




 廣告
廣告





















































具有均衡收斂速度的改進(jìn)FxLMS算法在動(dòng)力總成噪聲主動(dòng)控制中的應(yīng)用
2021-10-29 20:18:45· 來(lái)源:AutoAero

摘要 當(dāng)前的動(dòng)力傳動(dòng)系統(tǒng)主動(dòng)噪聲控制(ANC)系統(tǒng)不足以跟蹤快速的發(fā)動(dòng)機(jī)轉(zhuǎn)速變化,并且不能為單個(gè)發(fā)動(dòng)機(jī)提供一致的收斂速度,從而在較寬的頻率范圍內(nèi)實(shí)現(xiàn)平衡的
摘要
當(dāng)前的動(dòng)力傳動(dòng)系統(tǒng)主動(dòng)噪聲控制(ANC)系統(tǒng)不足以跟蹤快速的發(fā)動(dòng)機(jī)轉(zhuǎn)速變化,并且不能為單個(gè)發(fā)動(dòng)機(jī)提供一致的收斂速度,從而在較寬的頻率范圍內(nèi)實(shí)現(xiàn)平衡的降噪性能。這是因?yàn)榇蠖鄶?shù)ANC系統(tǒng)配置有標(biāo)準(zhǔn)的濾波x最小均方(FxLMS)算法,由于次級(jí)路徑模型的存在,該算法在頻率相關(guān)的收斂行為中具有固有的局限性(從控制揚(yáng)聲器輸入到監(jiān)測(cè)誤差麥克風(fēng)輸出的電聲路徑)在參考信號(hào)路徑中。本文首先概述了幾種最近改進(jìn)的FxLMS算法,以提高諧波響應(yīng)的收斂速度,如特征值均衡FxLMS(EE-FxLMS)然后,提出了一種改進(jìn)的FxLMS算法,稱為逆模型LMS(IMLMS)算法,作為主動(dòng)傳動(dòng)系噪聲控制的基礎(chǔ)。該算法通過(guò)利用次級(jí)路徑的逆模型實(shí)現(xiàn),在自適應(yīng)濾波器輸出端級(jí)聯(lián)或加入?yún)⒖夹盘?hào)發(fā)生器,以最小化其動(dòng)態(tài)對(duì)算法收斂性的影響。驗(yàn)證為了驗(yàn)證該算法的有效性,還對(duì)實(shí)測(cè)的動(dòng)力總成噪聲響應(yīng)進(jìn)行了數(shù)值模擬。結(jié)果表明,在單個(gè)發(fā)動(dòng)機(jī)階數(shù)下,收斂速度相當(dāng),在較寬的發(fā)動(dòng)機(jī)轉(zhuǎn)速范圍內(nèi),噪聲明顯降低。
1 引言
在過(guò)去的二十年中,有源噪聲控制(ANC)技術(shù)得到了廣泛的研究和發(fā)展。最近,這項(xiàng)技術(shù)的商業(yè)化已經(jīng)發(fā)展并擴(kuò)展到許多工業(yè)噪聲控制應(yīng)用領(lǐng)域。特別是,在過(guò)去五年中,一些主要原始設(shè)備制造商發(fā)布了許多帶有內(nèi)置ANC模塊的車型。這背后的一個(gè)主要情況是,ANC解決方案是傳統(tǒng)被動(dòng)噪聲控制(PNC)方法的有效替代方案,特別是對(duì)于降低低頻動(dòng)力傳動(dòng)系統(tǒng)和道路噪聲。