




 廣告
廣告





















































新能源汽車遠(yuǎn)程遙控泊車上電設(shè)計
2021-11-08 21:45:45· 來源:電動學(xué)堂 作者:鄭舒懿等

文章來源:上汽通用五菱汽車股份有限公司技術(shù)中心1引言目前市面上的大部分電動汽車接收到手機(jī)端發(fā)送的遠(yuǎn)程遙控泊車指令后,在上電認(rèn)證時只經(jīng)過整車控制器和車內(nèi)
文章來源:上汽通用五菱汽車股份有限公司技術(shù)中心
1引言
目前市面上的大部分電動汽車接收到手機(jī)端發(fā)送的遠(yuǎn)程遙控泊車指令后,在上電認(rèn)證時只經(jīng)過整車控制器和車內(nèi)一鍵式啟動控制器(以下簡稱PEPS)的一次鑒權(quán)后就可以跳轉(zhuǎn)到動力準(zhǔn)備狀態(tài)。僅有一次鑒權(quán),上電的安全性比較低,且在上電前沒有判斷SOC值、充電線等因素,存在啟動失敗及安全隱患。
本文提出一種在遠(yuǎn)程遙控泊車上電過程中不同控制器之間采用雙重鑒權(quán)及上電前對SOC值、充電線連接狀態(tài)的判斷的策略,使用戶在使用手機(jī)遠(yuǎn)程遙控泊車上電時的安全性得到一定保障。
2現(xiàn)有技術(shù)分析
現(xiàn)有遠(yuǎn)程遙控泊車上電邏輯是由車載終端、整車控制器、手機(jī)APP、PEPS控制器及相關(guān)線束完成。
車載終端接收到手機(jī)APP發(fā)送的遙控泊車指令后,通過CAN網(wǎng)絡(luò)發(fā)送給PEPS控制器,PEPS控制器接收到信號后通過內(nèi)部邏輯判斷使整車電源模式由OFF跳轉(zhuǎn)到ON并與整車控制器進(jìn)行防盜鑒權(quán),通過鑒權(quán)后,整車控制器控制繼電器閉合,整車進(jìn)入動力準(zhǔn)備狀態(tài)
該技術(shù)目前的局限在于:
車載終端接收到遠(yuǎn)程遙控泊車信號以后,CAN信號傳遞的過程中,只有控制器與整車控制器之間一次防盜鑒權(quán),安全性較低;
無上電前SOC值判斷,若電量過低時進(jìn)行遠(yuǎn)程遙控泊車,容易出現(xiàn)泊車進(jìn)行時車輛因SOC過低而熄火無法啟動;
無上電前整車防盜模式和充電線是否連接判斷,導(dǎo)致進(jìn)行遠(yuǎn)程遙控泊車時存在一定安全隱患。
3系統(tǒng)設(shè)計
3.1系統(tǒng)概述
本文介紹的遠(yuǎn)程遙控泊車上電邏輯涉及的主要有整車控制器、車載終端、智能進(jìn)入系統(tǒng)控制器、手機(jī)APP四個部分。接收到遠(yuǎn)程信號后,智能進(jìn)入系統(tǒng)控制器判斷實際車況后與其他控制器進(jìn)行雙重鑒權(quán),使遠(yuǎn)程遙控泊車上電過程更加安全可靠。
3.2系統(tǒng)架構(gòu)設(shè)計
遠(yuǎn)程遙控泊車上電邏輯涉及的主要有整車控制器、車載終端、智能進(jìn)入系統(tǒng)控制器、手機(jī)APP四個部分,具體框圖如圖1所示。
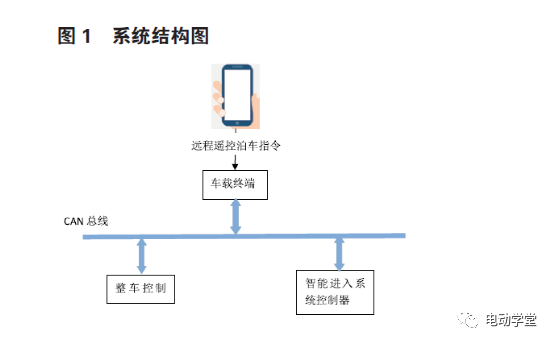
