




 廣告
廣告





















































首頁(yè) > 汽車(chē)技術(shù) > 正文
混合動(dòng)力車(chē)輛機(jī)電復(fù)合驅(qū)動(dòng)技術(shù)
2020-04-29 23:30:32· 來(lái)源:EDC電驅(qū)未來(lái)

1 混合動(dòng)力車(chē)輛的分類(lèi)混合動(dòng)力車(chē)輛有多種分類(lèi)方法,如按連接部件的位置分類(lèi)、按混合比的大小分類(lèi)及按驅(qū)動(dòng)系統(tǒng)的復(fù)雜程度分類(lèi).根據(jù)動(dòng)力傳遞路線,可以將混合動(dòng)力
1 混合動(dòng)力車(chē)輛的分類(lèi)
混合動(dòng)力車(chē)輛有多種分類(lèi)方法,如按連接部件的位置分類(lèi)、按混合比的大小分類(lèi)及按驅(qū)動(dòng)系統(tǒng)的復(fù)雜程度分類(lèi).根據(jù)動(dòng)力傳遞路線,可以將混合動(dòng)力汽車(chē)劃分為:串聯(lián)式、并聯(lián)式、混聯(lián)式和復(fù)合式4種類(lèi)型.
(1)串聯(lián)式混合動(dòng)力車(chē)輛
串聯(lián)式混合動(dòng)力車(chē)輛的發(fā)動(dòng)機(jī)帶動(dòng)發(fā)電機(jī)發(fā)電.發(fā)電機(jī)發(fā)出的電能供給驅(qū)動(dòng)電動(dòng)機(jī)或存儲(chǔ)于動(dòng)力電池中,如圖1所示.該驅(qū)動(dòng)系統(tǒng)結(jié)構(gòu)布置自由度大,控制難度小,但傳動(dòng)效率較低.
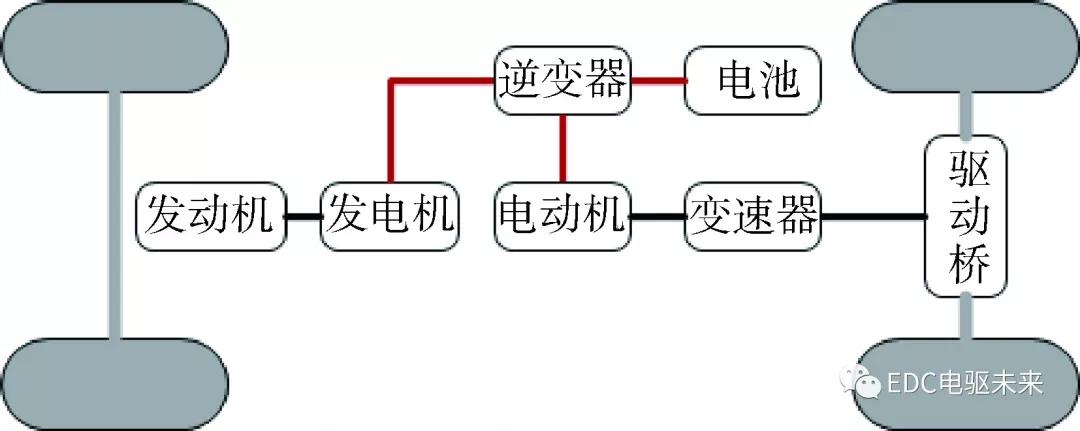
圖1 串聯(lián)式混合動(dòng)力車(chē)輛
(2)并聯(lián)式混合動(dòng)力車(chē)輛
并聯(lián)式混合動(dòng)力車(chē)輛的發(fā)動(dòng)機(jī)和電動(dòng)機(jī)通過(guò)動(dòng)力耦合裝置與傳動(dòng)軸連接,車(chē)輛既可以由發(fā)動(dòng)機(jī)經(jīng)傳動(dòng)系統(tǒng)機(jī)械驅(qū)動(dòng),又可以由驅(qū)動(dòng)電機(jī)經(jīng)傳動(dòng)系統(tǒng)驅(qū)動(dòng),如圖2所示.該驅(qū)動(dòng)系統(tǒng)傳動(dòng)效率較高,但結(jié)構(gòu)復(fù)雜,布置受到一定限制.
