




 廣告
廣告





















































首頁 > 汽車測試技術(shù) > 正文
利用 ADAS 傳感器在車載自組網(wǎng)中檢測定位欺騙
2020-10-26 22:50:33· 來源:軒轅實驗室

本文來源:Lim K , Tuladhar K M , Kim H . Detecting Location Spoofing using ADAS sensors inVANETs. IEEE, 2018.位置信息在車載自組織網(wǎng)絡(luò)中起著至關(guān)重要的
本文來源:Lim K , Tuladhar K M , Kim H . Detecting Location Spoofing using ADAS sensors in VANETs. IEEE, 2018.
“位置信息在車載自組織網(wǎng)絡(luò)中起著至關(guān)重要的作用,許多應(yīng)用都依賴于位置,因此,保持車輛位置信息的真實性至關(guān)重要。隨著車輛技術(shù)的進步,高級駕駛輔助系統(tǒng)(ADAS)傳感器正陸續(xù)安裝在汽車上,本文提出了一種利用車載ADAS傳感器檢測定位欺騙的機制,在我們提出的方案下,基于定位欺騙的攻擊(如sybil攻擊)可以使用唯一的ADAS傳感器數(shù)據(jù)(類似于指紋)來有效地檢測,而無需基礎(chǔ)設(shè)施和第三方可信機構(gòu)的參與。”
一、 定位欺騙
車輛通信有眾多安全要求,因為它涉及安全駕駛環(huán)境的應(yīng)用,如交通信息、天氣狀況、道路緊急情況、導(dǎo)航、增值應(yīng)用等。大多數(shù)上述應(yīng)用依賴于位置信息。如果車輛的位置信息被泄露,則大多數(shù)應(yīng)用程序?qū)o法正常運行。此外,錯誤或誤導(dǎo)的位置信息可能會引發(fā)事故,造成經(jīng)濟損失,甚至威脅司機的生命。
GPS的提供徹底改變了駕駛導(dǎo)航系統(tǒng)。類似地,最近引入的短程雷達(無線電探測和測距)和激光雷達(光探測和測距)提供了為車輛創(chuàng)建周圍地圖的“眼睛”,并應(yīng)用于高級駕駛員輔助系統(tǒng) (ADAS) ,通過提供事故注意警告來幫助導(dǎo)航與防止可能的事故 。雖然先進的傳感技術(shù)正在引導(dǎo)車輛走向聯(lián)網(wǎng)車輛和全自主車輛,但車輛通信應(yīng)抵御可能的攻擊者。
基于定位欺騙的攻擊手段可以分類如下:1) 偽造攻擊: 創(chuàng)建一個偽造的消息,謊報交通擁堵的位置或它自己的位置。2) 變更攻擊: 攻擊者修改消息中的位置或自己的位置信息。3) 丟包: 攻擊者可以通過黑洞攻擊 (丟棄所有數(shù)據(jù)包) 或灰洞攻擊 (選擇性丟棄數(shù)據(jù)包) 來丟棄數(shù)據(jù)包。4) 重放攻擊: 攻擊者偽裝成過往車輛,重新注入之前接收到的數(shù)據(jù)包或信標(biāo)消息。5) 西比爾(sybil)攻擊: 攻擊者用假的位置信息偽裝成多輛車,可以通告不存在的鄰居。
之前的定位欺騙檢測方法都需要基礎(chǔ)設(shè)施和/或第三方機構(gòu) (如技術(shù)顧問) 來管理和維護證書。在本文中,我們提出了一種無需基礎(chǔ)設(shè)施和/或第三方機構(gòu)支持的定位欺騙攻擊檢測方案。此外,我們的方案利用安裝在車輛上的現(xiàn)有 ADAS 傳感器來檢測定位欺騙攻擊,因此不需要任何額外的硬件成本。
二、 系統(tǒng)模型與假設(shè)
無線收發(fā)器:對于快速和短程無線通信,車輛收發(fā)器采用為 VANET 標(biāo)準(zhǔn) IEEE802.11p 設(shè)計的標(biāo)準(zhǔn)專用短程通信 (DSRC) 。智能交通系統(tǒng)的DSRC在美國工作在 5.9 GHz 頻段。傳輸范圍約為 250 至 300 米。我們假設(shè)攻擊者可以在傳輸之前修改消息中的位置信息。
