




 廣告
廣告





















































中汽研 | 純電動汽車續(xù)航里程估計準確度試驗評價方法研究
2020-03-21 14:25:06· 來源:電動學堂

文章來源:《純電動汽車續(xù)航里程估計準確度試驗評價方法研究》引言為減少機動車污染,中國政府大力推廣電動汽車,截至2018 年6 月底,新能源汽車保有量達199 萬
文章來源:《純電動汽車續(xù)航里程估計準確度試驗評價方法研究》
引 言
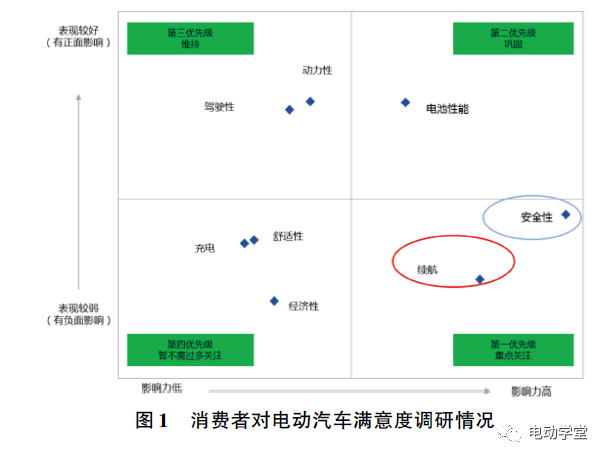
為減少機動車污染,中國政府大力推廣電動汽車,截至2018 年6 月底,新能源汽車保有量達199 萬輛,其中純電動汽車162 萬輛,占新能源汽車總量的81.4%?據(jù)最近消費者調(diào)研顯示,電動汽車的續(xù)航里程是消費者重點關(guān)注但是滿意度較低的指標之一 ,見圖1?調(diào)研中還指出續(xù)航里程顯示準確性成績較差,具有較大的提升空間?
電動汽車的實際使用過程中,儀表顯示剩余續(xù)航里程是另一個非常重要的參數(shù),估計提示可以大大減緩駕駛?cè)说睦锍探箲]?但是對于儀表板顯示的剩余里程是否準確,國內(nèi)外一直沒有統(tǒng)一測評標準,因此需要展開系統(tǒng)的研究,并建立一個客觀可行測評標準對其評估?
1 研究方法
本文將續(xù)航試驗分為常溫續(xù)航(25℃)?高溫續(xù)航(35℃) 和低溫續(xù)航( -7℃) ?在進行相應的續(xù)航試驗之前需要在相應的環(huán)境中浸車12 ~36h,然后循環(huán)進行NEDC 工況的測試?在進行高溫或低溫續(xù)航試驗時,需要開啟空調(diào)?高溫試驗空調(diào)要求在試驗循環(huán)開始時,空調(diào)設(shè)置到內(nèi)循環(huán)吹面模式,溫度及風量根據(jù)車內(nèi)溫度情況靈活設(shè)定,盡快使車內(nèi)測試點的平均溫度盡快達到25℃以下,之后到試驗結(jié)束期間應盡量保持在不高于25℃且不低于23℃的范圍內(nèi);低溫試驗空調(diào)設(shè)定要求在試驗循環(huán)開始時,空調(diào)設(shè)置到外循環(huán)并吹腳的模式,溫度及風量根據(jù)車內(nèi)溫度情況靈活設(shè)定,盡快使車內(nèi)測試點的平均溫度盡快達到20℃ 以上,之后到試驗結(jié)束期間應盡量保持在不高于22℃且不低于20℃的范圍內(nèi)?
1.1 車輛參數(shù)
本次試驗選取了8 款車身長度大于等于4m (常規(guī)車),3 款車身長度小于4m (微型車) 的車輛,車輛參數(shù)如表1所示?

