




 廣告
廣告





















































首頁 > 汽車測試技術(shù) > 正文
自動駕駛虛擬仿真測試介紹
2020-06-27 22:05:34· 來源:自動駕駛測試驗證技術(shù)創(chuàng)新論壇

自動駕駛虛擬仿真測試介紹(1):是什么一、引子二、自動駕駛汽車的仿真測試的不同手段三、不同仿真測試手段的選擇 本系列嘗試從是什么、為什么、用什么測、怎么
自動駕駛虛擬仿真測試介紹(1):是什么
一、引子
二、自動駕駛汽車的仿真測試的不同手段
三、不同仿真測試手段的選擇
“ 本系列嘗試從是什么、為什么、用什么測、怎么測和誰來測等方面來介紹什么是自動駕駛虛擬仿真測試。這是第一篇,介紹什么是自動駕駛仿真測試。”
一、引子
說到仿真測試大家可能會覺得陌生,不過其原理其實已經(jīng)被廣泛采用。
比如李雷想要開車從北京去上海,但是不知道需要多長時間,于是他做了這樣的估算:
北京到上海距離s=1200km,開車時速v=120km/h,那么需要的時間為t=s/v=10h;考慮到不是全程高速、中間可能會休息,假設(shè)平均時速v’=80km/h會更合理,于是需要的時間為t=s/v’=15h。

通過這個例子,我們可以體會到兩點:
仿真即是通過一組公式模仿真實世界,或者說使用一個數(shù)學(xué)模型簡化替代真實世界;
數(shù)學(xué)模型的復(fù)雜度越高,計算結(jié)果與真實世界越相近,但是建模難度越高、計算速度越慢。
二、自動駕駛汽車的仿真測試的不同手段
我們首先考慮真實世界的情況,自動駕駛汽車在開放道路進行測試時,可以用下圖來表示:
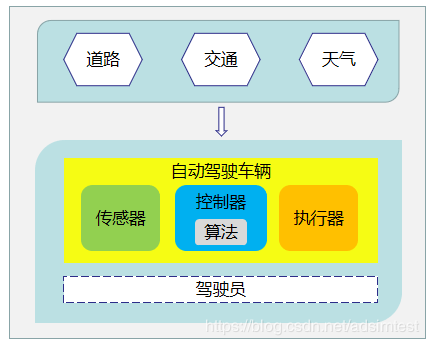
自動駕駛車輛主要由傳感器、控制器和執(zhí)行器構(gòu)成(當(dāng)然這主要是指自動駕駛部分,車身、底盤等傳統(tǒng)車輛部分暫且不提),駕駛員駕駛車輛在不同的道路、交通和天氣環(huán)境下接受測試。當(dāng)然高級別的自動駕駛不需要駕駛員,所以圖中用虛線表示。
當(dāng)在仿真環(huán)境中模擬其中的不同部分時,可以得到仿真測試的不同手段。列舉如下表所示:
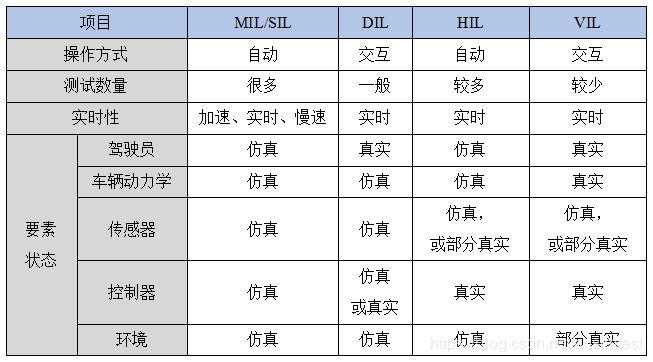
注:后面會有一篇詳細(xì)介紹不同仿真測試手段的區(qū)別,敬請關(guān)注。
三、不同仿真測試手段的選擇
經(jīng)常會有人遇到要不要做HIL、要不要買個視頻暗箱、要不要買個駕駛模擬器等等疑問,這時如果能先自問自答這樣一個問題應(yīng)該會有所幫助:我們準(zhǔn)備測試的被測對象是什么?
