




 廣告
廣告





















































首頁(yè) > 汽車(chē)技術(shù) > 正文
泛亞汽車(chē) | 臺(tái)架模擬48V微混整車(chē)開(kāi)發(fā)應(yīng)用研究
2021-11-24 12:57:02· 來(lái)源:電動(dòng)學(xué)堂 作者:吳承文等

文章來(lái)源:泛亞汽車(chē)技術(shù)中心有限公司試驗(yàn)認(rèn)證及試車(chē)場(chǎng)部引言隨著2016年我國(guó)第四階段《乘用車(chē)燃料消耗量限值》的頒布實(shí)施,2020年乘用車(chē)平均燃料消耗量達(dá)到5L/lOO
文章來(lái)源:泛亞汽車(chē)技術(shù)中心有限公司試驗(yàn)認(rèn)證及試車(chē)場(chǎng)部
引言
隨著2016年我國(guó)第四階段《乘用車(chē)燃料消耗量限值》的頒布實(shí)施,2020年乘用車(chē)平均燃料消耗量達(dá)到5L/lOOkm。在法規(guī)政策驅(qū)動(dòng)背景下混動(dòng)車(chē)型的研發(fā)成為新的技術(shù)創(chuàng)新方向,其對(duì)應(yīng)的排放開(kāi)發(fā)亦尤為重要。
目前,強(qiáng)混和插電式混合動(dòng)力技術(shù)系統(tǒng)復(fù)雜、成本較高,48V微混系統(tǒng)以其低成本、高節(jié)油性能得到了各整車(chē)廠及電噴供應(yīng)商的認(rèn)同。在PO結(jié)構(gòu)的48V微混系統(tǒng)中,傳動(dòng)帶驅(qū)動(dòng)起動(dòng)/發(fā)電一體機(jī)(belt-driven starter generator, BSG)得到應(yīng)用,取代了12V的發(fā)電機(jī)。
由于整車(chē)開(kāi)發(fā)周期較長(zhǎng),為了縮短開(kāi)發(fā)周期、降低開(kāi)發(fā)成本,在開(kāi)發(fā)階段完成對(duì)模型的驗(yàn)證,V模式開(kāi)發(fā)流程被廣泛應(yīng)用于整車(chē)開(kāi)發(fā)領(lǐng)域。與此同時(shí)設(shè)計(jì)一種臺(tái)架真實(shí)模擬整車(chē)的行駛阻力、駕駛員、整車(chē)模型及整車(chē)功能從而使部分整車(chē)開(kāi)發(fā)工作前置可以進(jìn)一步縮短V模式開(kāi)發(fā)周期。本文主要研究某帶BSG電機(jī)的48V微混車(chē)型早期工程樣車(chē)造車(chē)前在動(dòng)力總成臺(tái)架僅使用發(fā)動(dòng)機(jī)+變速器+48V三電系統(tǒng),通過(guò)AVL Puma及Canoe軟件模擬整車(chē)行駛阻力,駕駛員特性,整車(chē)自動(dòng)起停、加速踏板、制動(dòng)踏板、電子排擋、空調(diào)負(fù)載等整車(chē)功能,完成某搭載BSG48V微混車(chē)型HCU軟件功能調(diào)試及HCU混動(dòng)功能標(biāo)定開(kāi)發(fā),同時(shí)通過(guò)Puma軟件編寫(xiě)運(yùn)行WLTC循環(huán)與實(shí)車(chē)轉(zhuǎn)載WLTC排放循環(huán)對(duì)標(biāo),完成整車(chē)排放開(kāi)發(fā),以縮短整車(chē)開(kāi)發(fā)周期。
1臺(tái)架設(shè)計(jì)