1.2 試驗過程

試驗流程如圖2 所示,在轉(zhuǎn)鼓試驗臺上,持續(xù)進行NEDC 工況的行駛,直至達到試驗截止條件 ?在試驗進行的同時,記錄試驗開始前儀表顯示的剩余里程(第0 個循環(huán)的數(shù)據(jù)點) 和每個完整NEDC 工況結(jié)束時的儀表顯示的剩余里程(以下稱為“ 表顯剩余里程”),即每完成一個NEDC 工況,就記錄一個數(shù)據(jù),直至達到試驗截止條件?試驗完成后根據(jù)實際續(xù)航里程計算每個記錄的表顯剩余里程所對應的實際剩余里程?
1.3 評估方法
目前常用于評估物理數(shù)據(jù)準確度的評估方法有距離評估方法和確定系數(shù)評估方法?其中距離評估方法有歐式距離?曼哈頓距離?切比雪夫雪夫距離等,但是根據(jù)試驗數(shù)據(jù)試算,這些評估方法容易受極值點影響,誤差較大,因此不能很好地反映續(xù)航估計準確度?
為了評估實際剩余里程顯示準確度,需要把它由實際問題轉(zhuǎn)化成數(shù)學模型,把在轉(zhuǎn)鼓上測得的實際剩余里程作為回歸直線,把儀表板顯示的剩余里程作為散點,這樣就把續(xù)航里程估計準確度問題轉(zhuǎn)換為回歸直線對散點的擬合優(yōu)度問題?本文采用統(tǒng)計學中的確定系數(shù)R2 對電動汽車的續(xù)航里程估計準確度進行了評估?
1.4 確定系數(shù)
確定系數(shù),表示一個隨機變量與多個隨機變量關(guān)系的數(shù)字特征,用來反映回歸模式說明因變量變化可靠程度的一個統(tǒng)計指標 ?
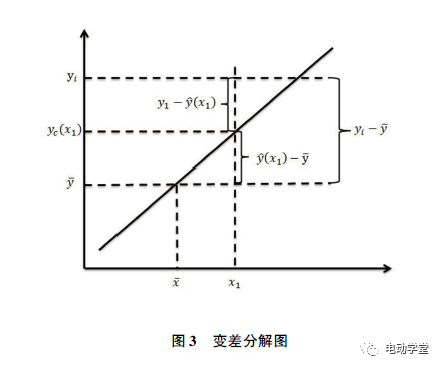
確定系數(shù)的物理意義如圖3 所示,以實際剩余里程為回歸直線用y^i 表示,以表顯剩余里程為觀測值用yi 表示?
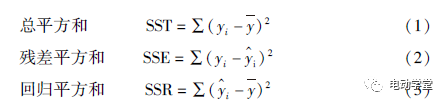
三個平方和的關(guān)系為:總平方和= 回歸平方和+ 殘差平方和 即

經(jīng)推導,確定系數(shù)R2 的計算公式為
式中 R2 ——續(xù)駛里程準確度確定系數(shù);
yi——儀表顯示剩余里程,由進行續(xù)駛里程試驗過程中每個工況循環(huán)結(jié)束時儀表盤顯示為準,無顯示計為“0”,單位為km;
y^i——實際剩余里程,即記錄對應儀表顯示剩余里程(yi ) 時至此車輛完成續(xù)駛里程試驗所行駛的實際里程,單位為km;
y——儀表顯示剩余里程平均值,單位為km?
R2 越接近1,表明回歸平方和占總平方和的比例越大,回歸直線與各個觀測點越接近,回歸直線的擬合程度越好;反之,R2 越接近0,回歸直線的擬合程度就越差?當R2 ≤0 時,認為回歸直線嚴重偏離觀測值,即擬合程度極差?
2 續(xù)航里程估計準確度分析
2.1 續(xù)航里程試驗結(jié)果
2.2 部分車型估計準確度
圖5 為車型7 的續(xù)航試驗數(shù)據(jù),從上面三個圖中可以看出車型7 在各個溫度環(huán)境中表顯續(xù)航里程與實際續(xù)航里程相差不大,其中高溫環(huán)境下表現(xiàn)最好?高溫時R2 最高,低溫時R2 最低?
圖6 為車型10 的續(xù)航試驗結(jié)果,從圖中可以看出車型7在常溫環(huán)境中表顯剩余里程與實際剩余里程相差不大,在低溫環(huán)境中表顯剩余里程與實際剩余里程相差較大?常溫時R2 最高,低溫時R2 最低?
2.3 不同溫度下各車型的確定系數(shù)
圖7 為11 款車型在不同溫度下的R2 值,11 款車型的R2 平均值為0.88,其中有8 款車型的R2 大于0.9,整體表現(xiàn)良好?
11 款車型中的車型11 在高溫中的確定系數(shù)小于0,因此車型11 在高溫環(huán)境中的續(xù)航里程估計準確度最差?圖8為其余10 款車在高溫下的確定系數(shù),十款車型的R2 平均值為0.81,其中只有5 款車型的R2 大于0.9,車輛表現(xiàn)開始出現(xiàn)差距?