如果被測對象僅僅是開發(fā)階段的算法,那只使用MIL/SIL就可以;如果被測對象是要在實車使用的控制器,那可能需要一套HIL設(shè)備提前進行測試、提前發(fā)現(xiàn)問題。如果不采用視頻暗箱、雷達回波模擬器等設(shè)備就不能實現(xiàn)測試閉環(huán),那此類傳感器信號仿真設(shè)備也是需要的。
諸如此類,如果能時刻謹(jǐn)記被測對象是什么和測試目的是什么,應(yīng)該對選擇仿真測試手段有很大幫助。
————————————————
自動駕駛虛擬仿真測試介紹(2):為什么
一、仿真測試是汽車工程師的自然需求
二、仿真測試是汽車開發(fā)流程的必然要求
三、仿真測試是自動駕駛開發(fā)的必經(jīng)之路
“ 本系列嘗試從是什么、為什么、測什么、用什么測、怎么測和誰來測等方面來介紹什么是自動駕駛虛擬仿真測試。這是第二篇,介紹為什么要進行仿真測試。”
一、仿真測試是汽車工程師的自然需求
仿真測試其實在結(jié)構(gòu)開發(fā)領(lǐng)域早已廣泛應(yīng)用。如果說驗證一個螺栓強度還可以翻手冊、使用公式計算,那么對于一些復(fù)雜的零件的強度校核和結(jié)構(gòu)優(yōu)化,就要借助仿真手段,這就是CAE(Computer Aided Engineering),比如下圖中對零件的應(yīng)力分布計算。CAE手段的使用有效減少了樣件的數(shù)量,縮短了試驗時間,節(jié)省了開發(fā)成本。
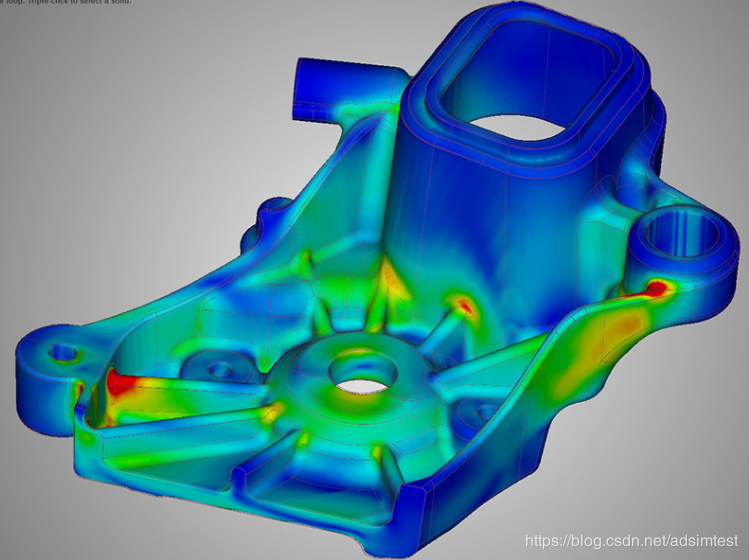
這些好處主要是零部件結(jié)構(gòu)開發(fā)部門所享受,算法和控制器的開發(fā)部門自然很是羨慕。
我們可不可以在算法開發(fā)階段就進行測試發(fā)現(xiàn)一些低級錯誤?
可不可以在辦公室就可以對算法和控制器進行測試,而不是每個版本的新程序都要到實車上測試、在寒冬酷暑的室外調(diào)試很久?
可不可以在計算機上對真實世界中危險或不易實現(xiàn)的場景進行測試?
可不可以在解決bug或算法升版后,對之前的測試場景方便的進行重復(fù)測試?
