




 廣告
廣告





















































自動(dòng)駕駛技術(shù)概述
2021-09-11 23:14:43· 來源:汽車電子與軟件 作者:Stone319

前言自動(dòng)駕駛汽車,通過技術(shù)實(shí)現(xiàn)車輛自動(dòng)駕駛,目的是減少駕駛疲勞、增強(qiáng)駕駛安全。自動(dòng)駕駛汽車按自動(dòng)化程度可分5級(jí):輔助駕駛、部分自動(dòng)駕駛、條件自動(dòng)駕駛、
前言
自動(dòng)駕駛汽車,通過技術(shù)實(shí)現(xiàn)車輛自動(dòng)駕駛,目的是減少駕駛疲勞、增強(qiáng)駕駛安全。
自動(dòng)駕駛汽車按自動(dòng)化程度可分5級(jí):輔助駕駛、部分自動(dòng)駕駛、條件自動(dòng)駕駛、高度自動(dòng)駕駛和完全自動(dòng)駕駛。
完全的自動(dòng)駕駛,可釋放人出行駕駛時(shí)間,把汽車變成除家、辦公室外的人的第三空間,在出行過程中辦公和娛樂等。
車輛要實(shí)現(xiàn)自動(dòng)駕駛,需要解決車輛在哪、往哪兒去、怎么去這三個(gè)基本問題。解決這些問題,涉及硬件平臺(tái)、軟件算法、交互、安全等多個(gè)領(lǐng)域和技術(shù)。本文將就相關(guān)技術(shù)做簡(jiǎn)要概述。
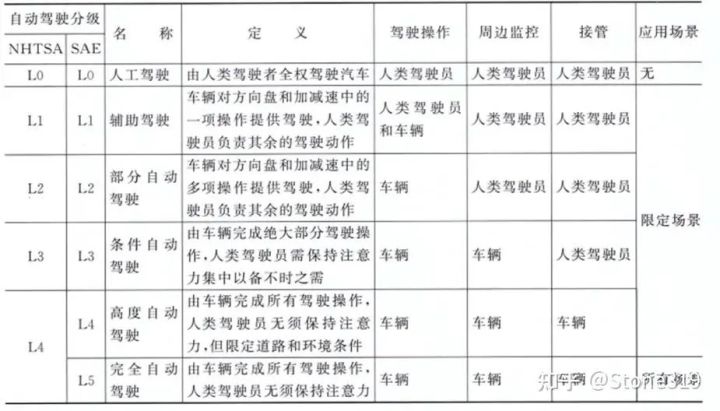
自動(dòng)駕駛等級(jí)分級(jí)
01、系統(tǒng)架構(gòu)
任何一個(gè)控制系統(tǒng),都離不開輸入、控制和輸出三部分。自動(dòng)駕駛系統(tǒng)也如此。
自動(dòng)駕駛車輛,通過傳感器感知周圍環(huán)境信息,輸入到計(jì)算平臺(tái)處理,判斷車輛位置和構(gòu)建駕駛態(tài)勢(shì)地圖;根據(jù)駕駛態(tài)勢(shì)圖,對(duì)車輛運(yùn)動(dòng)進(jìn)行行為決策、路徑規(guī)劃,再精準(zhǔn)控制車輛底盤執(zhí)行器實(shí)現(xiàn)自動(dòng)駕駛。
從硬件上,自動(dòng)駕駛系統(tǒng)包括:收集各種信息輸入的傳感器,對(duì)輸入信息進(jìn)行處理、對(duì)車輛運(yùn)動(dòng)進(jìn)行規(guī)劃和控制的計(jì)算平臺(tái),以及實(shí)現(xiàn)轉(zhuǎn)向、制動(dòng)、加速的底盤執(zhí)行器。