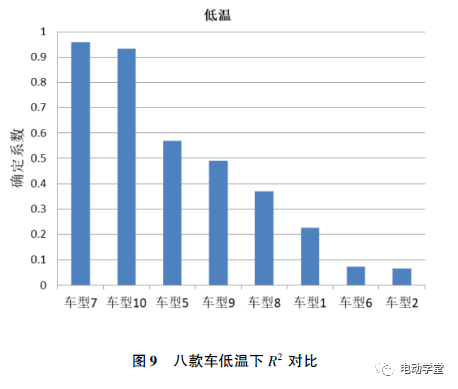
11 款車型中的車型3?車型5?車型9 在低溫環(huán)境中的確定系數(shù)小于0,說明這3 款車型在低溫環(huán)境中的續(xù)航里程估計準確度很差?圖9 為其余8 款車型在低溫環(huán)境中的確定系數(shù),8 款車型的R2 平均值為0.46?其中只有2 款車型的R2 大于0.9,整體表現(xiàn)較差?
2.4 電動汽車續(xù)航里程估計顯示算法的邏輯和策略
根據(jù)研究,目前各電動汽車企業(yè)對電動汽車續(xù)航里程估計顯示算法的邏輯和策略各有不同,總的來說主要包括以下5 種:
1) 對不同的駕駛模式及是否開啟空調(diào)進行能耗賦值,根據(jù)目前的剩余電量?駕駛?cè)诉x擇的駕駛模式及空調(diào)開啟與否進而計算出續(xù)駛里程?
2) 通過最近多次充放電循環(huán)的平均電耗及目前可用的剩余電量計算出續(xù)駛里程?
3) 通過目前的剩余電量與某固定時間內(nèi)的平均電耗的比值來計算續(xù)駛里程?
4) 通過目前的剩余電量與最近多次駕駛距離平均電耗的比值來計算續(xù)駛里程?
5) 通過目前的剩余電量與瞬時驅(qū)動力積分得出的平均驅(qū)動力的比值計算續(xù)駛里程?
可以看出,不管何種續(xù)駛里程估計和顯示的算法,策略都把車輛行駛過程中產(chǎn)生的某一要素或者多種要素考慮進去進行計算剩余續(xù)駛里程?只是選擇的因素不同而已,表明這種帶自學習功能的續(xù)航里程算法越來越被廠家和消費者接受?因此,我們在計算續(xù)航里程估計準確度時也應該考慮并分析其對準確度的影響?
2.5 自學習對確定系數(shù)的影響
部分企業(yè)為了提高續(xù)航里程估計準確度,在策略中加入了自學習功能,能夠根據(jù)歷史能耗修正目前的剩余里程,以便提高表顯剩余里程的精度?為了研究自學習功能對續(xù)航里程估計準確度的影響,本文對比計算了去掉前兩個循環(huán)的數(shù)據(jù),從第三個循環(huán)后開始采集數(shù)據(jù)?等效的效果是給車輛預留約22km (一個NEDC 循環(huán)約11km) 的自學習距離?
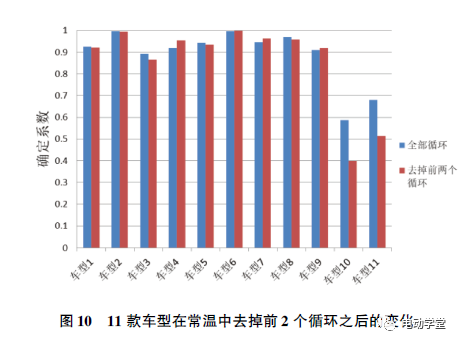
圖10 為是11 款車型在常溫環(huán)境中去掉前兩個循環(huán)之后與全部循環(huán)的R2 之比?從上圖可以看出,在常溫環(huán)境中去掉前兩個循環(huán)之后R2 有變大也有變小,平均下降了5%,其中車型10 和車型11 的準確度變化幅度較大,R2 都下降了24%以上?
圖11 為10 款車型在高溫環(huán)境中去掉前2 個循環(huán)之后與全部循環(huán)的R2 之比?其中11 款車型中的車型11 的R2 小于0?10 款車的R2 平均下降了3.9%,其中車型1 和車型3 變化幅度較大,準確度下降了15% 以上,其他車型變化幅度均在4%以內(nèi)?
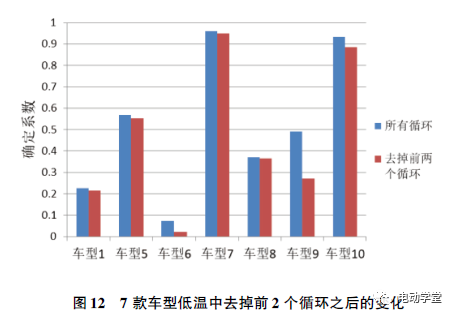