欣慰的是,這些需求仿真測試都可以滿足。
二、仿真測試是汽車開發(fā)流程的必然要求
V模型是廣泛在軟件開發(fā)和測試中使用流程,如下圖所示:
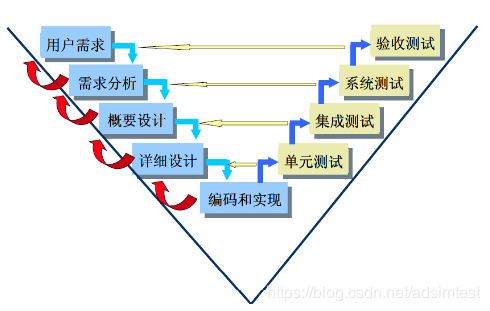
V模型要求在開發(fā)團隊進行不同階段的開發(fā)同時,測試團隊編制對應(yīng)的測試用例,并在開發(fā)階段完成后立即進行測試。這就要求在集成測試、系統(tǒng)測試等暫無完整產(chǎn)品樣件的情況下,就開始進行測試。
另外,有數(shù)據(jù)表明,在汽車電控系統(tǒng)的開發(fā)過程中,越早發(fā)現(xiàn)問題則修正問題的成本越低。在開發(fā)的早期,就建立起測試驗證的手段,快速高效的發(fā)現(xiàn)和解決開發(fā)過程中的問題,可以有效減低開發(fā)成本、提高開發(fā)效率。

而在開發(fā)的早期進行測試,在暫無完整產(chǎn)品樣件的情況下進行測試,就需要仿真手段提供測試環(huán)境。
三、仿真測試是自動駕駛開發(fā)的必經(jīng)之路
自動駕駛汽車是一個新生事物,消費者對其安全性還不夠信任。那么,自動駕駛汽車的安全性達到什么水平才能被消費者接受呢?我想其安全水平不低于人類駕駛員,應(yīng)該是一個最起碼的要求。
根據(jù)RAND公司一份名為《Driving to Safety》的報告,要證明自動駕駛汽車相比于人類駕駛員能夠減少20%交通事故死亡率,需要進行約80億公里的公共道路測試,假設(shè)由100輛車組成的車隊每年365天每天24小時不間歇的以40km/h的平均速度進行測試,大概需要225年。
這個測試時間顯然是不現(xiàn)實的。就要求在實車測試之外,尋求其他的方法,大幅縮短測試時間。
在虛擬環(huán)境下進行大規(guī)模的仿真測試,成為了必須選擇的方法。比如waymo公司的CarCraft仿真平臺中,有25000臺仿真車輛同時進行測試,每天總計可進行1200萬公里的測試。按照這個速度,完成上面提到的80億公里的測試,僅需要2年。
————————————————
自動駕駛虛擬仿真測試介紹(3):測什么
一、自動駕駛算法構(gòu)成
二、自動駕駛仿真測試的兩個階段
“ 本系列嘗試從是什么、為什么、測什么、用什么測、怎么測和誰來測等方面來介紹什么是自動駕駛虛擬仿真測試。這是第三篇:測什么,介紹仿真測試的被測對象是什么。”
一、自動駕駛算法構(gòu)成
一個完整的自動駕駛算法,可以粗略的用下圖表示。
傳感器的感知模塊從真實環(huán)境中獲取信息,并將其轉(zhuǎn)換為原始信號發(fā)送給識別模塊;識別模塊從原始信號中識別出目標(biāo),并發(fā)出目標(biāo)列表。比如攝像頭的原始信號為圖片數(shù)據(jù),激光雷達的原始信號為點云數(shù)據(jù),識別模塊從中識別出前方目標(biāo)的類型、位置和速度等信息。
融合模塊對來自不同傳感器的目標(biāo)列表進行處理后,發(fā)出統(tǒng)一的目標(biāo)列表給決策模塊。決策模塊分析目標(biāo)列表,對目標(biāo)未來的狀態(tài)進行預(yù)測,并規(guī)劃自車的行駛路徑??刂颇K根據(jù)目標(biāo)行駛路徑,發(fā)出加速、制動和轉(zhuǎn)向等控制指令,對車輛狀態(tài)進行控制。