1.1常規(guī)動(dòng)力總成試驗(yàn)室概括
常規(guī)動(dòng)力總成臺(tái)架試驗(yàn)室構(gòu)造主要是由AVLFEM數(shù)采模塊系統(tǒng)、INCA、發(fā)動(dòng)機(jī)冷卻液、機(jī)油及變速器油溫控系統(tǒng)、AVLACS進(jìn)氣系統(tǒng)、中冷溫控系統(tǒng)、排氣流量計(jì)、AMA60排放分析儀、排氣抽風(fēng)系統(tǒng)、試驗(yàn)室消防安全矩陣系統(tǒng)、帶空氣彈簧減震鐵平板系統(tǒng)、AVL740油耗儀供油系統(tǒng)、雙電力測(cè)功機(jī)系統(tǒng)、臺(tái)架運(yùn)轉(zhuǎn)主控軟件Puma、臺(tái)架公共水電氣能源系統(tǒng)、被測(cè)樣機(jī)等組成。
1.248V微混整車(chē)模擬臺(tái)架設(shè)計(jì)
48V輕度混合動(dòng)力系統(tǒng)(簡(jiǎn)稱(chēng)48V系統(tǒng))由發(fā)動(dòng)機(jī)管理系統(tǒng)、起停電機(jī)、DC-DC直流轉(zhuǎn)換器及電池管理系統(tǒng)組成。
按照電機(jī)所安裝位置的不同,48V微混系統(tǒng)可以分為BSG(belt-driven starter generator)以及ISG(:integrated starter generator)兩種形式。BSG通過(guò)傳動(dòng)帶將起停電機(jī)與發(fā)動(dòng)機(jī)相連,這也稱(chēng)P0架構(gòu);ISG是將電機(jī)與發(fā)動(dòng)機(jī)和變速器同軸布置,通過(guò)一個(gè)或多個(gè)離合器來(lái)控制發(fā)動(dòng)機(jī)和電機(jī)的轉(zhuǎn)矩耦合,有Pl和P2兩種形式。
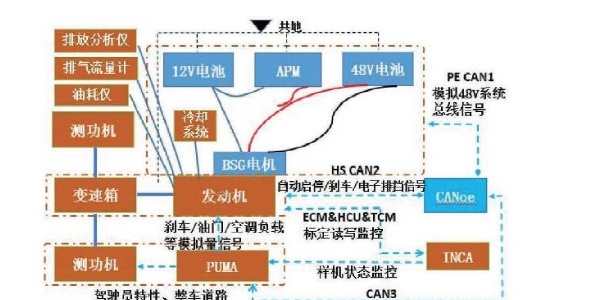
本文研究的是基于常規(guī)動(dòng)力總成臺(tái)架帶BSG+APM+48V電池臺(tái)架模擬整車(chē)功能設(shè)計(jì)。臺(tái)架實(shí)際試驗(yàn)對(duì)象為:BSG電機(jī)(帶MCU控制單元)、ECU(集成HCU控制單元)、TCM、APM、12V蓄電池、48V電池、改裝過(guò)適用于臺(tái)架的線束、發(fā)動(dòng)機(jī)、變速器及半軸。由于要在該臺(tái)架完成HCU軟件功能調(diào)試、HCU混動(dòng)功能標(biāo)定開(kāi)發(fā)及WLTC循環(huán)排放開(kāi)發(fā)并與整車(chē)轉(zhuǎn)載對(duì)標(biāo),需要在動(dòng)力總成臺(tái)架模擬一輛真實(shí)的整車(chē)及其行駛的環(huán)境。為此接下來(lái)需要真實(shí)模擬整車(chē)在道路上的行駛阻力、車(chē)輛駕駛員、整車(chē)Power-mode冷起動(dòng)功能(BAT、ACC、Ignition、Crank/Run功能)、整車(chē)自動(dòng)起停功能、整車(chē)電子加速踏板、制動(dòng)踏板、空調(diào)負(fù)載等整車(chē)功能。
基于此我們?cè)O(shè)計(jì)了如圖1所示的臺(tái)架系統(tǒng),該系統(tǒng)包含設(shè)備連接方式、采樣系統(tǒng)、被測(cè)樣機(jī)組成、主控軟件、CAN總線信號(hào)模擬、硬線信號(hào)模擬及整車(chē)功能塊模擬。

