




 廣告
廣告





















































EPB卡鉗EOL性能在線測試系統(tǒng)
2021-11-16 10:15:46· 來源:汽車制動之家

摘要: 針對目前電子駐車系統(tǒng)EPB(electrical parking brake)的執(zhí)行部件EPB卡鉗的EOL(end of line)性能在線測試方法不夠完善的現(xiàn)狀,引入計算機(jī)控制、高精度數(shù)據(jù)
摘要: 針對目前電子駐車系統(tǒng)EPB(electrical parking brake)的執(zhí)行部件EPB卡鉗的EOL(end of line)性能在線測試方法不夠完善的現(xiàn)狀,引入計算機(jī)控制、高精度數(shù)據(jù)采集、MSA測量系統(tǒng)分析等技術(shù),設(shè)計具有快速正反轉(zhuǎn)切換且防過沖功能的測試電路以及模擬EPB卡鉗駐車制動機(jī)構(gòu),研制一套EPB卡鉗EOL性能在線測試系統(tǒng),利用特征點(diǎn)處理算法對測試數(shù)據(jù)處理,實(shí)現(xiàn)對EPB卡鉗電流、力值特性的檢測和評估,并對系統(tǒng)重復(fù)性和不確定度進(jìn)行評定,測量能力指數(shù)均大于1.33,評定結(jié)果均符合相關(guān)標(biāo)準(zhǔn)。
1 EPB卡鉗工作原理與EOL測試需求分析
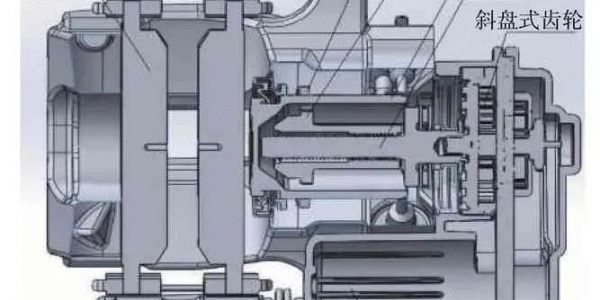
系統(tǒng)針對電機(jī)集成式EPB卡鉗的EOL性能檢測展開研究。集成式EPB卡鉗取消了拉索機(jī)構(gòu),將電機(jī)集成在制動卡鉗上,其主要結(jié)構(gòu)分為3部分:直流電機(jī)、減速機(jī)構(gòu)和鉗體總成。EPB卡鉗工作原理如下:
如圖1所示,施加駐車制動時,控制單元接收駐車制動信號,響應(yīng)并輸出控制壓力啟動電機(jī),電機(jī)通過減速機(jī)構(gòu)傳導(dǎo)的力傳動螺桿,螺桿轉(zhuǎn)動使得壓力螺母向前直線運(yùn)動,從而作用到制動活塞上,制動活塞再推動右制動蹄片擠壓制動盤,達(dá)到駐車制動效果。

圖1 施加駐車卡鉗狀態(tài)示意圖