根據(jù)上面的分析,大體上可以將一個完整的自動駕駛算法分為兩個部分:
(1)感知識別模塊,其輸入是外部環(huán)境,輸出是目標(biāo)列表;
(2)決策控制模塊,其輸入是目標(biāo)列表,輸出是對車輛的控制指令。
二、自動駕駛仿真測試的兩個階段
遠(yuǎn)期的目標(biāo),自然是對完整的自己駕駛算法進行仿真測試,不過考慮到近期的實際情況,大致要分為兩個發(fā)展階段(當(dāng)然這兩個階段可能并沒有明顯的時間界限)。
(1)階段一:
在試驗室和封閉試驗場內(nèi)對傳感器的感知識別模塊進行測試,在虛擬仿真環(huán)境對決策控制模塊進行測試,仿真環(huán)境直接向決策控制模塊提供目標(biāo)列表。
這主要是因為目前對傳感器的建模還有很多局限,從而不能進行有效(甚至是正確)的仿真。比如攝像頭輸出的圖片較容易仿真,但是污漬、強光等特性仿真難度較大;而對于毫米波雷達如果建立精度較高的模型,計算速度較慢,不能滿足仿真測試的需求。
在試驗室和封閉試驗場可以對測試環(huán)境進行完整的控制和數(shù)據(jù)記錄。比如布置不同類別、位置和速度的行人和車輛,甚至可以對雨、雪、霧和強光的環(huán)境要素進行模擬,并將傳感器處理輸出的目標(biāo)列表與真實環(huán)境進行對比,從而給出對感知識別模塊的評估結(jié)果和改進建議。
這么做的好處是,在傳感器建模有很多局限的情況下,依然能夠在仿真環(huán)境下對決策控制模塊進行測試,提前享受仿真測試的優(yōu)勢。
(2)階段二:
在虛擬仿真環(huán)境進行高精度的傳感器建模,從而對完整的自動駕駛算法進行測試。
這樣不僅可以在同一環(huán)境下進行測試,從而提高測試效率、測試場景覆蓋率和復(fù)雜度;而且可以對一些基于AI的算法進行端到端的測試。
這一階段的難點,一方面是前面提到的滿足測試需求的傳感器建模,另外一方面是不同傳感器廠家和OEM廠家直接交互的接口很可能不一致(有些情況下可能并不存在)。
————————————————
自動駕駛虛擬仿真測試介紹(4):用什么測
一、仿真測試平臺的構(gòu)成
二、仿真測試工具的流派
三、仿真測試工具的選擇
“ 本系列嘗試從是什么、為什么、測什么、用什么測、怎么測和誰來測等方面來介紹什么是自動駕駛虛擬仿真測試。這是第四篇:用什么測,介紹自動駕駛虛擬仿真測試平臺的構(gòu)成。”
一、仿真測試平臺的構(gòu)成
我們在上一篇《測什么》中用了一張圖來概括自動駕駛算法的構(gòu)成:
自動駕駛算法通過各種傳感器探測周圍環(huán)境的狀態(tài),進行決策后對車輛進行控制。為了在仿真環(huán)境對自動駕駛算法進行測試,需要模擬自動駕駛算法的各種輸入,并響應(yīng)其輸出,從而“欺騙”它,讓它以為在真實世界工作。
為此,對照真實世界,仿真測試平臺由交通場景模塊、傳感器模塊、車輛動力學(xué)模塊和測試管理模塊構(gòu)成。如下圖所示:
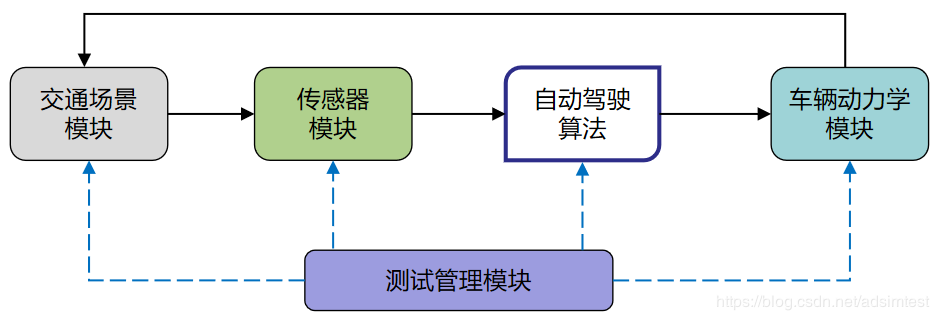
(1)交通場景模塊
交通場景模塊用于模擬車輛運行的外部世界。
一方面,模擬各種交通場景要素,比如:①高速公路、城市道路等不同的道路結(jié)構(gòu);②標(biāo)志標(biāo)線、護欄、交通燈等道路附屬設(shè)施;③轎車、卡車、摩托車、行人等交通參與者;④路障、錐桶、遺撒物等臨時物體;⑤晴、陰、雨、雪、白天、黑夜等不同的天氣。