從軟件上,包括感知數(shù)據(jù)處理的感知層,對(duì)車輛運(yùn)動(dòng)規(guī)劃、決策的規(guī)劃層、對(duì)執(zhí)行器精準(zhǔn)控制的控制層。軟件主要集成到計(jì)算平臺(tái)中,部分感知數(shù)據(jù)處理放在智能傳感器中??紤]到處理數(shù)據(jù)越來越大,對(duì)計(jì)算算力要求越來越高,后續(xù)數(shù)據(jù)處理有部分放到云端服務(wù)器的趨勢(shì)。
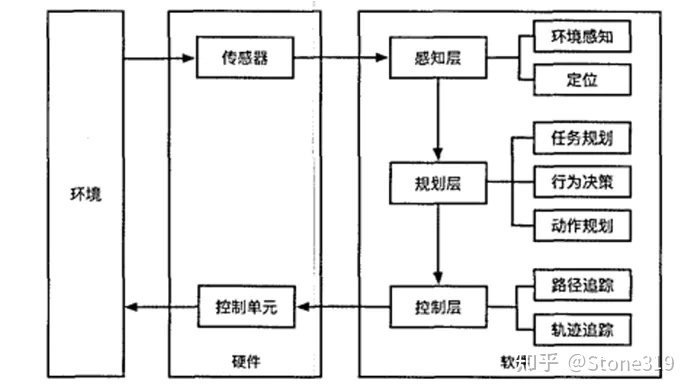
自動(dòng)駕駛系統(tǒng)基本框架
02、硬件平臺(tái)
自動(dòng)駕駛系統(tǒng)硬件,主要包括:智能感知、線控執(zhí)行、計(jì)算平臺(tái)三部分,分別對(duì)應(yīng)于一般控制系統(tǒng)的輸入、輸出和控制。
智能感知包括:用于環(huán)境感知傳感器,如毫米波、激光、超聲波雷達(dá)和相機(jī)等;用于確定車輛位置的定位傳感器,如全球衛(wèi)星導(dǎo)航系統(tǒng)GNSS、慣性導(dǎo)航系統(tǒng)IMU;獲取車輛本體數(shù)據(jù)的自感應(yīng)傳感器,如陀螺儀、車輛CAN總線等。
廣義的講,用于導(dǎo)航的高精度地圖、與其他設(shè)備通信的V2X設(shè)備也是感知硬件之一。
計(jì)算平臺(tái),是對(duì)感知數(shù)據(jù)處理、進(jìn)行規(guī)劃決策并控制執(zhí)行器。由于處理數(shù)據(jù)大、算法復(fù)雜,發(fā)展出了各自類型專用處理芯片,如圖像處理芯片GPU、數(shù)字處理芯片DSP、可編程芯片F(xiàn)PGA和AI芯片等。
線控執(zhí)行,是實(shí)現(xiàn)車輛運(yùn)動(dòng)的執(zhí)行器,由計(jì)算平臺(tái)控制,包括:車輛轉(zhuǎn)向機(jī)構(gòu)、制動(dòng)系統(tǒng)、動(dòng)力系統(tǒng)等。
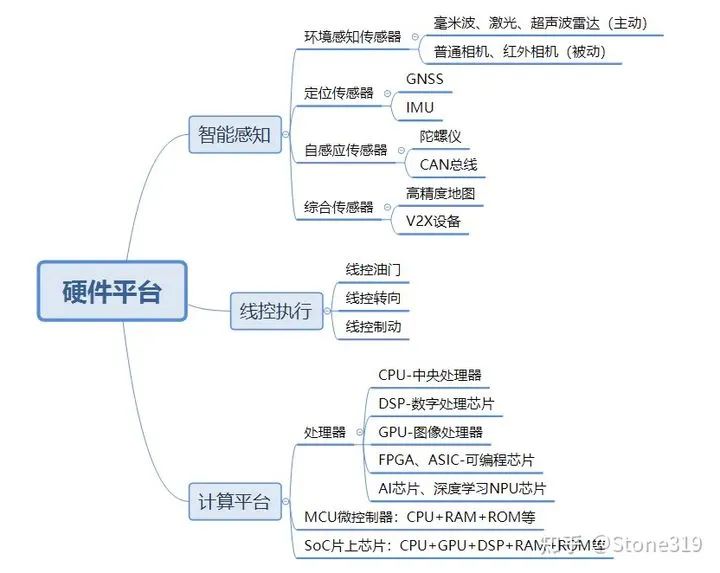
自動(dòng)駕駛系統(tǒng)硬件構(gòu)成
03、軟件平臺(tái)
軟件平臺(tái),除了底層驅(qū)動(dòng)、實(shí)時(shí)操作系統(tǒng)外,上層應(yīng)用主要包括感知層、規(guī)劃層和控制層等程序。技術(shù)上以各種類型感知算法、定位算法、規(guī)劃和控制算法等為核心內(nèi)容。
3.1 感知算法
感知目的,就是告訴自動(dòng)駕駛系統(tǒng)車輛周圍環(huán)境,哪些區(qū)域能通行、哪些有障礙物。
目前廣泛應(yīng)用的方法是間接感知,即通過感知周圍物距離、速度、形狀等,構(gòu)建駕駛態(tài)勢(shì)圖,進(jìn)行規(guī)劃、控制,間接作用于駕駛操作系統(tǒng)。