ANC的基本思想是驅(qū)動(dòng)多個(gè)執(zhí)行器(揚(yáng)聲器),以產(chǎn)生與車輛產(chǎn)生的噪聲不同步的聲音,從而通過(guò)破壞性干擾對(duì)其進(jìn)行衰減。該技術(shù)利用了發(fā)動(dòng)機(jī)和道路噪聲的聲波傳播特性,在中低頻(長(zhǎng)波)噪聲控制方面具有獨(dú)特的優(yōu)勢(shì)。此外,它提供了一種動(dòng)態(tài)調(diào)整聲譜的有效方法,而不是簡(jiǎn)單地抑制聲壓級(jí)以獲得更好的音質(zhì)。因此,它在學(xué)術(shù)界和工業(yè)界都是一個(gè)很有吸引力的話題。
公開(kāi)文獻(xiàn)中報(bào)告了大量關(guān)于車輛內(nèi)部噪聲ANC的研究,如動(dòng)力傳動(dòng)系統(tǒng)相關(guān)噪聲和道路噪聲。這些應(yīng)用主要用于封閉空間,如車輛內(nèi)部駕駛室。此外,ANC已應(yīng)用于車輛外部排氣噪聲的衰減。多篇研究論文都提出了主動(dòng)消聲器的概念。例如,Ziegler和Gardner就發(fā)動(dòng)機(jī)排氣管有源消聲系統(tǒng)的設(shè)計(jì)獲得了早期專利。他們的控制系統(tǒng)采用前饋控制,與發(fā)動(dòng)機(jī)轉(zhuǎn)速同步,單位為每分鐘轉(zhuǎn)數(shù)(rpm)。盡管上述報(bào)告成功實(shí)施了ANC以改善整體NVH(噪音、振動(dòng)和不平順性)性能,但當(dāng)前的動(dòng)力傳動(dòng)系A(chǔ)NC系統(tǒng)可能不足以為單個(gè)發(fā)動(dòng)機(jī)提供一致的收斂速度,也不足以跟蹤快速的發(fā)動(dòng)機(jī)轉(zhuǎn)速變化。這是因?yàn)檫@些ANC系統(tǒng)中的大多數(shù)是通過(guò)采用標(biāo)準(zhǔn)濾波x最小均方(FxLMS)算法的自適應(yīng)濾波器實(shí)現(xiàn)的,由于濾波后參考信號(hào)自相關(guān)矩陣的特征值擴(kuò)展,尤其是在存在二次路徑模型的情況下,它表現(xiàn)出與頻率相關(guān)的收斂行為。本文將回顧ANC系統(tǒng)設(shè)計(jì)和算法開(kāi)發(fā)的最新進(jìn)展,以及它們?cè)趧?dòng)力傳動(dòng)系噪聲控制中的潛在應(yīng)用,以便進(jìn)一步了解ANC在車輛上的性能。此外,還利用實(shí)測(cè)的動(dòng)力總成噪聲響應(yīng)進(jìn)行了數(shù)值仿真,以證明所提出算法(IMLMS)的有效性。結(jié)果表明,在較寬的發(fā)動(dòng)機(jī)轉(zhuǎn)速范圍內(nèi),收斂速度明顯提高,噪聲明顯降低。
2 改進(jìn)算法的控制器
2.1 FxLMS算法