圖12 為在低溫環(huán)境中去掉前2 個循環(huán)與全部循環(huán)的R2之比?11 款車型中的車型2?車型3?車型4 和車型11 的R2 小于0?從上圖中可以看出7 個車型的確定系數(shù)平均下降了18.7%,車型6 和車型9 變化幅度較大,R2 降低了40%以上,其他車型的變化幅度都在6%以內(nèi)?
由以上數(shù)據(jù)可知,去掉前2 個循環(huán)之后對R2 影響很小,并不改變其總體的結(jié)果范圍,因此車輛是否具備自學習功能對結(jié)果影響較小?
2.6 末端里程的估計準確度
當電量較低時,電動汽車駕駛?cè)说睦锍探箲]尤為突出,本文進一步研究了低電量時的續(xù)航里程準確度?
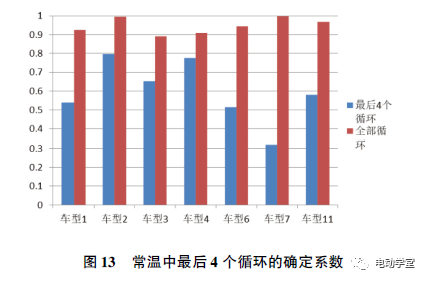
圖13 為7 款車型在常溫中最后4 個循環(huán)的上圖為常溫環(huán)境中最后四個循環(huán)的確定系數(shù)R2 ,11 款車型的車型5?車型8?車型9 和車型10 的末端里程R2 小于0?由上圖可知7 個車型的確定系數(shù)平均下降了36.7%?其中車型2 的確定系數(shù)下降最小,下降了20%,車型7 的確定系數(shù)下降最大,下降了67.9%?
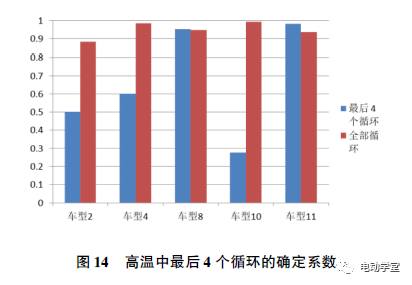
圖14 為5 款車型在高溫環(huán)境中的末端里程R2 ,其他車型的末端里程R2 都小于0?由上圖可知5 個車型的R2 平均下降了29.7%,其中車型10 變化最大,R2 下降了72.0%,車型8 變化最小,R2 增大了0.37%?
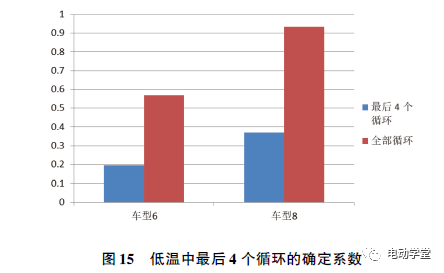
圖15 為2 款車型在低溫環(huán)境中的末端里程R2 ,其它車型的末端里程R2 都小于0?2 個車型的R2 平均下降了62.9%?
由以上數(shù)據(jù)可知,電動汽車末端里程的R2 相比全部循環(huán)的R2 低,而且低溫環(huán)境中的R2 下降更多?在低電量狀態(tài)下,車輛普遍不能提供準確的里程估計,會加重電動汽車駕駛?cè)说睦锍探箲]程度?
3 結(jié)論
電動汽車在不同環(huán)境溫度的續(xù)航里程估計準確度并不相同,常溫最好,高溫次之,低溫最差?在常溫中有9 款車型的確定系數(shù)達到了0.9,在高溫中只有5 款車型的確定系數(shù)達到了0.9,在低溫中只有2 款車型的確定系數(shù)達到了0.9?
本文給車輛預留自學習的距離后再計算其續(xù)駛里程估計準確度,可以發(fā)現(xiàn)續(xù)航里程估計算法中自學習功能對估計準確度的總體結(jié)果影響很小,因此在對續(xù)航里程估計準確度進行評價時可以直接采集全部數(shù)據(jù)點?
末端里程估計R2 比相對于全部循環(huán)的R2 下降幅度較大,甚至部分車型的R2 變?yōu)樾∮?,這同時也說明車企對于末端里程估計準確度有很大的提升空間?



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