隨著人工智能技術(shù)發(fā)展,通過深度學(xué)習(xí)將傳感器數(shù)據(jù)(如車輛環(huán)境的圖像)與駕駛操作行為構(gòu)建映射關(guān)系,直接作用于駕駛操作系統(tǒng)方法,是未來發(fā)展趨勢(shì)之一。
感知傳感器各異,優(yōu)劣勢(shì)明顯,如毫米波雷達(dá)擅長(zhǎng)感知目標(biāo)物運(yùn)動(dòng)狀態(tài),相機(jī)更容易提取目標(biāo)物形狀進(jìn)行分類。進(jìn)行各傳感器數(shù)據(jù)融合,充分發(fā)揮各自優(yōu)勢(shì),提高感知冗余、準(zhǔn)確、時(shí)效性,感知融合技術(shù)廣泛應(yīng)用,典型算法有卡爾曼濾波、貝葉斯理論等。
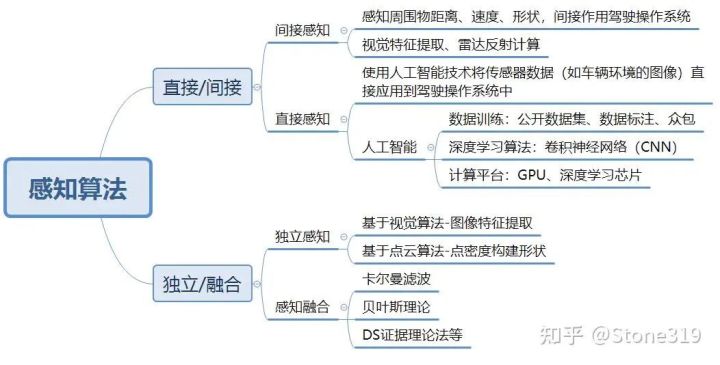
感知算法分類
3.2 定位算法
定位目的,就是告訴自動(dòng)駕駛車輛自己目前在哪。只有精準(zhǔn)的定位,才可能正確的往哪去、怎么去。
全球衛(wèi)星定位系統(tǒng)GNSS,如GPS、北斗等,能告訴我們?cè)诘厍蛏纤幬恢?,但其精度一般是米?jí),不能滿足車輛自動(dòng)駕駛厘米級(jí)要求。一般需要RTK差分技術(shù)輔助,才能實(shí)現(xiàn)厘米級(jí)定位精度。
GNSS有個(gè)問題,一旦被遮擋定位精度就大打折扣,如道路兩邊高樓、繁茂的樹木、隧道內(nèi)、地下和室內(nèi)停車場(chǎng)等場(chǎng)景。這種情況下,一般采用相對(duì)定位方法,通過里程計(jì)法推算實(shí)現(xiàn)短時(shí)間輔助定位,常用的基于慣導(dǎo)IMU,也有通過車輪、相機(jī)、激光雷達(dá)推算。
SLAM,實(shí)時(shí)定位和地圖構(gòu)建,在室內(nèi)機(jī)器人定位被廣泛采用。這是一種通過數(shù)據(jù)特征點(diǎn)匹配的定位方法,常用的分為基于相機(jī)SLAM和基于激光雷達(dá)SLAM。
在汽車上應(yīng)用,相機(jī)SLAM,容易受到光照條件影響;激光雷達(dá)SLAM,容易受到暴雨、灰塵等環(huán)境影響,同時(shí),在開闊地方應(yīng)用也受限,因?yàn)闊o明顯特征點(diǎn)而無法進(jìn)行定位。
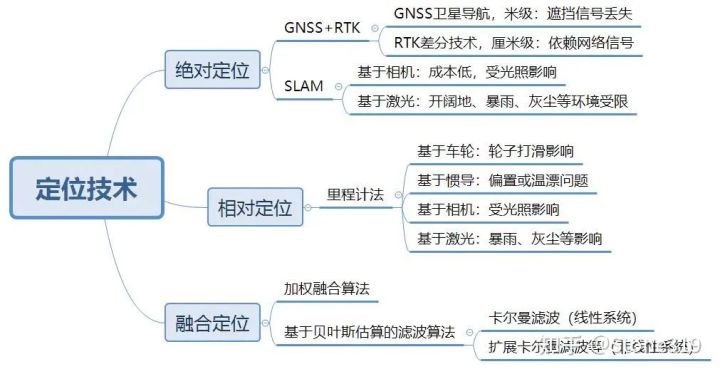
定位算法分類
3.3 規(guī)控算法
規(guī)劃、控制目的,一是對(duì)車輛運(yùn)動(dòng)進(jìn)行全局規(guī)劃(從地點(diǎn)A到地點(diǎn)B運(yùn)行路線)、行為決策(判斷變道還是超車等)、局部規(guī)劃(規(guī)劃局部行駛軌跡,規(guī)避障礙物等);二是,精準(zhǔn)控制車輛按規(guī)劃軌跡行駛。