如圖1所示,通用單通道前饋ANC系統(tǒng)由一個(gè)帶有通用FxLMS算法的自適應(yīng)數(shù)字濾波器實(shí)現(xiàn)。這里,x(n)是參考信號(hào)(即轉(zhuǎn)速表信號(hào)產(chǎn)生的正弦信號(hào)),d(n)是主要噪聲(即動(dòng)力總成噪聲),e(n)是主要噪聲和次要抵消噪聲疊加后的誤差信號(hào)。FxLMS算法使用參考信號(hào)x(n)自適應(yīng)地生成二次噪聲,二次噪聲由誤差信號(hào)e(n)調(diào)整。參考信號(hào)x(n)基于發(fā)動(dòng)機(jī)轉(zhuǎn)速進(jìn)行內(nèi)部合成,發(fā)動(dòng)機(jī)轉(zhuǎn)速可根據(jù)轉(zhuǎn)速表脈沖序列信號(hào)進(jìn)行估計(jì)。這可以表示為:

其中,n是時(shí)間指數(shù),i是發(fā)動(dòng)機(jī)順序指數(shù),fi=iv/60是第i階的頻率,v是發(fā)動(dòng)機(jī)轉(zhuǎn)速,單位為rpm(每分鐘轉(zhuǎn)數(shù)),F(xiàn)s是采樣率。在使用FxLMS算法的傳統(tǒng)系統(tǒng)中,x(n)需要通過(guò)二次路徑模型進(jìn)行濾波,該模型將控制揚(yáng)聲器輸入信號(hào)的動(dòng)態(tài)行為與誤差傳聲器相關(guān)聯(lián),以補(bǔ)償實(shí)際二次路徑S(z)產(chǎn)生的相位延遲和幅度響應(yīng)。在激活A(yù)NC系統(tǒng)之前,通常使用離線系統(tǒng)識(shí)別方法來(lái)估計(jì)此二次路徑模型。FxLMS算法可概括為:
其中n是時(shí)間指數(shù),S是次路徑的脈沖響應(yīng),*表示自適應(yīng)濾波器輸出與次路徑的線性卷積,并且控制器的濾波器權(quán)重和參考信號(hào)向量為

在式(4)中,µ是收斂步長(zhǎng),它決定了FxLMS算法的收斂速度和穩(wěn)定性,L是自適應(yīng)濾波器的階數(shù)。收斂速度由濾波參考信號(hào)向量自相關(guān)矩陣的特征值擴(kuò)展決定。正如所注意到的,動(dòng)力系統(tǒng)噪聲頻譜通常由諧波控制,諧波分布在不同發(fā)動(dòng)機(jī)轉(zhuǎn)速的大頻率范圍內(nèi)。此外,次級(jí)路徑的頻率響應(yīng)是變化的。因此,由于頻率相關(guān)的收斂行為,將標(biāo)準(zhǔn)FxLMS算法應(yīng)用于動(dòng)力總成ANC可能存在固有的性能限制。在下一節(jié)中,將回顧和討論幾種改進(jìn)的FxLMS算法,以提高控制性能。

圖1 使用FxLMS的動(dòng)力總成ANC系統(tǒng)控制圖
2.2 EE-FxLMS算法
Thomas等人提出了一種特征值均衡FxLMS(EE FxLMS)算法,該算法通過(guò)在保持相位不變的情況下展平二次路徑模型的幅度響應(yīng)來(lái)工作。通過(guò)FFT和歸一化估計(jì)的二次路徑模型中每個(gè)頻率單元的幅度,可以簡(jiǎn)單地實(shí)現(xiàn)幅度均衡。然后,Sun等人將該算法應(yīng)用于車輛動(dòng)力總成噪聲控制,控制圖如圖2所示。Duan等人擴(kuò)展了類似的想法,以平衡不同控制通道之間的幅度差異。
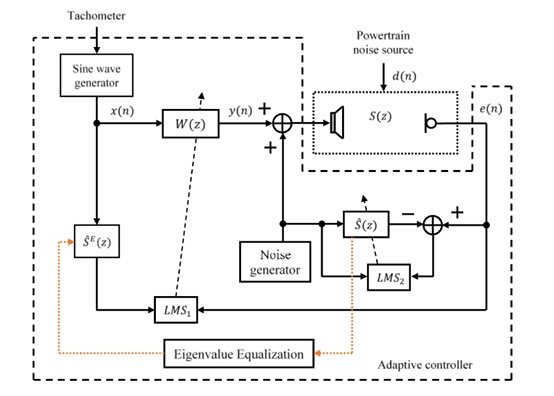