駐車制動過程中有以下待測試項:1)加駐啟動峰值電流:即電機(jī)啟動瞬間最大電流值;2)加駐空載電流:制動活塞接觸到制動摩擦片之前的行程稱為空載行程,此過程的電流即為加駐空載電流;3)加駐力:當(dāng)施加到制動盤制動力達(dá)到設(shè)定范圍時的力;4)加駐電流:加駐力點(diǎn)的電流值;5)加駐時間:當(dāng)制動活塞接觸到制動摩擦片時到施加制動力達(dá)到設(shè)定值的時間。
解除駐車制動時,電機(jī)反轉(zhuǎn)帶動壓力螺母退回時,壓力螺母并不會帶動制動活塞移動,而是與制動活塞分離。制動活塞的回位依靠的是密封圈的復(fù)位作用完成的。正常的制動活塞移動時,位移是非常小的,在密封圈的形變范圍之內(nèi),因此在解除制動時,密封圈的形變恢復(fù)力拉動制動活塞退回。
解除駐車制動過程中有以下待測項:1)解駐啟動峰值電流:電機(jī)反轉(zhuǎn)啟動瞬間的最大電流值;2)解駐空載電流:當(dāng)制動活塞與制動摩擦片分離時稱為解駐空載過程,此時電流稱為解駐空載電流。
根據(jù)客戶測試指導(dǎo)要求上述測試特征指標(biāo)合格標(biāo)準(zhǔn)如表1所示,圖2所示為客戶提供標(biāo)準(zhǔn)EOL性能曲線。
2 測試方案設(shè)計
2.1 性能測試方法及系統(tǒng)方案設(shè)計
參考QCT592—2013《液壓制動鉗總成性能要求及臺架試驗方法》標(biāo)準(zhǔn),并結(jié)合企業(yè)測試指導(dǎo)需求,制定EPB卡鉗EOL性能測試方法,結(jié)合EOL響應(yīng)的3個過程,設(shè)計測試方案如下:根據(jù)EPB卡鉗的工作原理和性能測試需求分析,進(jìn)行系統(tǒng)整體設(shè)計,整體系統(tǒng)由功能硬件模塊、測試軟件、上位機(jī)控制系統(tǒng)等模塊構(gòu)成。
表1 性能測試參數(shù)合格標(biāo)準(zhǔn)

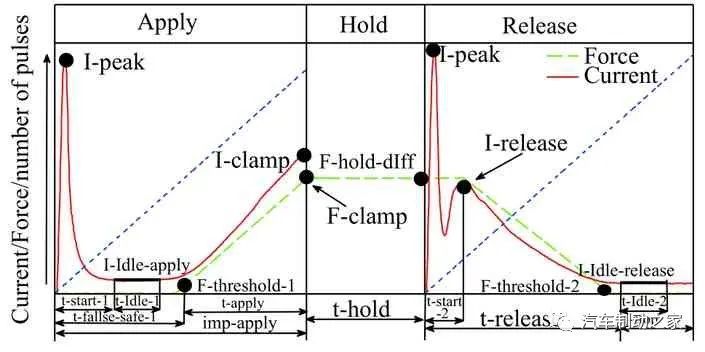
圖2 標(biāo)準(zhǔn)EOL性能曲線
2.2 系統(tǒng)硬件模塊設(shè)計
系統(tǒng)硬件基于模塊化設(shè)計思路,以工控計算機(jī)為載體,按功能定義劃分為數(shù)據(jù)采集與信號處理、下位機(jī)PLC模塊、機(jī)械臺架、電路設(shè)計等單元模塊。圖3為系統(tǒng)硬件功能模塊結(jié)構(gòu)圖。