另一方面,模擬不同交通場景要素之間的組合和動態(tài)關(guān)系,即不同的“場景”。比如:高速公路上,一輛轎車在被測車輛前方快速切入;十字路口黃燈時,一輛卡車在被測車輛前方緊急制動停車。
(2)傳感器模塊
傳感器模塊用于模擬車輛上安裝的各種傳感器,從而獲得交通場景的狀態(tài)。
一方面,根據(jù)傳感器種類的不同,模擬不同的信號內(nèi)容,比如:攝像頭傳感器輸出圖像信號,激光雷達傳感器輸出點云信號,導(dǎo)航傳感器輸出定位信號。
另一方面,根據(jù)傳感器特性和參數(shù)的不同,模擬出其“局限”,比如:傳感器的探測范圍,攝像頭的畸變和炫光,不同材質(zhì)對激光雷達光線吸收的影響,護欄對毫米波雷達的雜波影響。
(3)車輛動力學(xué)模塊
車輛動力學(xué)模塊用于模擬車輛本身對自動駕駛算法控制的響應(yīng),特別是對加速、制動和轉(zhuǎn)向的響應(yīng)。
車輛動力學(xué)模塊一般參照真實車輛,由車身、動力傳動系統(tǒng)、懸架系統(tǒng)、轉(zhuǎn)向系統(tǒng)、制動系統(tǒng)和車輪等不同的子系統(tǒng)構(gòu)成。
(4)測試管理模塊
測試管理模塊,負(fù)責(zé)對以上三個部分組成的仿真測試環(huán)境的管理,保證仿真測試的效果和效率。
一方面,對測試流程進行管理,比如:測試用例的選擇、測試的啟動和終止、仿真模塊的調(diào)度。另一方面,對測試數(shù)據(jù)進行管理,比如:測試用例的更新、測試數(shù)據(jù)的記錄和分析、測試報告的生成。
二、仿真測試工具的流派
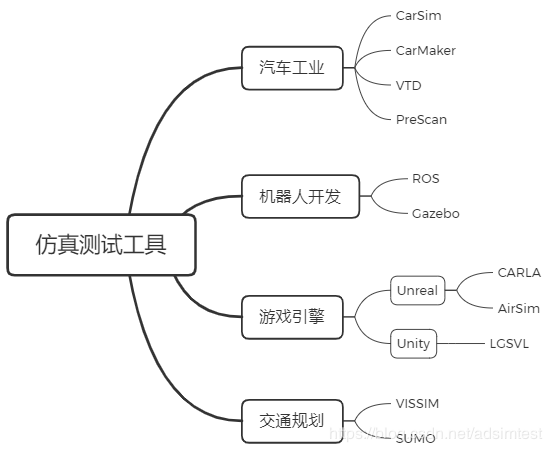
目前常見的仿真測試工具有很多種,根據(jù)自動駕駛開發(fā)團隊的來源,大致可分為如下幾個流派:傳統(tǒng)主機廠傾向于使用汽車工業(yè)的商業(yè)軟件,使用機器人平臺開發(fā)自動駕駛算法的團隊常常使用ROS/Gazebo,很多擅長計算機圖形學(xué)的團隊基于游戲引擎開發(fā)仿真工具。而大規(guī)模復(fù)雜交通流的仿真需求,則由交通規(guī)劃領(lǐng)域的軟件來滿足。
下圖列舉了一些常見的工具:
比如汽車工業(yè)的CarSim、CarMaker、VTD和PreScan,機器人開發(fā)的ROS和Gazebo,基于游戲引擎的CARLA、AirSim和LGSVL,以及交通規(guī)劃軟件VISSIM和SUMO。
三、仿真測試工具的選擇
如上一篇《測什么》中所說,一個完整的、精度高的仿真測試平臺自然是最終的目標(biāo),但是在實際的自動駕駛開發(fā)中,團隊一定會根據(jù)當(dāng)下的具體需求和成本限制進行選擇。
比如:是否需要高精度的傳感器模型?如果想采用VISSIM等工具模擬區(qū)域交通流,是否有合乎實際的交通調(diào)查數(shù)據(jù)?自動駕駛算法測試使用的車輛動力學(xué)模型,是否要與底盤調(diào)教的車輛模型使用一樣的精度?高保真的視覺場景是否滿足測試效率的要求?成熟的商業(yè)軟件是否滿足特定的需求?采用開源軟件的話,團隊的能力和項目進度是否允許?