GPS 定位接收器:車輛使用 GPS 接收器獲得精確的位置信息,例如緯度、經(jīng)度、高度、速度和車輛的方向。GPS的位置可以由攻擊者偽造,但車輛的相對距離和角度可以通過 ADAS 傳感器計算,從而可以驗證位置信息。
ADAS 傳感器:現(xiàn)代車輛配備了 ADAS 傳感器,包括雷達、激光雷達、攝像機和其他傳感器,如微波、紅外或超聲波雷達。與激光雷達相比,雷達是一種低成本傳感器,它提供更長的工作距離。同樣,高分辨率攝像機與圖像處理相結(jié)合,可以用來識別物體類型。最近應(yīng)用的激光雷達使自動駕駛汽車成為可能,因為它可以提供連續(xù) 360 度的能見度和周圍的準(zhǔn)確深度信息。我們假設(shè)一個光線投射激光雷達安裝在車輛的頂部,它生成周圍投射點的幀。由 ADAS 傳感器系統(tǒng)生成的幀是原始形式,由車輛的車載單元 (OBU) 處理。處理后的數(shù)據(jù)可以找到車輛周圍物體的距離和角度。本文主要致力于檢測攻擊者與沿路行駛的鄰近車輛同處一地的定位欺騙攻擊。如圖 1 所示,裝有ADAS傳感器的車輛掃描周邊區(qū)域,并檢測車輛的周圍物體。攻擊者聲稱位置是假的,并試圖與車輛通信。車輛隨后驗證所聲稱的位置是真的還是假的。
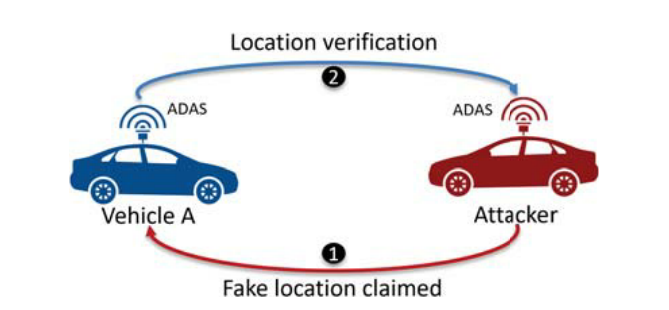
圖1:位置欺騙檢測總覽
三、 方案
我們提出的方案使用三個主要步驟來檢測定位欺騙攻擊:1) 源驗證;2) 接收方確認(rèn);3) 周圍物體驗證。我們討論我們協(xié)議的細節(jié)如下。
當(dāng)接收方車輛 VR 從源車輛 VS 接收到帶有 GPS 信息 和傳感器數(shù)據(jù) sensor_data 的消息 M 時,VR 運行算法 1 中所示的檢測定位欺騙的算法。為了開始該過程,VR 檢查包含在 M 中的時間戳是否有效并且在閾值 τ 內(nèi)。如果時間戳有效,VR 使用 VS 和 VR 的 GPS 信息計算從 VR 到 VS 的距離 dRS 和角度 ?RS。注意,距離和角度是以目標(biāo)車輛為中心點來計算的。例如,如果車輛位于 (x1,y1) 位置,而目標(biāo)車輛位于 (x2,y2) 位置, 則可以使用等式 1 和等式 2 來計算距離和角度。
通過使用 dRS 和 ?RS,VR計算其位置,并將其與sensor_dataR 比較以查看 VS 是否實際存在于 VS 聲稱的位置。如果 VS 不存在 sensor_dataR 中的位置,則檢測到位置欺騙。算法 1 的第 6-11 行說明了源驗證的過程。一旦源位置得到驗證,接收器的位置也需要在源的傳感器數(shù)據(jù) sensor_dataS 中得到確認(rèn)。類似地,計算從VS 到 VR 的距離 dSR 和角度 ?SR,并在傳感器數(shù)據(jù)中確認(rèn) VR 的位置。如果在傳感器數(shù)據(jù) sensor_dataS 中找不到接收方,則可能存在定位欺騙。接收方驗證過程如第 13-18 行所示。
在驗證了源 VS 和接收器 VR 的位置之后,VR 繼續(xù)驗證 VS 的周圍對象, 因為 VS 的 ADAS 傳感器系統(tǒng)捕獲的 VS 的周圍對象也應(yīng)該被 VR 的 ADAS 傳感器系統(tǒng)捕獲。請注意,我們假設(shè)時鐘是同步的,并且它們都使用傳感器數(shù)據(jù) sensor_dataS 和同時生成的傳感器數(shù)據(jù) sensor_dataR 。為了驗證 VS 的周圍對象,VR 生成兩個對象列表: 使用傳感器數(shù)據(jù)sensor_dataS 生成的列表 SLi 和使用傳感器數(shù)據(jù)sensor_dataR 生成的列表 S′Li。對象列表包含 距離、角度和對象類型等信息,對象按對 VS 距離順序排序?,F(xiàn)在 VR 比較 SLi 與 S′Li 的距離、角度和對象類型,檢查對象類型是否匹配,同一對象的 距離和角度是否在誤差范圍內(nèi)(?d 和 ??)。第 20-30 行說明了周圍物體驗證的過程。請注意,它將只檢查選定的最近的對象,因為 VR 可能無法通過其傳感器檢測 VS 的所有環(huán)境。在這種情況下,可以使用相似性評分技術(shù)。在驗證了周圍的對象之后,算法終止,沒有檢測到位置欺騙。