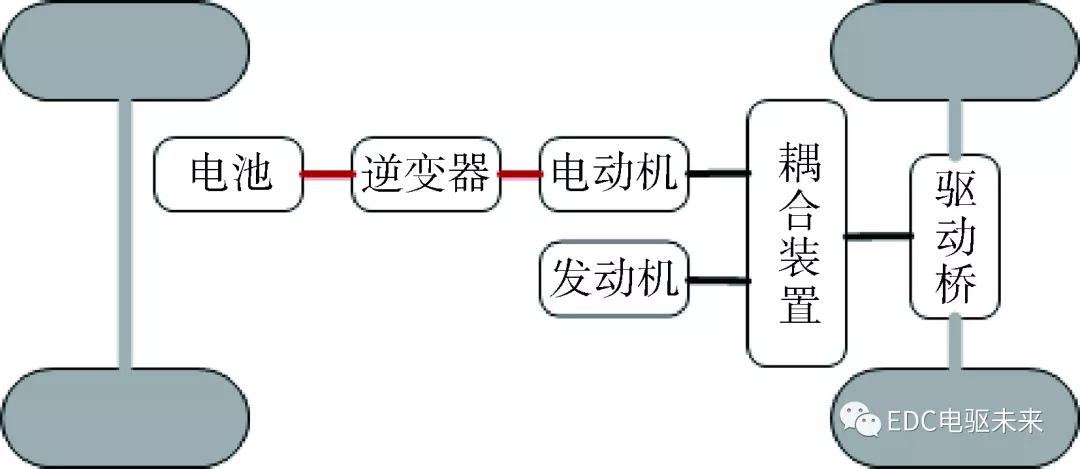
圖2 并聯(lián)式混合動(dòng)力車(chē)輛
(3)混聯(lián)式混合動(dòng)力車(chē)輛
混聯(lián)式混合動(dòng)力車(chē)輛是在并聯(lián)式混合動(dòng)力車(chē)輛的基礎(chǔ)上,增加了由發(fā)動(dòng)機(jī)經(jīng)發(fā)電機(jī)發(fā)電給電機(jī),再由電機(jī)驅(qū)動(dòng)車(chē)輛的傳遞路線,是串聯(lián)式與并聯(lián)式的結(jié)合,如圖3所示.該驅(qū)動(dòng)系統(tǒng)的其工作模式更多,結(jié)構(gòu)和控制最復(fù)雜,要求布置更緊湊.
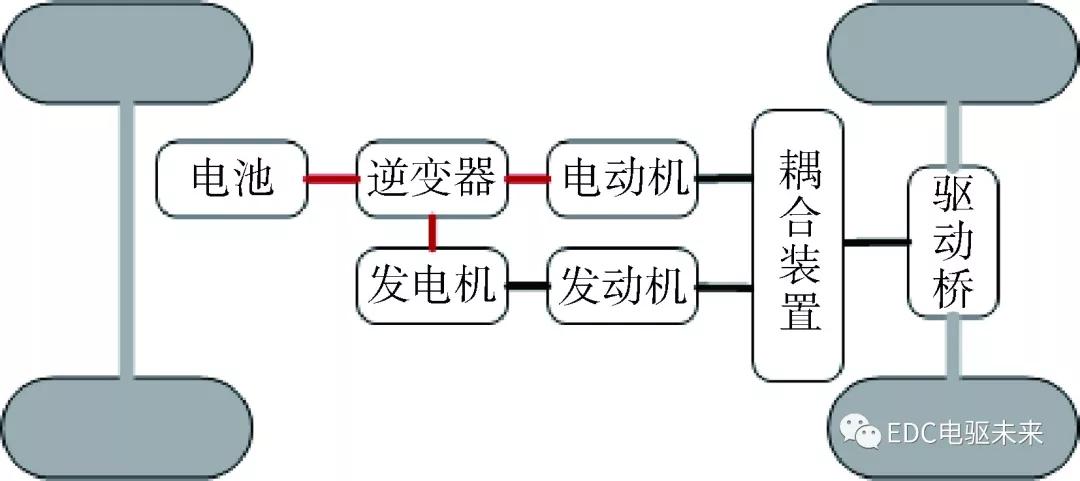
圖3 混聯(lián)式混合動(dòng)力車(chē)輛
(4)復(fù)合式混合動(dòng)力車(chē)輛
復(fù)合式混合動(dòng)力車(chē)輛的前(后)軸由發(fā)動(dòng)機(jī)單獨(dú)驅(qū)動(dòng),后(前)軸由驅(qū)動(dòng)電機(jī)單獨(dú)驅(qū)動(dòng),兩種動(dòng)力系統(tǒng)不需要特定的動(dòng)力耦合裝置,而是通過(guò)路面實(shí)現(xiàn)動(dòng)力耦合,所以該構(gòu)型也被稱(chēng)為T(mén)TR HEV(through-the-road hybrid electric vehicle).驅(qū)動(dòng)構(gòu)型如圖4所示.該驅(qū)動(dòng)系統(tǒng)可由傳統(tǒng)汽車(chē)底盤(pán)改裝而來(lái),制造成本較低,結(jié)構(gòu)簡(jiǎn)單,布置方便.
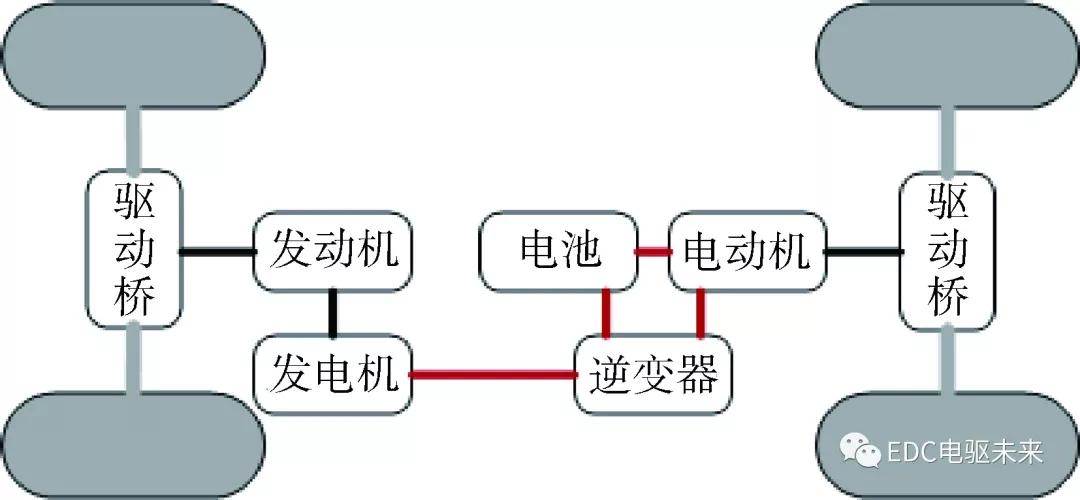
圖4 復(fù)合式混合動(dòng)力車(chē)輛
機(jī)電復(fù)合驅(qū)動(dòng)的發(fā)動(dòng)機(jī)和電機(jī)分別向不同的驅(qū)動(dòng)橋提供驅(qū)動(dòng)力,是常規(guī)驅(qū)動(dòng)技術(shù)與混合動(dòng)力技術(shù)相結(jié)合的產(chǎn)物,兼具常規(guī)車(chē)輛的動(dòng)力性、通過(guò)性、操縱性和混合動(dòng)力車(chē)輛的經(jīng)濟(jì)性.