圖3 系統(tǒng)硬件功能模塊結(jié)構(gòu)圖
2.2.1 數(shù)據(jù)采集處理模塊設(shè)計
為了滿足系統(tǒng)高速實(shí)時、高精度采樣的要求,系統(tǒng)使用研華科技高分辨率多功能數(shù)據(jù)采集卡PCI1716L進(jìn)行數(shù)據(jù)采集,采樣速率可達(dá)250 kS/s,用數(shù)據(jù)采集卡AI通道采集電壓、力傳感器和分流器的電壓信號;DI通道用于處理用戶操作和系統(tǒng)故障判斷;DO通道用于控制繼電器的動作。針對測試項目、測試量程、精度指標(biāo)等要求,選擇各路傳感器。采用差分式模擬量輸入接線方式,有效減少耦合到信號中的噪聲。
2.2.2 機(jī)械平臺設(shè)計
為了滿足在線測試要求,機(jī)械平臺主要由待測工件傳送機(jī)構(gòu)、工作平臺、模擬制動塊傳送機(jī)構(gòu)、待測卡鉗固定機(jī)構(gòu)組成。光電開關(guān)檢測到待測產(chǎn)品傳送機(jī)構(gòu)到位后將模擬制動塊向卡鉗固定位置相反的位置移動,然后傳送裝置的氣缸將卡鉗頂起至卡鉗固定機(jī)構(gòu)以固定卡鉗,然后將模擬制動塊傳送到位后通過模擬固定在模擬制動塊的力傳感器進(jìn)行卡鉗的性能檢測。圖4為本系統(tǒng)的機(jī)械平臺。
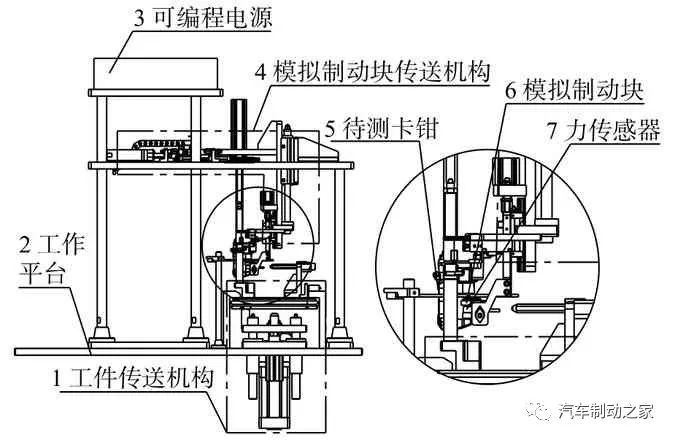
圖4 系統(tǒng)機(jī)械平臺
2.2.3 測試電路設(shè)計
為了解決測試過程中電機(jī)啟動瞬間電流值很大且要求采集頻率很高的問題,應(yīng)用微電阻設(shè)計分流器,通過數(shù)據(jù)采集卡實(shí)時采集微電阻兩端的電壓來計算電流值;為了模擬EPB卡鉗工作的加駐和解駐過程,利用功率繼電器實(shí)現(xiàn)正反轉(zhuǎn)切換;為了解決在加駐測試完成時斷開固態(tài)繼電器后電機(jī)短時間反轉(zhuǎn)產(chǎn)生的電流對電路造成的影響,通過續(xù)流二極管將電流續(xù)流到保護(hù)回路中。圖5所示為測試系統(tǒng)電路圖。
2.3 軟件設(shè)計與測試流程