圖2 使用EE-FxLMS的動(dòng)力總成ANC系統(tǒng)控制圖
2.3 NX-LMS算法
為了進(jìn)一步處理諧波響應(yīng)修正FxLMS算法的頻率依賴收斂性,Oliveira提出了一種NX-LMS算法,通過(guò)在參考信號(hào)路徑中添加單個(gè)諧波頻率的歸一化濾波器。圖3顯示了采用NX-LMS算法的ANC系統(tǒng)對(duì)車輛動(dòng)力傳動(dòng)系統(tǒng)噪聲的檢測(cè)。在參考信號(hào)發(fā)生器之后添加歸一化濾波器N(ω)=1/?(ω),以調(diào)諧每個(gè)正弦信號(hào)的幅度;因此,不僅在每個(gè)諧波參考處的振幅變化被均衡,而且相位延遲對(duì)收斂性能的影響被最小化。作者還將NX-LMS算法與有源噪聲均衡器方案相結(jié)合,將該算法擴(kuò)展到車輛動(dòng)力總成噪聲的有源音質(zhì)控制系統(tǒng)中。
2.4 IMLMS算法
另一項(xiàng)最近的研究進(jìn)一步消除動(dòng)力傳動(dòng)系統(tǒng)噪聲控制濾波-x型算法的頻率依賴收斂性,即逆模型LMS(IMLMS)算法,如圖4所示。IMLMS算法的理想是通過(guò)在控制濾波器的輸出端添加二次路徑的逆模型來(lái)同時(shí)補(bǔ)償相位延遲和幅度。通常,在寬帶頻率范圍內(nèi)很難找到非最小相位系統(tǒng)的逆模型。然而,諧波響應(yīng)存在逆模型;圖4所示的系數(shù)A和B用于表示單個(gè)頻率下的反向響應(yīng)。這里,僅應(yīng)用LMS算法來(lái)更新控制濾波器參數(shù)。因此,在每個(gè)諧波頻率下的性能更為最優(yōu),因?yàn)樵诒3炙蓄l率分量的參考信號(hào)功率相同時(shí),收斂速度是最優(yōu)的。此外,由于在參考信號(hào)路徑中沒(méi)有卷積操作,因此計(jì)算成本降低。然后將IMLMS算法的濾波器權(quán)值更新方程歸納為
其中y′(n)是二次抵消波,常數(shù)A和B與諧波頻率下逆二次路徑模型的項(xiàng)Re和Im有關(guān)。需要注意的是,IMLMS算法的收斂速度僅取決于正弦參考信號(hào)的功率,因此對(duì)于各種諧波都能產(chǎn)生平衡的控制性能。圖4中IMLMS算法的實(shí)現(xiàn)是使用兩個(gè)具有一定長(zhǎng)度(大于2)的自適應(yīng)濾波器來(lái)構(gòu)造正弦和余弦項(xiàng)的組合。該算法的一個(gè)有效實(shí)現(xiàn)也可并入自適應(yīng)陷波濾波器,其中參考向量的正交特性將保證在單個(gè)諧波上的均衡收斂特性。此外,逆模型的實(shí)現(xiàn)可以放在自適應(yīng)濾波器的前面或后面。
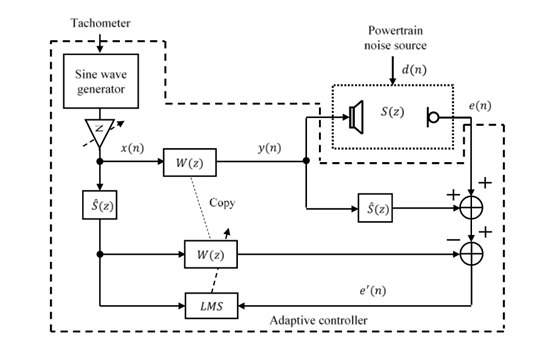
圖3 使用NX-LMS的動(dòng)力總成ANC系統(tǒng)控制圖
3 數(shù)值模擬