2 機(jī)電復(fù)合驅(qū)動(dòng)技術(shù)研究現(xiàn)狀
目前,國(guó)內(nèi)外科研機(jī)構(gòu)已經(jīng)研發(fā)出機(jī)電復(fù)合驅(qū)動(dòng)混合動(dòng)力原型車(chē).20世紀(jì)90年代末,法國(guó)雷諾汽車(chē)公司推出“Next”插電式機(jī)電復(fù)合驅(qū)動(dòng)混合動(dòng)力汽車(chē);馬來(lái)西亞理工大學(xué)的團(tuán)隊(duì)將傳統(tǒng)汽車(chē)改裝為帶輪轂電機(jī)的機(jī)電復(fù)合驅(qū)動(dòng)汽車(chē);北京理工大學(xué)對(duì)8×8型多軸輪式機(jī)電復(fù)合驅(qū)動(dòng)車(chē)輛展開(kāi)了研究,該車(chē)的柴油發(fā)動(dòng)機(jī)額定功率為330 kW,在極限機(jī)動(dòng)的工況下,動(dòng)力電池可以5C放電率提供300 kW的功率,其驅(qū)動(dòng)系統(tǒng)如圖5所示;湖南大學(xué)與長(zhǎng)豐集團(tuán)聯(lián)合研制了CFA6470HEV機(jī)電復(fù)合驅(qū)動(dòng)越野車(chē);合肥工業(yè)大學(xué)的團(tuán)隊(duì)著重研究了插電式機(jī)電復(fù)合驅(qū)動(dòng)轎車(chē).針對(duì)機(jī)電復(fù)合驅(qū)動(dòng)混合動(dòng)力技術(shù)的主要研究方向有能量分配控制、模式切換過(guò)程的協(xié)調(diào)控制和牽引力控制等.

圖5 8×8機(jī)電復(fù)合驅(qū)動(dòng)系統(tǒng)示意圖
2.1 能量分配控制技術(shù)
2.1.1 國(guó)外研究現(xiàn)狀
馬來(lái)西亞的S. A. Zulkifli等以加速踏板位置、車(chē)速和發(fā)動(dòng)機(jī)效率為門(mén)限,設(shè)計(jì)了邏輯門(mén)限能量分配控制策略.伊朗的N. Fallahi等對(duì)比了邏輯門(mén)限控制策略和模糊邏輯控制策略,發(fā)現(xiàn)車(chē)輛在模糊邏輯控制策略下有更好的燃油經(jīng)濟(jì)性和排放性能,同時(shí)動(dòng)力電池SOC能維持在理想范圍內(nèi);H. Moghbeli等提出了采用雙模糊控制器的能量管理策略,其中一個(gè)控制器以(SOC-SOC_min)/(SOC_max-SOC_min)為輸入,另一個(gè)控制器以SOC和其導(dǎo)數(shù)為輸入,可有效避免電池SOC的急劇下降.美國(guó)的J. B. Holtz 等提出了基于路面載荷的功率分配方法:緩慢變化的負(fù)載由發(fā)動(dòng)機(jī)提供,急速變化的負(fù)載由電機(jī)提供;意大利的C. Pisanti等采用以SOC為狀態(tài)變量,功率分配系數(shù)為控制量,最小燃油消耗為代價(jià)函數(shù)的動(dòng)態(tài)規(guī)劃方法優(yōu)化了整車(chē)能量分配策略.