根據(jù)測試過程,以LabVIEW為開發(fā)平臺,基于模塊化設(shè)計思路進(jìn)行軟件設(shè)計。根據(jù)功能定義,將數(shù)據(jù)采集處理、產(chǎn)品傳送與裝夾、測試數(shù)據(jù)溯源、參數(shù)管理等分裝成獨(dú)立VI,通過方法節(jié)點(diǎn)和狀態(tài)機(jī)根據(jù)測試流程動態(tài)載入功能模塊,實(shí)現(xiàn)性能測試。圖6為軟件測試流程圖。
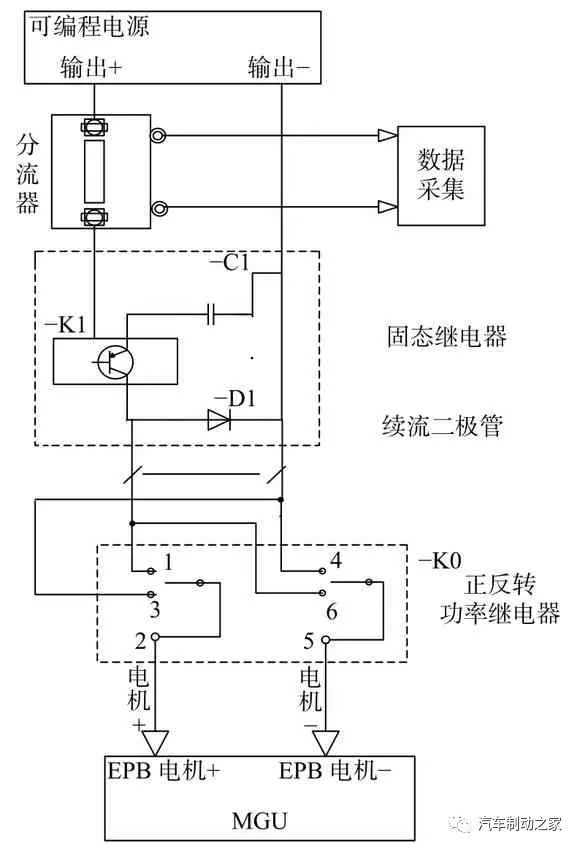
圖5 測試系統(tǒng)電路圖

圖6 軟件測試流程圖
將待測卡鉗放至測試工裝上,通過氣缸夾緊,在可編程電源上設(shè)定測試參數(shù),開啟高速采集程序,首先使電機(jī)正向加載,模擬EPB加駐過程。加駐電流達(dá)到預(yù)設(shè)值允許范圍時,加駐完成;等待1 s后,切換回路電流方向,使電機(jī)反向旋轉(zhuǎn)2 s,模擬EPB解駐過程,采集程序?qū)崟r采集加駐與解駐過程中各傳感器數(shù)據(jù),經(jīng)濾波、取特征點(diǎn)等處理后以曲線和表格形式顯示在測試界面上,并對測試結(jié)果進(jìn)行判斷后上傳至MES系統(tǒng),若測試結(jié)果不合格,則將其置于待返工工裝位,報警提示。若測試結(jié)果合格,將其置于合格產(chǎn)品傳輸帶,輸出測試報告。
3 測試結(jié)果及數(shù)據(jù)分析
3.1 性能測試實(shí)驗
性能測試前,設(shè)置各項測試參數(shù),如表2所示。
表2 EOL性能測試條件
完成測試條件設(shè)置,將待測產(chǎn)品放入安放工位,按下啟動按鈕進(jìn)入自動測試,采集所需測試數(shù)據(jù)并處理,得到測試曲線如圖7所示。

圖7 EOL性能測試曲線
利用閾值法提取EOL性能測試所需特征點(diǎn)結(jié)果如表3所示。
表3 EOL性能測試結(jié)果
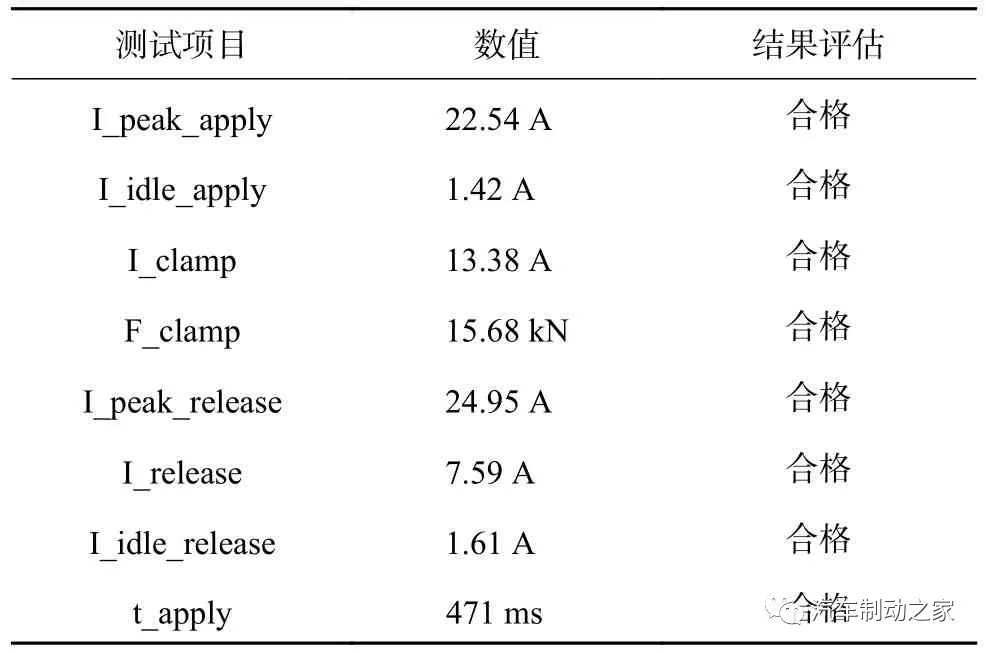
結(jié)果表明:系統(tǒng)功能完善,產(chǎn)品測試數(shù)據(jù)合格。測試曲線與圖2所示標(biāo)準(zhǔn)測試曲線基本吻合,說明測試結(jié)果準(zhǔn)確。
3.2 測量系統(tǒng)分析
3.2.1 不確定度分析
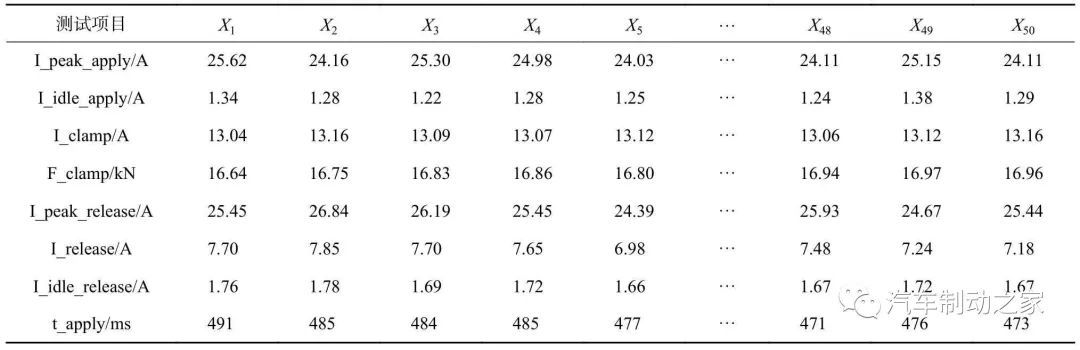