本節(jié)將在數(shù)值環(huán)境中研究采用改進(jìn)算法的單輸入單輸出(SISO)動(dòng)力傳動(dòng)系統(tǒng)控制系統(tǒng)。為了便于演示,比較了FxLMS、EE-FxLMS和IMLMS算法的性能。在這些模擬中,使用V6發(fā)動(dòng)機(jī)的道路車輛在不同轉(zhuǎn)速下記錄主要?jiǎng)恿偝蓴_動(dòng)和轉(zhuǎn)速表信號(hào)。本研究考慮了兩種情況:一種是發(fā)動(dòng)機(jī)在3500 rpm左右旋轉(zhuǎn),另一種是在10秒內(nèi)從1000 rpm到5000 rpm的速度掃描。利用發(fā)動(dòng)機(jī)曲軸的基本轉(zhuǎn)速合成余弦波參考信號(hào)。ANC系統(tǒng)旨在盡可能衰減駕駛員和乘客頭部位置周圍的主要發(fā)動(dòng)機(jī)順序噪音。這里是引擎訂單1.5,2. 0, 2. 5和3.0用于分析。監(jiān)控錯(cuò)誤麥克風(fēng)位于駕駛室天花板上方的頭部。采用離線系統(tǒng)辨識(shí)方法,通過(guò)實(shí)驗(yàn)測(cè)量了從揚(yáng)聲器到誤差傳聲器的二次路徑的估計(jì)傳遞函數(shù)。本仿真中使用的二次路徑模型的頻率響應(yīng)函數(shù)如圖5所示。二次路徑模型表示為256階有限脈沖響應(yīng)(FIR)濾波器。通過(guò)對(duì)估計(jì)的脈沖響應(yīng)函數(shù)進(jìn)行傅里葉變換,可以確定相應(yīng)頻率的逆模型常數(shù)A和B。數(shù)據(jù)采集的采樣頻率為4096 Hz。
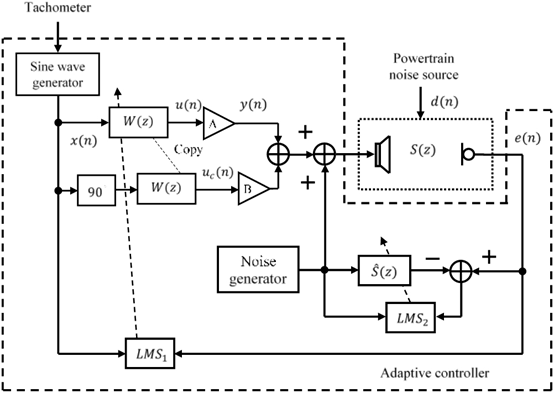
圖4 使用IMLMS的動(dòng)力總成ANC系統(tǒng)控制圖
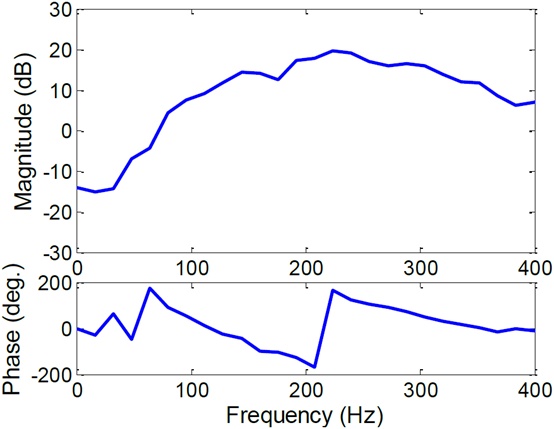
圖5 從控制揚(yáng)聲器到誤差麥克風(fēng)的次級(jí)路徑的頻率響應(yīng)函數(shù)
圖6顯示了使用各種自適應(yīng)算法的控制系統(tǒng)在情況1(3500 rpm的靜止轉(zhuǎn)速)下的性能比較。此處僅顯示了2級(jí)和3級(jí)發(fā)動(dòng)機(jī)的頻譜結(jié)果,以便于說(shuō)明。應(yīng)注意,不同發(fā)動(dòng)機(jī)階數(shù)下參考信號(hào)的振幅設(shè)置為統(tǒng)一。從圖6(a)和(b)中可以看出,傳統(tǒng)的FxLMS算法在第二階和第三階顯示出不平衡的控制性能,同時(shí)它可以在每個(gè)階產(chǎn)生與IMLMS算法相似的降噪效果。這是因?yàn)闉V波后的參考信號(hào)功率在對(duì)應(yīng)于2階的頻率處非常低,這需要較大的步長(zhǎng)以具有快速收斂性,同時(shí)顯著降低噪聲。相比之下,新開(kāi)發(fā)的IMLMS算法在這兩個(gè)頻率下表現(xiàn)出更平衡的性能,因?yàn)榇渭?jí)路徑動(dòng)態(tài)不會(huì)影響算法的收斂性。如圖7所示(包含圖6最后一秒鐘的時(shí)域控制結(jié)果的頻譜),IMLMS算法在第二和第三階時(shí)分別降低了約20和25 dBA,在FxLMS算法中,可以采用基于各個(gè)頻率的二次路徑響應(yīng)幅度的參考信號(hào)幅度調(diào)整,以平衡階數(shù)2和3的步長(zhǎng)差異。然而,這種修改在實(shí)踐中相當(dāng)麻煩。