2.1.2 國(guó)內(nèi)研究現(xiàn)狀
上海交通大學(xué)的馬東兵等設(shè)計(jì)了邏輯門(mén)限能量管理策略,保證發(fā)動(dòng)機(jī)工作在高效區(qū)域.但靜態(tài)邏輯門(mén)限控制策略無(wú)法保證車(chē)輛燃油經(jīng)濟(jì)性最優(yōu).張軍提出一種可變邏輯門(mén)限控制策略,以發(fā)動(dòng)機(jī)和驅(qū)動(dòng)電機(jī)的輸出特性、電池的SOC為主要依據(jù)計(jì)算動(dòng)態(tài)功率門(mén)限值.華南理工大學(xué)的黃向東提出一種工作模式規(guī)則控制和優(yōu)化控制相結(jié)合的復(fù)合型控制策略,對(duì)主要的工作模式采用基于系統(tǒng)效率最優(yōu)的瞬時(shí)優(yōu)化方法求解.浙江大學(xué)的江冬冬建立機(jī)電復(fù)合驅(qū)動(dòng)車(chē)輛效率分析模型,對(duì)比傳統(tǒng)規(guī)則策略與動(dòng)態(tài)規(guī)劃控制策略的仿真結(jié)果,獲得新規(guī)則控制策略;并采用學(xué)習(xí)向量量化神經(jīng)網(wǎng)絡(luò)識(shí)別實(shí)際運(yùn)行工況,提高新規(guī)則控制策略在不同工況下的適應(yīng)性.湖南大學(xué)的余群明采用模糊邏輯方法設(shè)計(jì)能量分配控制策略,根據(jù)需求轉(zhuǎn)矩、電池電量、電機(jī)轉(zhuǎn)速、傳東系速比和車(chē)速?zèng)Q定發(fā)動(dòng)機(jī)扭矩、驅(qū)動(dòng)電機(jī)扭矩、啟動(dòng)電機(jī)扭矩大??;黃偉博士將優(yōu)化計(jì)算方法得到的功率分配結(jié)果作為制定模糊控制規(guī)則的指導(dǎo)依據(jù),提出了基于瞬時(shí)優(yōu)化的模糊邏輯控制策略.廣州汽車(chē)集團(tuán)的夏珩等基于發(fā)動(dòng)機(jī)效率、ISG 電機(jī)效率、后軸驅(qū)動(dòng)電機(jī)效率,以系統(tǒng)總效率最優(yōu)為目標(biāo)函數(shù)實(shí)現(xiàn)多動(dòng)力源的功率分配.
2.1.3 研究現(xiàn)狀分析
針對(duì)機(jī)電復(fù)合驅(qū)動(dòng)車(chē)輛的能量分配控制策略的研究,主要方法有兩種:(1)基于規(guī)則的邏輯門(mén)限控制策略及其優(yōu)化,包括適應(yīng)動(dòng)態(tài)工況的可變邏輯門(mén)限控制策略、基于規(guī)則與效率最優(yōu)控制策略相結(jié)合和基于規(guī)則與動(dòng)態(tài)規(guī)劃控制策略相結(jié)合,優(yōu)化后的控制策略對(duì)動(dòng)態(tài)工況有一定的適應(yīng)性;(2)模糊邏輯控制策略及其優(yōu)化,對(duì)模糊邏輯控制策略進(jìn)行了深入研究、并將其與瞬時(shí)優(yōu)化控制策略相結(jié)合進(jìn)行優(yōu)化.此外對(duì)智能控制算法,如神經(jīng)網(wǎng)絡(luò)算法,也進(jìn)行了初步研究.在理論研究上國(guó)內(nèi)與國(guó)外并無(wú)明顯差距.
2.2 模式切換協(xié)調(diào)控制技術(shù)
2.2.1 國(guó)外研究現(xiàn)狀
機(jī)電復(fù)合驅(qū)動(dòng)混合動(dòng)力車(chē)輛的模式切換動(dòng)態(tài)協(xié)調(diào)控制與并聯(lián)式混合動(dòng)力車(chē)輛的控制內(nèi)容和原理相似,針對(duì)這方面的研究,Roy等設(shè)計(jì)了發(fā)動(dòng)機(jī)轉(zhuǎn)矩觀測(cè)器,實(shí)時(shí)計(jì)算發(fā)動(dòng)機(jī)的動(dòng)態(tài)轉(zhuǎn)矩,通過(guò)電動(dòng)機(jī)輸出相應(yīng)的補(bǔ)償轉(zhuǎn)矩來(lái)抵消發(fā)動(dòng)機(jī)的轉(zhuǎn)矩遲滯;Korowais等將工作模式劃分為不同的子域,并設(shè)計(jì)了相應(yīng)的狀態(tài)控制器,分析了混雜系統(tǒng)下的模式切換協(xié)調(diào)控制問(wèn)題.V. T. Minh和A. Rashid等采用模型預(yù)測(cè)的控制方法,以離合器完全接合后的速度和轉(zhuǎn)矩值為目標(biāo)值,控制離合器接合過(guò)程,使輸出速度和轉(zhuǎn)矩逐步轉(zhuǎn)變?yōu)槟繕?biāo)值;R. Beck等重點(diǎn)關(guān)注了離合器接合過(guò)程及系統(tǒng)平順性問(wèn)題,將離合器轉(zhuǎn)矩作為已知擾動(dòng)量,設(shè)計(jì)了模型預(yù)測(cè)控制器處理切換過(guò)程;Kim等考慮發(fā)動(dòng)機(jī)轉(zhuǎn)矩誤差干擾和離合器轉(zhuǎn)矩干擾,設(shè)計(jì)了含擾動(dòng)項(xiàng)的觀測(cè)器,采用電機(jī)轉(zhuǎn)矩補(bǔ)償,從而降低模式切換沖擊.