根據(jù)JJF1059—2012《測量不確定度評定與表示》中不確定度的定義及評定要求對檢測系統(tǒng)的測試電流值和力值進(jìn)行不確定度評定。選擇一件測試合格的EPB卡鉗,由同一測試人員在相同測試條件下,重復(fù)測試50次,共計50組數(shù)據(jù),如表4所示。
表4 重復(fù)性測試數(shù)據(jù)
檢測系統(tǒng)由測量重復(fù)性引起的不確定度是采用統(tǒng)計分析法對不確定度值進(jìn)行計算,屬于A類不確定度評定;而來自于傳感器、采集卡、可編程電源的不確定分量根據(jù)產(chǎn)品技術(shù)手冊認(rèn)為屬于等概率事件,故假設(shè)服從均勻分布,屬于B類不確定度評定。因此測試電流值由測量重復(fù)性引起的不確定度分量u1a用A類評定,由可編程電流源引起的不確定度分量u11和 數(shù)據(jù)采集卡引起的不確定度分量u12用B類評定;測試力值由測量重復(fù)性引起的不確定度分量u2a用A類評定,由力傳感器引起的不確定度分量u21和 數(shù)據(jù)采集卡引起的不確定度分量u22用B類評定。
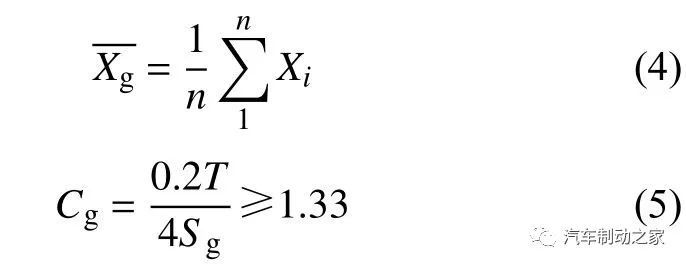
式中:Xi——單次測得數(shù)據(jù);
n——測量次數(shù);
Sg——標(biāo)準(zhǔn)偏差;
ua——算術(shù)平均值的標(biāo)準(zhǔn)差。
根據(jù)A類評定公式(1)、(2)可以求得測試電流I_peak_apply、I_idle_apply、I_clamp、I_peak_release、I_release、I_idle_release由測量重復(fù)性引起的不確定度分量分別為0.093 A、0.010 A、0.010 A、0.114 A、0.033 A、0.010 A;測試力值F_clamp由測量重復(fù)性引起的不確定度分量為0.035 kN。
根據(jù)B類評定方法,查閱相關(guān)資料可得,測試電流值由可編程電源引起的標(biāo)準(zhǔn)不確定度分量u11為0.006 A,數(shù)據(jù)采集卡引起的電流測試系統(tǒng)標(biāo)準(zhǔn)不確定度分量u12約為0.024 A;測試力值由力傳感器引起的標(biāo)準(zhǔn)不確定度分量u21約為0.029 kN,數(shù)據(jù)采集卡引起的不確定度分量u22為0.024 kN。各測試參數(shù)合成標(biāo)準(zhǔn)不確定度為uc。