圖6 使用FxLMS、EE-FxLMS和IMLMS算法對(duì)3500 rpm下發(fā)動(dòng)機(jī)轉(zhuǎn)速的受控動(dòng)力系統(tǒng)響應(yīng)進(jìn)行比較:(a)第二級(jí)發(fā)動(dòng)機(jī)和(b)第三級(jí)發(fā)動(dòng)機(jī)。
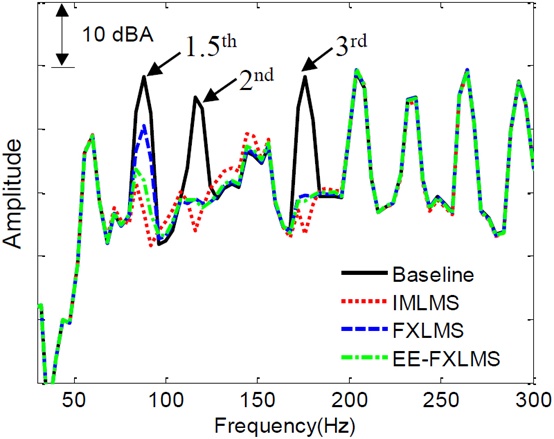
圖7 3500 rpm發(fā)動(dòng)機(jī)轉(zhuǎn)速下受控動(dòng)力系統(tǒng)響應(yīng)的頻譜比較(通過(guò)圖6中最后1s數(shù)據(jù)的FFT計(jì)算的頻譜)
在案例2中,考慮了發(fā)動(dòng)機(jī)轉(zhuǎn)速?gòu)?000轉(zhuǎn)/分到5000轉(zhuǎn)/分時(shí)的瞬態(tài)動(dòng)力傳動(dòng)系統(tǒng)噪聲。使用各種算法的控制結(jié)果如圖8所示。黑線表示無(wú)任何控制的基線響應(yīng),藍(lán)色虛線表示FxLMS算法的結(jié)果,綠色虛線表示EE FxLMS算法,紅色虛線表示IMLMS算法。類似地,傳統(tǒng)的FxLMS算法在發(fā)動(dòng)機(jī)階數(shù)為2時(shí)性能較差,在較低轉(zhuǎn)速時(shí)甚至存在嚴(yán)重的超調(diào)。這是因?yàn)轭l率相關(guān)的收斂行為要求在每個(gè)速度范圍內(nèi)有不同的步長(zhǎng),以保持系統(tǒng)的穩(wěn)定性。另一方面,EE-FxLMS算法稍微改善/減輕了單個(gè)頻率的收斂失配,但在不使兩種算法無(wú)效的情況下,兩種算法都可以在兩個(gè)引擎階數(shù)下產(chǎn)生一致的噪聲降低。此外,在較低頻率下避免了過(guò)沖問(wèn)題??偟膩?lái)說(shuō),與傳統(tǒng)的FxLMS算法相比,改進(jìn)后的算法可以產(chǎn)生相對(duì)更多的減少。需要指出的是,當(dāng)采用自適應(yīng)陷波濾波器時(shí),通過(guò)仔細(xì)的系統(tǒng)設(shè)計(jì),分別調(diào)整每個(gè)頻率的收斂步長(zhǎng),可以避免FxLMS算法性能的惡化。此外,每個(gè)諧波的參考信號(hào)功率可以通過(guò)參考文獻(xiàn)中所述的濾波二次路徑模型的功率進(jìn)行手動(dòng)調(diào)諧。這里的仿真研究證明了這些改進(jìn)算法的顯著特點(diǎn)。這將是我們未來(lái)的研究,以進(jìn)一步調(diào)查和比較它們?cè)谡鎸?shí)車輛上的有效性。
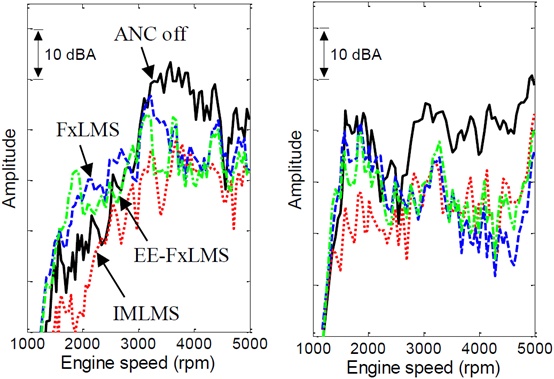
圖8 發(fā)動(dòng)機(jī)轉(zhuǎn)速在10秒內(nèi)從1000轉(zhuǎn)/分掃至5000轉(zhuǎn)/分時(shí),情況2受控動(dòng)力系統(tǒng)響應(yīng)的頻譜比較
4 總結(jié)