等等諸如此類的問題,都需要根據(jù)不同的實際情況仔細(xì)評估后,再做選擇。
————————————————
自動駕駛虛擬仿真測試介紹(5):怎么測
一、較低等級和較高等級自動駕駛的測試差異
二、基于用例和基于場景的測試
三、測試場景的來源
“ 本系列嘗試從是什么、為什么、測什么、用什么測、怎么測和誰來測等方面來介紹什么是自動駕駛虛擬仿真測試。這是第五篇:怎么測,介紹自動駕駛虛擬仿真測試的方法。”
一、較低等級和較高等級自動駕駛的測試差異
較低等級(L1L2)的自動駕駛或者說ADAS,與較高等級(L3-L4)自動駕駛相比,有個直觀上比較大的區(qū)別是:較低等級的自動駕駛面對的工況復(fù)雜度和工況范圍比較小,或者說由于駕駛行為的主要由人類駕駛員負(fù)責(zé),自動駕駛系統(tǒng)僅需處理有限數(shù)量的、確定的工況即可;而較高等級的自動駕駛,駕駛行為主要由自動駕駛系統(tǒng)負(fù)責(zé),其處理的工況復(fù)雜度和工況范圍很大,甚至不能提前預(yù)知。這種對比,可以用下圖做一個示意:

ADAS用一個較窄的矩形表示,高等級自動駕駛用一個較大的矩形表示?;趦烧叩倪@個差異,ADAS可以使用基于用例的測試方法較好的進行測試,而高等級自動駕駛則需要使用基于場景的測試方法。
二、基于用例和基于場景的測試
基于用例的測試方法,即是預(yù)設(shè)測試輸入和測試過程,通過查看被測算法是否實現(xiàn)預(yù)期的功能來評價是否通過測試。比如對ACC的測試,預(yù)先設(shè)定被測車輛和前車的初始車速,以及前車減速的時刻和減速度,查看被測車輛是否能夠跟隨減速停車。
基于場景的測試方法,即是預(yù)設(shè)測試輸入,但不預(yù)先設(shè)定測試過程,只設(shè)定交通車輛的行為,給予被測算法較大的自由度,通過查看被測算法是否達成預(yù)期的目標(biāo)來評價是否通過測試。比如對直線道路行駛的測試,預(yù)先設(shè)定被測車輛和前車的初始車速,以及前車減速的時刻和減速度,但是不限定被測車輛是通過減速還是換道超車的方式避免與前車相撞。
造成對于不同等級的自動駕駛功能需要使用不同的測試方法的一個原因是:低等級的自動駕駛一般能夠分解為簡單而獨立的功能,可以把單一功能作為被測對象;而高等級的自動駕駛較難分解成簡單而獨立的功能,只得把整個自動駕駛系統(tǒng)或其相對較大的一部分作為被測對象。
三、測試場景的來源
若想對自動駕駛功能進行較全面的測試,就需要得到盡可能全面覆蓋其真實運行工況的測試場景。為獲得這些測試場景,大體上可以有兩種思路:
第一種思路是:①通過真實道路數(shù)據(jù)采集和理論分析等方式,得到不同的場景類型(即功能場景),②再分析出這些不同場景類型中的關(guān)鍵參數(shù),并通過真實數(shù)據(jù)統(tǒng)計和理論分析等方法得到這些關(guān)鍵參數(shù)的分布范圍(即邏輯場景),③最后選取其中一組參數(shù)的取值作為一個測試場景(即具體場景)。如下圖所示:

第二種思路是:采集自動駕駛車輛預(yù)定工作區(qū)域內(nèi)的交通流量數(shù)據(jù),并將這些數(shù)據(jù)輸入交通仿真工具中產(chǎn)生交通流,并使用該交通流充當(dāng)自動駕駛車輛的周圍交通車輛,實現(xiàn)測試場景的自動生成。
最后,感謝您寶貴的正激勵和正反饋。
————————————————
版權(quán)聲明:本文為CSDN博主「自動駕駛仿真測試」的原創(chuàng)文章,遵循CC 4.0 BY-SA版權(quán)協(xié)議,轉(zhuǎn)載請附上原文出處鏈接及本聲明。
原文鏈接:https://blog.csdn.net/adsimtest/article/details/106604504



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