整車控制器,是整個汽車的核心控制部件,相當(dāng)于汽車的大腦。它采集加速踏板信號、制動踏板信號及其他部件信號,并做出相應(yīng)判斷后,控制下層的各部件控制器的動作,驅(qū)動汽車正常行駛。作為汽車的指揮管理中心,整車控制器主要功能包括:驅(qū)動力矩控制、制動能量的優(yōu)化控制、整車的能量管理、CAN網(wǎng)絡(luò)的維護(hù)和管理、故障的診斷和處理、車輛狀態(tài)監(jiān)視等,它起著控制車輛運行的作用。
智能進(jìn)入系統(tǒng)控制器,是核心控制單元。當(dāng)接收到合法的遠(yuǎn)程遙控泊車上電請求時控制整車電源模式由OFF擋跳轉(zhuǎn)到ON擋,支持LIN總線控制ESCL(電子轉(zhuǎn)向柱鎖)解閉鎖。
車載終端,是接收手機(jī)APP遠(yuǎn)程信號的控制器,實現(xiàn)手機(jī)APP與車輛之間的信息顯示與控制。
手機(jī)APP是用戶實現(xiàn)與車輛進(jìn)行遠(yuǎn)程信息交互并由此來遠(yuǎn)程控制車輛的一種途徑。
3.3系統(tǒng)工作原理
本策略中,整車使用智能進(jìn)入系統(tǒng)控制器替換PEPS控制器與車身控制模塊,由智能進(jìn)入系統(tǒng)控制器控制整車上下電策略的執(zhí)行。
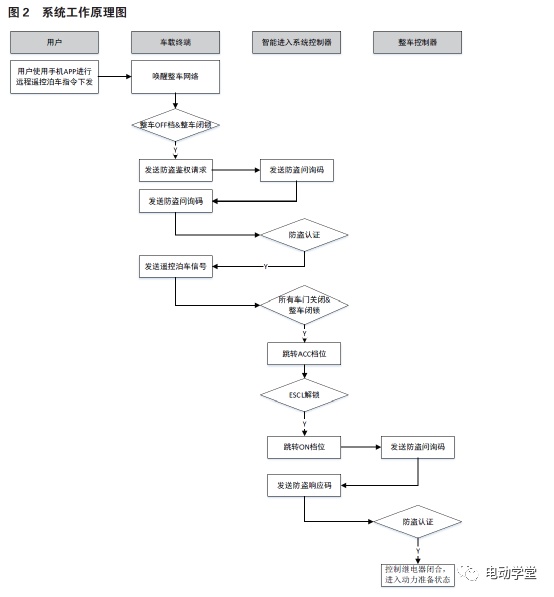
1、車載終端接收到手機(jī)APP遠(yuǎn)程遙控泊車指令后,喚醒整車網(wǎng)絡(luò)并判斷整車上電條件,然后向智能進(jìn)入系統(tǒng)控制器發(fā)送防盜鑒權(quán)請求,智能進(jìn)入系統(tǒng)控制器發(fā)送防盜問詢碼給車載終端,車載終端回應(yīng)防盜響應(yīng)碼。
2、鑒權(quán)認(rèn)證通過后,車載終端將遠(yuǎn)程遙控泊車信號通過CAN網(wǎng)絡(luò)發(fā)送給智能進(jìn)入系統(tǒng)控制器,智能進(jìn)入系統(tǒng)控制器判斷整車上電條件符合后,整車電源模式跳轉(zhuǎn)到ACC檔位,且智能進(jìn)入系統(tǒng)控制器進(jìn)入遙控上電模式,同時ESCL解鎖,整車電源模式跳轉(zhuǎn)到ON檔;
3、整車控制器檢測到ON檔信號后向智能進(jìn)入控制器發(fā)送防盜詢問碼,智能進(jìn)入系統(tǒng)控制器回應(yīng)防盜響應(yīng)碼,鑒權(quán)請求認(rèn)證通過后,整車控制器控制繼電器閉合,整車進(jìn)入動力準(zhǔn)備狀態(tài)(圖2)。
4技術(shù)創(chuàng)新點
與市面上現(xiàn)有技術(shù)相比,本文涉及的邏輯方案有以下技術(shù)創(chuàng)新點:
1、車載終端與智能進(jìn)入系統(tǒng)控制器之間增加防盜鑒權(quán)認(rèn)證步驟,實現(xiàn)遠(yuǎn)程遙控泊車上電流程雙重鑒權(quán),提高遠(yuǎn)程遙控泊車上電邏輯的可靠性;
2、遠(yuǎn)程遙控泊車上電前增加整車SOC值判斷;
3、遠(yuǎn)程遙控泊車上電前增加整車防盜模式及充電線連接判斷。
5結(jié)束語
通過增加控制器之間的鑒權(quán)步驟及上電前對車輛點亮、充電線連接情況等車況的判斷,使用戶在使用遠(yuǎn)程遙控泊車功能時更有安全保障,提升用戶的功能使用體驗感。



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