采用ANC技術(shù)解決低頻噪聲問(wèn)題在許多噪聲控制工程實(shí)踐中,特別是在汽車行業(yè)中,具有很大的應(yīng)用前景。這是因?yàn)锳NC在低頻范圍內(nèi)非常有效,而傳統(tǒng)的PNC方法往往與其他設(shè)計(jì)要求(如燃油效率)發(fā)生沖突。在這種情況下,ANC已被視為車輛NVH改進(jìn)的戰(zhàn)略解決方案,正如大型汽車公司發(fā)布的具有ANC功能的多個(gè)批量生產(chǎn)車型所注意到的那樣。為了進(jìn)一步了解當(dāng)前動(dòng)力總成ANC系統(tǒng)的功能,本文討論了幾種最新的高效自適應(yīng)控制算法。這些傳統(tǒng)FxLMS算法的改進(jìn)版本是專門開(kāi)發(fā)的,用于減少和/或消除單個(gè)發(fā)動(dòng)機(jī)階次下頻率相關(guān)的收斂行為(特別是由次級(jí)路徑模型引起的)。通過(guò)在自適應(yīng)濾波器的輸出處展平二次路徑的逆模型的幅值或補(bǔ)償相位響應(yīng),可在寬發(fā)動(dòng)機(jī)轉(zhuǎn)速范圍內(nèi)均衡收斂,這樣,動(dòng)力總成控制系統(tǒng)可以更好地跟蹤在不同工作條件下,隨著發(fā)動(dòng)機(jī)轉(zhuǎn)速變化而顯著變化的車內(nèi)噪聲特征的波動(dòng)。這些最新的研究成果也為發(fā)動(dòng)機(jī)響應(yīng)的主動(dòng)聲音設(shè)計(jì)提供了一個(gè)有希望的解決方案。
文章來(lái)源:Sun, G., Feng, T., Xu, J., Li, M. et al.,"Modified FxLMS Algorithm with Equalized Convergence Speed for ActiveControl of Powertrain Noise," SAE Int. J. Passeng. Cars - Mech. Syst.8(3):2015, doi:10.4271/2015-01-2217.
AutoAero是吉林大學(xué)張英朝教授團(tuán)隊(duì)建立的專業(yè)汽車空氣動(dòng)力學(xué)微信公眾號(hào)號(hào),致力于普及汽車空氣動(dòng)力學(xué)知識(shí),傳播汽車空氣動(dòng)力學(xué)。推廣包括流體力學(xué)基本理論,汽車空氣動(dòng)力學(xué)及熱管理水管理等基礎(chǔ)知識(shí),乘用車氣動(dòng)造型設(shè)計(jì),卡車氣動(dòng)造型設(shè)計(jì),風(fēng)洞實(shí)驗(yàn)技術(shù)等多方面的內(nèi)容。歡迎有興趣的專業(yè)人士閱讀、關(guān)注、共享!
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 56



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開(kāi)發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