2.2.2 國(guó)內(nèi)研究現(xiàn)狀
清華大學(xué)的童毅等分析了動(dòng)態(tài)協(xié)調(diào)控制問(wèn)題的產(chǎn)生原因及研究的必要性,提出“發(fā)動(dòng)機(jī)轉(zhuǎn)矩開(kāi)環(huán)+發(fā)動(dòng)機(jī)動(dòng)態(tài)轉(zhuǎn)矩估計(jì)+電動(dòng)機(jī)轉(zhuǎn)矩補(bǔ)償”的控制算法;湖南大學(xué)的黃偉提出了動(dòng)態(tài)協(xié)調(diào)控制品質(zhì)的評(píng)價(jià)指標(biāo),總結(jié)出模式切換時(shí)傳動(dòng)系統(tǒng)的工作過(guò)程和控制要點(diǎn);張軍等提出一種新的電機(jī)轉(zhuǎn)矩算法來(lái)實(shí)現(xiàn)純電動(dòng)模式與發(fā)動(dòng)機(jī)工作模式的平順切換,算法根據(jù)發(fā)動(dòng)機(jī)輸出轉(zhuǎn)矩計(jì)算出電機(jī)等效輸出轉(zhuǎn)矩;同濟(jì)大學(xué)的趙治國(guó)等研究了從純電動(dòng)驅(qū)動(dòng)模式到混合驅(qū)動(dòng)模式的切換過(guò)程,以混雜系統(tǒng)切換為理論依據(jù),設(shè)計(jì)出無(wú)擾動(dòng)模式切換控制策略.合肥工業(yè)大學(xué)的錢(qián)立軍等提出一種“發(fā)動(dòng)機(jī)調(diào)速+離合器模糊PID控制+發(fā)動(dòng)機(jī)動(dòng)態(tài)轉(zhuǎn)矩查表+雙電機(jī)轉(zhuǎn)矩補(bǔ)償控制”轉(zhuǎn)矩協(xié)調(diào)控制方法;北京交通大學(xué)的趙敏敏全面研究了動(dòng)態(tài)協(xié)調(diào)控制策略,包括離合器動(dòng)態(tài)控制的同步調(diào)速、快速結(jié)合及逐步加載;變速箱動(dòng)態(tài)過(guò)程的卸載摘擋、同步調(diào)速和加載掛檔等.
2.2.3 研究現(xiàn)狀分析
針對(duì)機(jī)電復(fù)合驅(qū)動(dòng)車(chē)輛的模式切換協(xié)調(diào)控制策略的研究,一些學(xué)者分析了動(dòng)態(tài)協(xié)調(diào)控制品質(zhì)的評(píng)價(jià)指標(biāo),采用了發(fā)動(dòng)機(jī)轉(zhuǎn)矩查表、估計(jì)和電機(jī)轉(zhuǎn)矩補(bǔ)償?shù)目刂品椒?大都單獨(dú)研究了純電動(dòng)模式與混合驅(qū)動(dòng)模式或純電動(dòng)模式與純發(fā)動(dòng)機(jī)模式間的切換.國(guó)外還采用模型預(yù)測(cè)的方法對(duì)離合器的接合過(guò)程進(jìn)行控制,而國(guó)內(nèi)很少有文獻(xiàn)考慮離合器的接合過(guò)程.
2.3 穩(wěn)定性控制技術(shù)
2.3.1 國(guó)外研究現(xiàn)狀
日立汽車(chē)公司根據(jù)發(fā)動(dòng)機(jī)及驅(qū)動(dòng)電機(jī)轉(zhuǎn)矩狀態(tài),分析計(jì)算出驅(qū)動(dòng)輪與路面間的利用附著系數(shù),得到目標(biāo)驅(qū)動(dòng)和制動(dòng)轉(zhuǎn)矩,然后協(xié)調(diào)發(fā)動(dòng)機(jī)、電機(jī)及制動(dòng)器的控制器,實(shí)現(xiàn)驅(qū)動(dòng)防滑控制;德國(guó) E. Galvagno 等通過(guò)時(shí)域和頻域響應(yīng)分析研究了機(jī)電復(fù)合驅(qū)動(dòng)汽車(chē)的駕駛性能和傳動(dòng)系統(tǒng)的動(dòng)力傳遞特性,提出能平衡模型復(fù)雜度和控制效果的有效模型,描述了前后軸轉(zhuǎn)矩分配對(duì)車(chē)輛駕駛性能的影響;美國(guó)的Amanda Hyde等通過(guò)分析傳動(dòng)系統(tǒng)的動(dòng)態(tài)特性和輪胎的摩擦特性,提出可以通過(guò)合理地選擇工作模式使車(chē)輛在低附著路面下實(shí)現(xiàn)車(chē)輪防滑驅(qū)動(dòng)控制;伊朗的P. Naderi以橫擺角速度偏差和橫擺角速度變化率為參考值,采用模糊邏輯方法計(jì)算兩后輪的驅(qū)動(dòng)轉(zhuǎn)矩差,從而得到輪轂電機(jī)的輸出目標(biāo)轉(zhuǎn)矩;美國(guó)的R. Osborn等引入前后軸轉(zhuǎn)矩分配系數(shù)和左右車(chē)輪轉(zhuǎn)矩分配系數(shù),與橫擺角速度、側(cè)向加速度一起作為變量,計(jì)算各車(chē)輪需求轉(zhuǎn)矩;Ossama Mokhiamar 等提出以輪胎側(cè)向力及縱向力最優(yōu)分布為目標(biāo),通過(guò)優(yōu)化加權(quán)系數(shù)來(lái)改善整車(chē)操控性與穩(wěn)定性.
