期間,APU系統(tǒng)在B工況點(diǎn)穩(wěn)定工作,發(fā)動(dòng)機(jī)實(shí)際轉(zhuǎn)速穩(wěn)定在2420rpm,上下波動(dòng)范圍為±20rpm,轉(zhuǎn)矩穩(wěn)定約185N·m,波動(dòng)范圍為±10N·m,最高燃燒壓力穩(wěn)定在17MPa左右,噴油量穩(wěn)定在40mg/cycle,這說(shuō)明B工況點(diǎn)PI控制效果良好。在第2s,HCU向ECU發(fā)送虛擬油門信號(hào),噴油量突然下降到23 mg/cycle,最高燃燒壓力突降至14.4MPa,整個(gè)切換過(guò)程APU工況點(diǎn)基本分布于等效燃油消耗曲線下方,與切換要求基本一致。切換過(guò)程中,APU系統(tǒng)的切換用時(shí)1s,功率變化率為-33.5kW/s,轉(zhuǎn)速超調(diào)量約為80rpm,轉(zhuǎn)矩超調(diào)量約為10N·m。
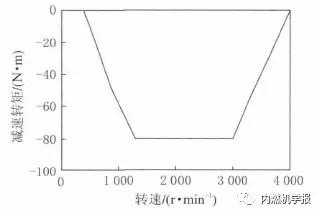
圖11 B到A工況點(diǎn)切換過(guò)程減速轉(zhuǎn)矩

圖12 B到A工況點(diǎn)切換過(guò)程動(dòng)力學(xué)特性
04、結(jié)論
(1)文中提出的基于轉(zhuǎn)矩模型的動(dòng)態(tài)協(xié)調(diào)控制策略能夠保證APU系統(tǒng)在發(fā)動(dòng)機(jī)工況切換時(shí)基本沿著最佳等效燃油消耗線運(yùn)行。
(2)工況點(diǎn)之間切換用時(shí)最低約為0.6s,APU系統(tǒng)的最低功率變化率為29.77kW/s,切換過(guò)程的響應(yīng)較迅速。
(3)整個(gè)過(guò)程中發(fā)動(dòng)機(jī)轉(zhuǎn)速最大超調(diào)量約為150rpm,與最大轉(zhuǎn)速之比為5.4%;轉(zhuǎn)矩最大超調(diào)量約為35N`m,與最大轉(zhuǎn)矩之比為15.7%。整個(gè)過(guò)程中轉(zhuǎn)速和轉(zhuǎn)矩超調(diào)量較低。
文獻(xiàn)來(lái)源及推薦閱讀
[1] 譚丕強(qiáng),黃震宇,胡志遠(yuǎn),樓狄明. 混合動(dòng)力系統(tǒng)發(fā)動(dòng)機(jī)工況切換特性研究[J].內(nèi)燃機(jī)工程,2019,40(4):33-41.
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 50



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