四、實現(xiàn)與分析
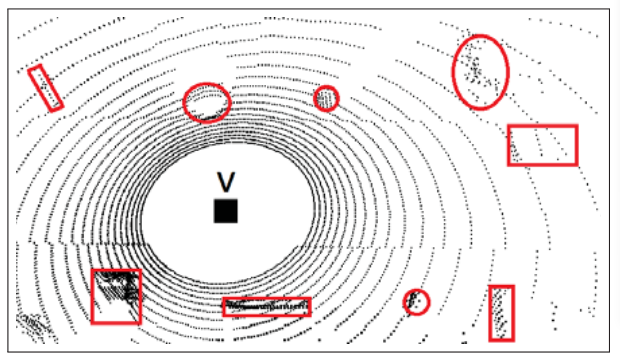
在這一部分,我們介紹了我們的方案的實現(xiàn)和安全性分析。我們使用自主城市駕駛模擬器 CARLA 模擬了我們的方案。模擬中使用的激光雷達的性能類似于 Velodyne HDL-32E,并配置有以下參數(shù):32 個通道,100 米的范圍,每秒點數(shù) (PPS) 固定為 10000,旋轉(zhuǎn)頻率設(shè)置為 10,視場 (FOV) 設(shè)置為 40。傳感器數(shù)據(jù)是在自動駕駛模式下采集的。CARLA 模擬器的模擬環(huán)境如圖 2 所示,其中包含目標(biāo)車輛、樹木、垃圾桶、交通燈等可見物體。激光雷達放置在車輛 v 上,車輛v發(fā)送激光脈沖,并根據(jù)反射脈沖波經(jīng)過的時間掃描物體。請注意,為了覆蓋更長的距離并提高精度,還可以添加雷達數(shù)據(jù),我們在模擬中考慮了 100 米內(nèi)的對象。通過使用 ADAS 傳感器掃描車輛的周邊,可以識別包括源車輛在內(nèi)的周圍物體,并且具有物體檢測的原始數(shù)據(jù)如圖 3 所示。
為了防止位置欺騙攻擊,我們的方案通過匹配位置信息來驗證發(fā)送消息的源車輛的位置,即距離、角度和靠近其周圍的對象類型。它由源、接收方和周圍對象的三個位置驗證步驟組成。車輛的位置通過匹配其周圍的物體來確認(rèn)。整個過程就像一個指紋,即車輛從其獨特的位置到周圍物體有一個獨特的距離和角度。除非車輛位于其聲稱的位置,否則無法生成這種獨特的傳感器信息。在 VANETs 中,敵手可能試圖通過編造、更改或重放位置信息來進行攻擊,但在我們的方案下可以檢測到這種位置欺騙攻擊。
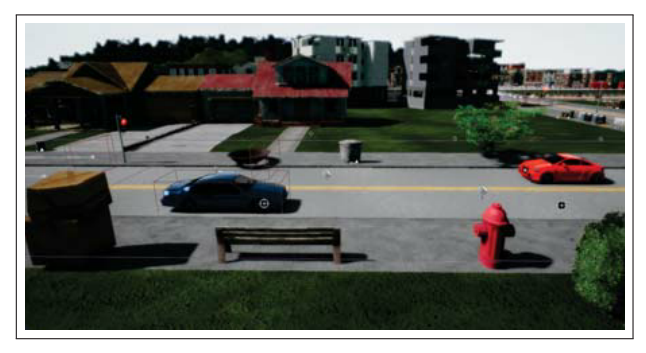
圖二:模擬環(huán)境



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