2.3.2 國(guó)內(nèi)研究現(xiàn)狀
上海交通大學(xué)的朱建新提出了在四驅(qū)模式下根據(jù)前后軸轉(zhuǎn)速差確定轉(zhuǎn)矩分配比的方法;華南理工大學(xué)的黃向東通過(guò)對(duì)比當(dāng)前路面與標(biāo)準(zhǔn)道路的滑轉(zhuǎn)率和縱向附著系數(shù)曲線,采用模糊邏輯控制方法,估計(jì)當(dāng)前路面下的最優(yōu)滑轉(zhuǎn)率,以此調(diào)節(jié)電機(jī)輸出扭矩的大??;同濟(jì)大學(xué)的趙治國(guó)綜合比例、模糊和比例積分控制的優(yōu)點(diǎn),開(kāi)發(fā)了P-Fuzzy-PI多模態(tài)分段驅(qū)動(dòng)防滑控制算法;重慶大學(xué)的謝鳴根據(jù)驅(qū)動(dòng)輪角加速度、驅(qū)動(dòng)轉(zhuǎn)矩及滑轉(zhuǎn)率之間的關(guān)系確定最佳角加速度α,并以此作為控制目標(biāo),制定加速踏板開(kāi)度修正控制策略、前后驅(qū)動(dòng)軸轉(zhuǎn)矩分配控制策略及前、后限滑差速轉(zhuǎn)矩控制策略;徐凌凡等依據(jù)兩側(cè)力矩大小相同方向相反的原則,通過(guò)動(dòng)態(tài)比例調(diào)節(jié)前后軸的力矩分配,基于仿真分析了不同比例系數(shù)下的控制效果;吉林大學(xué)的陳國(guó)迎在整車(chē)控制分配器的設(shè)計(jì)中,考慮了各等式約束與不等式約束,并引入加權(quán)輪胎利用率平方和最小為優(yōu)化目標(biāo);北京理工大學(xué)的許明銳以實(shí)際橫擺角速度及質(zhì)心側(cè)偏角與理想值間的偏差作為輸入,建立了基于 PID 控制的橫擺力矩決策模塊,以輪胎附著利用率最優(yōu)為優(yōu)化目標(biāo),建立了目標(biāo)橫擺力矩到各車(chē)輪縱向力的分配方法.
2.3.3 研究現(xiàn)狀分析
國(guó)外從控制方法、動(dòng)力傳遞特性、模型等方面對(duì)此機(jī)電復(fù)合驅(qū)動(dòng)車(chē)輛穩(wěn)定性控制技術(shù)進(jìn)行研究,理論基礎(chǔ)相對(duì)完善.國(guó)內(nèi)在這方面的研究較少,與國(guó)外差距較大.
3 機(jī)電復(fù)合驅(qū)動(dòng)關(guān)鍵技術(shù)
從機(jī)電復(fù)合驅(qū)動(dòng)技術(shù)的研究現(xiàn)狀來(lái)看,整車(chē)能量控制技術(shù)和車(chē)輛穩(wěn)定性控制技術(shù)是目前的研究熱點(diǎn),也是機(jī)電復(fù)合驅(qū)動(dòng)車(chē)輛發(fā)展的關(guān)鍵技術(shù).此外,驅(qū)動(dòng)電機(jī)是作為車(chē)輛的重要?jiǎng)恿Σ考?,也是值得重視的研究點(diǎn).
3.1 整車(chē)能量控制技術(shù)
整車(chē)能量控制策略包括能量分配控制策略和模式切換過(guò)程中的協(xié)調(diào)控制策略.能量分配控制策略的目標(biāo)就是在保證動(dòng)力性的基礎(chǔ)上,使發(fā)動(dòng)機(jī)、發(fā)電機(jī)等部件盡可能工作在高效區(qū)域.同時(shí),機(jī)電復(fù)合驅(qū)動(dòng)車(chē)輛不同工作模式間的切換常伴隨不同動(dòng)力源輸出轉(zhuǎn)矩和轉(zhuǎn)速的大幅變化,發(fā)動(dòng)機(jī)響應(yīng)速度較慢,會(huì)導(dǎo)致一段時(shí)間內(nèi)動(dòng)力不足.切換過(guò)程中離合器接合過(guò)快會(huì)造成車(chē)輛沖擊,接合過(guò)慢會(huì)造成離合器磨損、動(dòng)力中斷或不足.模式切換過(guò)程中協(xié)調(diào)控制策略的好壞決定了整車(chē)動(dòng)力性和乘員舒適性的優(yōu)劣.
目前,能量分配控制策略主要采用了邏輯門(mén)限控制策略與模糊邏輯控制策略.單一的控制策略都有其局限性,如邏輯門(mén)限控制策略的門(mén)限值不能隨工況動(dòng)態(tài)變化,控制效果較差;全局優(yōu)化控制策略必須已知循環(huán)工況,計(jì)算復(fù)雜,不適合實(shí)時(shí)控制.如果將兩種或多種控制策略相結(jié)合,會(huì)有較好的控制效果.目前已有多位學(xué)者采用這種方法對(duì)控制策略進(jìn)行了優(yōu)化,取得不錯(cuò)的效果,能量分配控制策略的組合化是能量分配控制的發(fā)展趨勢(shì)之一.同時(shí),隨著智能算法的不斷發(fā)展,基于人工智能的能量管理策略將有光明的前景,智能控制能很好地處理非線性問(wèn)題,其強(qiáng)大的自學(xué)習(xí)能力可以適應(yīng)車(chē)輛不斷變化的行駛工況,控制更加精確,能量分配控制策略的智能化也是未來(lái)研究的主要方向.
目前,動(dòng)態(tài)協(xié)調(diào)控制中的發(fā)動(dòng)機(jī)轉(zhuǎn)矩大都由轉(zhuǎn)矩查表估計(jì)得到,精度和動(dòng)態(tài)適應(yīng)性差.為了使電機(jī)補(bǔ)償轉(zhuǎn)矩更加準(zhǔn)確,必須精確測(cè)得發(fā)動(dòng)機(jī)瞬時(shí)轉(zhuǎn)矩,并合理控制離合器的接合,從而控制離合器的傳遞轉(zhuǎn)矩,得到發(fā)動(dòng)機(jī)傳遞給車(chē)輪的實(shí)際驅(qū)動(dòng)轉(zhuǎn)矩.發(fā)動(dòng)機(jī)轉(zhuǎn)矩識(shí)別和離合器的精確化控制是協(xié)調(diào)控制的研究重點(diǎn).