因為各測試參數(shù)之間相互獨(dú)立,故用公式(3)計算各合成不確定度如表5所示,實(shí)驗重復(fù)性較好,滿足測試要求。
表5 不確定度分析結(jié)果
3.2.2 重復(fù)性分析
依據(jù)標(biāo)準(zhǔn)JBT 10633-2006《專用檢測設(shè)備評定方法指南》[16],采用MSA的測量能力指標(biāo)對重復(fù)性進(jìn)行評價。根據(jù)測量能力指標(biāo)計算公式對系統(tǒng)測試數(shù)據(jù)進(jìn)行計算,得到系統(tǒng)各功能項重復(fù)性測試數(shù)據(jù)如表6所示。
表6 重復(fù)性評定數(shù)據(jù)
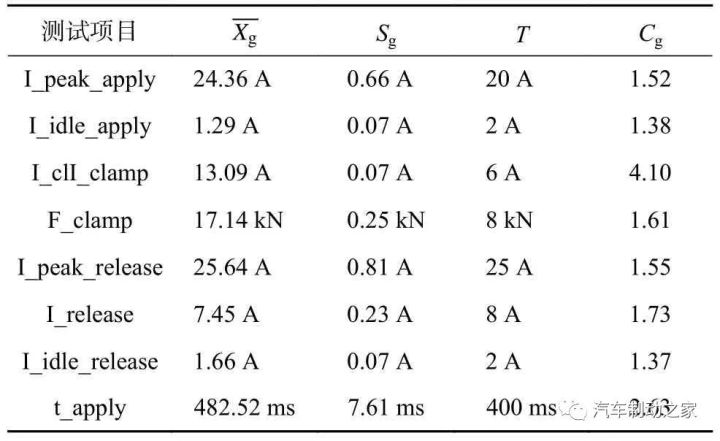
結(jié)果表明:各項測量能力指標(biāo) Cg均大于1.33,驗證了系統(tǒng)的穩(wěn)定性。MSA測量能力指標(biāo)計算公式:
式中:Xi——單次測得數(shù)據(jù);
n——測量次數(shù);
T——合格公差;
Cg——測量能力指數(shù)。
表6為系統(tǒng)重復(fù)性評定數(shù)據(jù)。依據(jù)評定方法指南:對于新系統(tǒng)驗收要求各測試項測量能力指數(shù)Cg≥ 1.33。
4 結(jié)束語
基于EPB卡鉗的結(jié)構(gòu)特征和工作原理,制定EOL性能測試方案,設(shè)計了正反轉(zhuǎn)切換電路和特征點(diǎn)截取算法,研制了EPB卡鉗EOL性能在線測試系統(tǒng),實(shí)現(xiàn)對其EOL性能的在線測試。經(jīng)重復(fù)性評定,系統(tǒng)各項性能評價指標(biāo)均符合《專用檢測設(shè)備評定方法指南》中對新設(shè)備的驗收要求,現(xiàn)投入相關(guān)客戶現(xiàn)場用于EPB卡鉗的出廠質(zhì)量檢測。
作者:陳宇飛1,郭 斌1,胡曉峰1,范偉軍1,江文松1,趙 靜2;1.中國計量大學(xué)計量測試工程學(xué)院,2.杭州沃鐳智能科技股份有限公司



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