全局路徑規(guī)劃、局部軌跡規(guī)劃,本質(zhì)上就是搜索最佳路徑。常用的搜索算法為A*算法,考慮節(jié)點(diǎn)到起點(diǎn)和終點(diǎn)最短距離作為優(yōu)先級(jí)。軌跡和路徑本質(zhì)區(qū)別是軌跡考慮了時(shí)間維度,在軌跡生成時(shí)考慮障礙物規(guī)避和控制約束,構(gòu)建損失函數(shù),進(jìn)行最優(yōu)行駛軌跡選擇。
控制算法,最常用的是經(jīng)典控制算法PID控制。對(duì)車輛橫向控制,一般采用簡(jiǎn)化的二輪自行車運(yùn)行學(xué)模型,通過純跟蹤控制-同人類駕駛向前看,選取預(yù)瞄點(diǎn)。
為了更精準(zhǔn)的控制,提高控制魯棒性,也有采用車輛運(yùn)動(dòng)學(xué)模型進(jìn)行控制,甚至采用橫縱向協(xié)同控制算法-MPC模型預(yù)測(cè)控制。
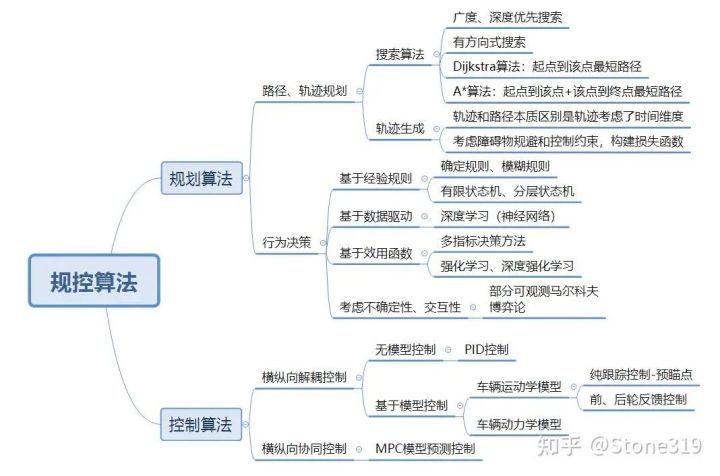
規(guī)控算法分類
04、交互技術(shù)
傳統(tǒng)汽車交互,在車內(nèi),駕駛員通過油門、剎車踏板、換檔手柄等給車輛輸入駕駛意圖,通過物理按鈕或觸摸屏幕進(jìn)行車載系統(tǒng)控制。在車外,通過駕駛員手勢(shì)、喇叭等與行人等交互。
目前在車內(nèi),通過語音與車輛交互越來越普遍,手勢(shì)交互也越來越流行。在完全實(shí)現(xiàn)自動(dòng)駕駛前,為避免駕駛員因過多自動(dòng)控制而走心,駕駛員狀態(tài)監(jiān)控也廣泛應(yīng)用。
未來隨著自動(dòng)駕駛發(fā)展和交互技術(shù)提高,人們不用關(guān)注車外狀況,更多的享受在車內(nèi)時(shí)光,通過手勢(shì)、頭姿態(tài)控制車輛,甚至可通過腦電波獲取駕駛意圖來交互。
在車外,自動(dòng)駕駛車輛將直接與行人交互,如通過外部警示、燈條和屏幕交互燈,甚至通過人身上移動(dòng)設(shè)備與行人交互,以及通過V2X設(shè)備與交通系統(tǒng)交互等。
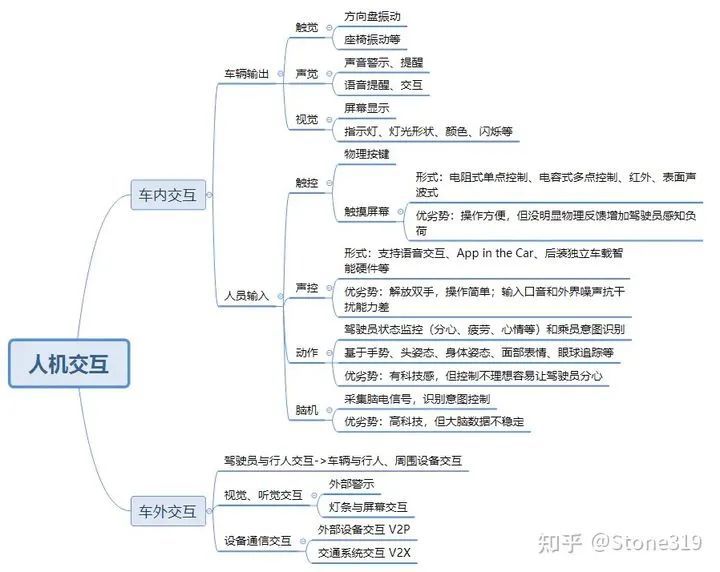
交互技術(shù)分類
05、安全技術(shù)
發(fā)展自動(dòng)駕駛技術(shù),提高交通安全,避免交通事故是主要目的之一。所以保證自動(dòng)駕駛系統(tǒng)安全技術(shù)尤為重要。
安全技術(shù)有兩個(gè)維度,一是安全設(shè)計(jì),保證自動(dòng)駕駛系統(tǒng)設(shè)計(jì)開發(fā)時(shí)充分考慮安全;二是安全驗(yàn)證,通過各自驗(yàn)證技術(shù)和方法,對(duì)自動(dòng)駕駛系統(tǒng)充分驗(yàn)證,保證可靠性。