3.2 車(chē)輛穩(wěn)定性控制技術(shù)
車(chē)輛穩(wěn)定性控制技術(shù)包括車(chē)輛防滑控制和橫擺力矩控制.車(chē)輛在濕滑、冰雪路面上行駛,經(jīng)常會(huì)出現(xiàn)輪胎滑轉(zhuǎn)的現(xiàn)象.一方面會(huì)加快輪胎的磨損,另一方面會(huì)降低輪胎的側(cè)向附著力,導(dǎo)致車(chē)輛側(cè)滑、甩尾,甚至造成事故.車(chē)輛轉(zhuǎn)彎時(shí),若不滿足目標(biāo)橫擺力矩會(huì)導(dǎo)致過(guò)多或不足轉(zhuǎn)向,不能按照駕駛員意圖完成轉(zhuǎn)向,過(guò)多轉(zhuǎn)向甚至?xí)斐绍?chē)輛失控.機(jī)電復(fù)合驅(qū)動(dòng)車(chē)輛軸間獨(dú)立驅(qū)動(dòng)的特性可合理控制各軸或各輪驅(qū)動(dòng)力、制動(dòng)力,防止車(chē)輪滑轉(zhuǎn),提高車(chē)輛轉(zhuǎn)向過(guò)程的穩(wěn)定性、安全性.
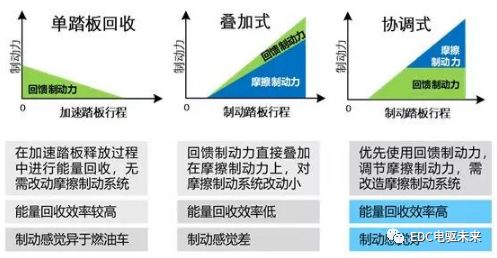
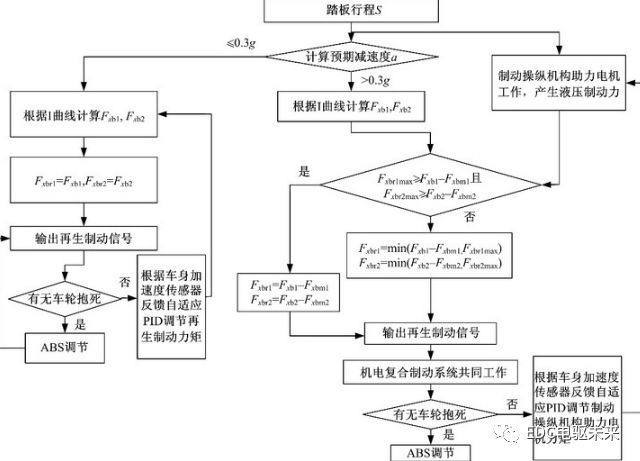
對(duì)于機(jī)電復(fù)合驅(qū)動(dòng)混合動(dòng)力車(chē)輛,考慮到驅(qū)動(dòng)電機(jī)轉(zhuǎn)矩響應(yīng)速度快、控制精確,且制動(dòng)/驅(qū)動(dòng)切換容易,可不再利用防抱死制動(dòng)系統(tǒng)來(lái)實(shí)施驅(qū)動(dòng)防滑功能.車(chē)輪打滑或車(chē)輛不穩(wěn)定時(shí)將優(yōu)先利用驅(qū)動(dòng)電機(jī)進(jìn)行驅(qū)動(dòng)力控制,發(fā)動(dòng)機(jī)轉(zhuǎn)矩調(diào)節(jié)響應(yīng)速度較慢,可用來(lái)輔助驅(qū)動(dòng)力控制,必要時(shí)再利用傳統(tǒng)制動(dòng)機(jī)構(gòu).目前的研究方法主要是調(diào)節(jié)驅(qū)動(dòng)電機(jī)與發(fā)動(dòng)機(jī)的輸出轉(zhuǎn)矩,隨著研究的深入,如何在滑轉(zhuǎn)和失穩(wěn)時(shí)合理分配驅(qū)動(dòng)電機(jī)、發(fā)動(dòng)機(jī)和制動(dòng)機(jī)構(gòu)間的驅(qū)動(dòng)力/制動(dòng)力將受到研究人員的重視.
3.3 驅(qū)動(dòng)電機(jī)及其控制技術(shù)
驅(qū)動(dòng)電機(jī)是機(jī)電復(fù)合驅(qū)動(dòng)混合動(dòng)力車(chē)輛的關(guān)鍵部件之一.從工作要求來(lái)看,驅(qū)動(dòng)電機(jī)要有較寬的調(diào)速范圍及恒轉(zhuǎn)矩范圍,以及較高的過(guò)載系數(shù),能在較寬的工作區(qū)域內(nèi)高效運(yùn)行;其次,驅(qū)動(dòng)電機(jī)工作過(guò)程中會(huì)有轉(zhuǎn)矩模式和轉(zhuǎn)速模式,電機(jī)控制應(yīng)當(dāng)精確、穩(wěn)定且響應(yīng)迅速;另外,驅(qū)動(dòng)電機(jī)還要有較高的功率密度,且成本不能過(guò)高,散熱、耐溫和耐潮性能要強(qiáng),能在較惡劣的環(huán)境下長(zhǎng)期工作.