安全設(shè)計(jì)一般分為:避免電子電氣系統(tǒng)失效對(duì)人員危害的功能安全設(shè)計(jì);避免因功能不足、人員誤用等對(duì)人員危害的預(yù)期功能安全設(shè)計(jì);避免因系統(tǒng)被侵入、攻擊,保證車內(nèi)外系統(tǒng)通信物理和邏輯安全的信息安全設(shè)計(jì);通過數(shù)學(xué)方法來界定“安全狀態(tài)”的責(zé)任敏感安全等。
安全驗(yàn)證一般分為:虛擬仿真和實(shí)車驗(yàn)證。虛擬仿真,根據(jù)驗(yàn)證仿真的內(nèi)容和階段不同,包括模型在環(huán)測(cè)試MIL、軟件在環(huán)測(cè)試SIL、處理器在環(huán)測(cè)試PIL、硬件在環(huán)測(cè)試HIL等。實(shí)車驗(yàn)證,可分為封閉道路測(cè)試、示范區(qū)測(cè)試和公開道路測(cè)試。
自動(dòng)駕駛汽車,相對(duì)于傳統(tǒng)車輛,驗(yàn)證成指數(shù)級(jí)增加。都依靠實(shí)車測(cè)試,從時(shí)間上和成本上都不現(xiàn)實(shí),進(jìn)行充分的仿真測(cè)試非常關(guān)鍵。

安全技術(shù)分類
06、寫在后面
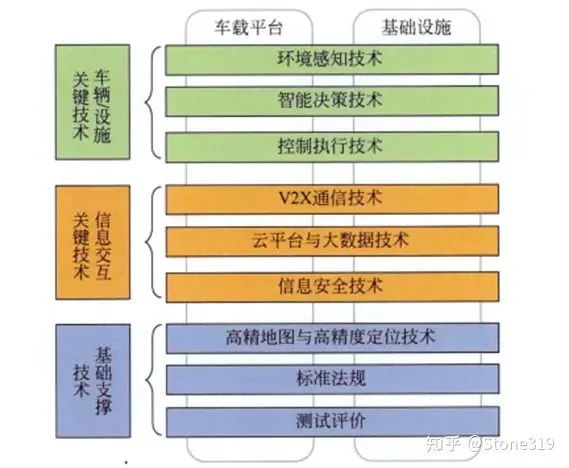
上述提到的自動(dòng)駕駛技術(shù),更多的從單車智能角度展開。作為未來發(fā)展一大爆發(fā)點(diǎn)-智能汽車,未來發(fā)展方向包括自動(dòng)化和網(wǎng)聯(lián)化兩個(gè)方面。
智能汽車關(guān)鍵技術(shù),可總結(jié)為“三橫“和“兩縱”。
“三橫”指車輛/設(shè)備技術(shù)、信息交互技術(shù)和基礎(chǔ)支撐技術(shù);“兩縱”指車載平臺(tái)和基礎(chǔ)設(shè)施建設(shè)。
車輛/設(shè)施技術(shù)包括:環(huán)境感知技術(shù)、智能決策技術(shù)和控制執(zhí)行技術(shù)等。
信息交互技術(shù)包括:V2X通信技術(shù)、云平臺(tái)與大數(shù)據(jù)技術(shù)、信息安全技術(shù)等。
基礎(chǔ)支撐技術(shù)包括:高精度地圖與高精度定位技術(shù)、標(biāo)準(zhǔn)法規(guī)和測(cè)試評(píng)價(jià)技術(shù)等。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 65



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