傳統(tǒng)車(chē)輛為保證換擋平順,需要通過(guò)離合器分離、接合和同步器同步接合套與接合齒圈轉(zhuǎn)速來(lái)減小換擋沖擊.機(jī)電復(fù)合驅(qū)動(dòng)混合動(dòng)力車(chē)輛的電驅(qū)橋可以取消離合器和同步器,利用電機(jī)快速精確的轉(zhuǎn)矩與轉(zhuǎn)速響應(yīng),與換擋機(jī)構(gòu)協(xié)調(diào)控制,實(shí)現(xiàn)平順換擋.這種換擋控制可改善車(chē)輛動(dòng)力中斷過(guò)長(zhǎng)與換擋沖擊較大的不足,同時(shí)可降低系統(tǒng)成本與重量,提高傳遞效率.在無(wú)離合器、無(wú)同步器的換擋系統(tǒng)中,對(duì)電機(jī)的轉(zhuǎn)速調(diào)節(jié)能力提出更高的要求,是未來(lái)的研究重點(diǎn).
相比于電機(jī)+驅(qū)動(dòng)橋的結(jié)構(gòu)布置,輪轂電機(jī)直接驅(qū)動(dòng)車(chē)輪的布置有一系列優(yōu)勢(shì):傳遞效率高,控制靈活,可降低整車(chē)質(zhì)量,能有效地節(jié)省底盤(pán)空間,從而增加乘客空間.這種布置對(duì)電機(jī)提出更高的要求:體積更小,扭矩更大,更高的能量回收效率.輪轂電機(jī)是驅(qū)動(dòng)電機(jī)重要的研究方向之一.


4 結(jié) 論
機(jī)電復(fù)合驅(qū)動(dòng)混合動(dòng)力技術(shù)是近年逐漸發(fā)展起來(lái)的,國(guó)內(nèi)外學(xué)者將研究重點(diǎn)放在串聯(lián)式、并聯(lián)式和混聯(lián)式混合動(dòng)力車(chē)輛上,所以機(jī)電復(fù)合驅(qū)動(dòng)技術(shù)的研究成果相對(duì)較少.國(guó)外學(xué)者更多地關(guān)注車(chē)輛穩(wěn)定性控制,國(guó)內(nèi)學(xué)者則更多的對(duì)能量控制策略展開(kāi)研究,但都處于起步階段,發(fā)展空間很大.
隨著人工智能、車(chē)聯(lián)網(wǎng)、大數(shù)據(jù)技術(shù)的發(fā)展,混合動(dòng)力車(chē)輛將能通過(guò)衛(wèi)星定位系統(tǒng)、智能駕駛系統(tǒng)和智能交通系統(tǒng),融合現(xiàn)代通信與網(wǎng)絡(luò)技術(shù),獲取下一路段的路況信息,采用智能控制方法預(yù)測(cè)未來(lái)一段路線上的駕駛功率需求,為車(chē)輛控制提供判斷基礎(chǔ),充分發(fā)揮機(jī)電復(fù)合驅(qū)動(dòng)車(chē)輛的優(yōu)勢(shì).隨著微電網(wǎng)技術(shù)的發(fā)展和V2G(vehicle to grid)概念的提出,插電式機(jī)電復(fù)合驅(qū)動(dòng)混合動(dòng)力技術(shù)將是發(fā)展的新方向,車(chē)輛與電網(wǎng)智能互聯(lián),有效地儲(chǔ)存和循環(huán)電能.
從國(guó)家戰(zhàn)略發(fā)展的角度來(lái)看,政府制定實(shí)施了一系列新能源汽車(chē)發(fā)展政策,車(chē)企將在未來(lái)的某個(gè)節(jié)點(diǎn)停售燃油車(chē).而據(jù)公安交管局統(tǒng)計(jì),截止2017年3月底,我國(guó)機(jī)動(dòng)車(chē)保有量突破3億輛,其中,汽車(chē)達(dá)2億輛,傳統(tǒng)燃油車(chē)的基數(shù)大,直接摒棄是不現(xiàn)實(shí)的,將傳統(tǒng)燃油車(chē)改裝為機(jī)電復(fù)合驅(qū)動(dòng)混合動(dòng)力車(chē)輛是有效可行的方式.
機(jī)電復(fù)合混合動(dòng)力車(chē)輛的機(jī)械橋與電驅(qū)橋獨(dú)立驅(qū)動(dòng),僅需在傳統(tǒng)車(chē)輛的結(jié)構(gòu)基礎(chǔ)上加裝驅(qū)動(dòng)電機(jī)及控制器,成本較低,有很好的應(yīng)用前景.尤其是對(duì)卡車(chē)而言,其底盤(pán)空間大,可操作性更強(qiáng).兩套動(dòng)力驅(qū)動(dòng)系統(tǒng)可以保證車(chē)輛在一套系統(tǒng)失效的情況下帶故行駛,提高了行駛可靠性.該構(gòu)型能有效地解決現(xiàn)役發(fā)射平臺(tái)動(dòng)力性提升、超大型發(fā)射平臺(tái)發(fā)動(dòng)機(jī)功率不足等問(wèn)題.
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 54



 廣告
廣告 編輯推薦




最新資訊
-
“汽車(chē)爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開(kāi)發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車(chē)備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車(chē)前照燈配光性能的工
2026-03-03 12:07