2整車(chē)模擬
2.1整車(chē)行駛阻力模擬
車(chē)輛正常行駛在道路上所受的阻力有:空氣阻力、滾動(dòng)阻力、加速阻力及坡道阻力。加速阻力僅在車(chē)輛車(chē)速變化時(shí)產(chǎn)生,因此行駛車(chē)輛的阻力公式為:
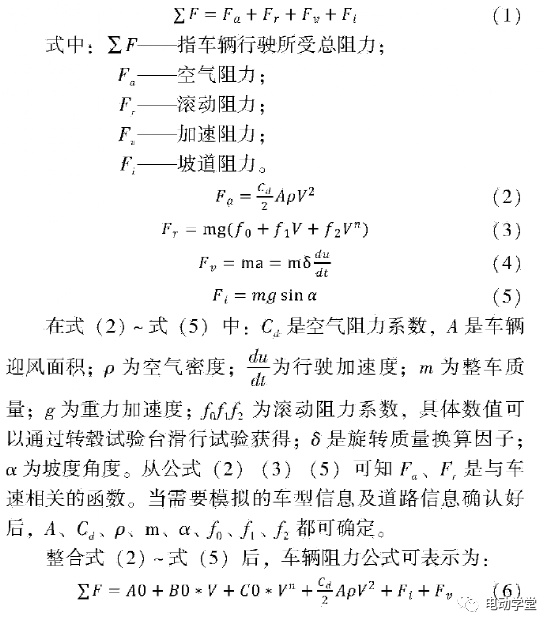
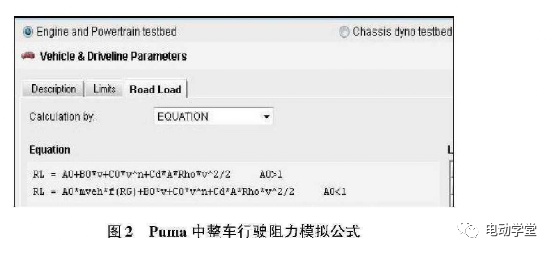
其中FvFi寸,在車(chē)速及坡度變化時(shí),Puma可以根據(jù)坡度、整車(chē)質(zhì)量及各個(gè)轉(zhuǎn)動(dòng)慣量經(jīng)過(guò)計(jì)算后施加在測(cè)功機(jī)上。空氣阻力及滾動(dòng)阻力在Puma軟件中模擬如圖2所示。
2.2整車(chē)模型模擬
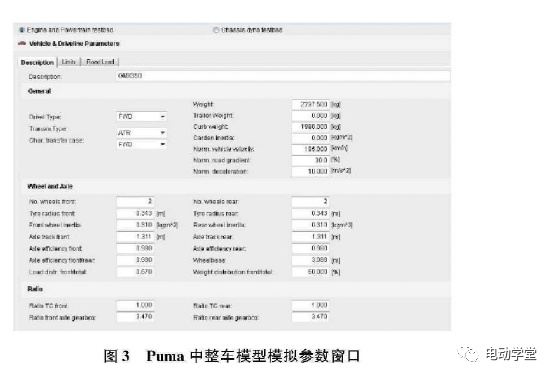
Puma軟件有整車(chē)模型模擬功能,可以在參數(shù)配置模塊輸入驅(qū)動(dòng)類(lèi)型(前驅(qū)/后驅(qū)/四驅(qū))、變速器類(lèi)型、車(chē)重、輪胎數(shù)量、前后輪胎半徑及轉(zhuǎn)動(dòng)慣量、主減速比等整車(chē)信息,具體如圖3所示。
2.3駕駛員模擬
Puma具備駕駛員模擬功能,主要包括踩油門(mén)、踩制動(dòng)踏板、換檔等功能。
2.3.1加速踏板功能模擬
此次設(shè)計(jì)的臺(tái)架不帶真實(shí)加速踏板,需根據(jù)加速踏板特性進(jìn)行信號(hào)模擬。整車(chē)加速踏板在駕駛員踩加速踏板時(shí)會(huì)往總線發(fā)送高低兩路電壓信號(hào),且高低兩路電壓數(shù)值成2倍關(guān)系,其中低路電壓為0.25~2.2V,高路電壓為0.5~4.4V。
為此在臺(tái)架數(shù)采系統(tǒng)AO(An alog Out)模塊設(shè)置高低路電壓輸出通道,分別線性對(duì)應(yīng)加速踏板0-100%開(kāi)度,同時(shí)通過(guò)硬線與線束上對(duì)應(yīng)的PIN腳連接。當(dāng)Puma進(jìn)行車(chē)速PIO閉環(huán)控制時(shí)會(huì)根據(jù)所需的節(jié)氣門(mén)開(kāi)度向?qū)?yīng)PIN輸出所需的電壓。
2.3.2制動(dòng)踏板功能模擬
該臺(tái)架不帶真實(shí)制動(dòng)踏板,需根據(jù)制動(dòng)踏板的物理特性進(jìn)行信號(hào)模擬。當(dāng)制動(dòng)制動(dòng)時(shí),制動(dòng)標(biāo)志位對(duì)應(yīng)的線束PIN腳信號(hào)會(huì)從0V變?yōu)?2V,制動(dòng)踏板會(huì)向總線發(fā)送0~5V范圍內(nèi)的電壓信號(hào),電壓值與制動(dòng)踏板開(kāi)度正相關(guān)。為此在Puma中編輯式(7)模擬踏板制動(dòng)輸出電壓:

將制動(dòng)標(biāo)志位及踏板百分比對(duì)應(yīng)的輸出電壓,關(guān)聯(lián)到臺(tái)架數(shù)采系統(tǒng),AO模塊通過(guò)硬線連接到總線相應(yīng)PIN腳。當(dāng)需要模擬實(shí)車(chē)制動(dòng)制動(dòng)時(shí)會(huì)根據(jù)所需踏板開(kāi)度向?qū)?yīng)PIN腳輸出對(duì)應(yīng)電壓。
此外,通過(guò)Puma將制動(dòng)標(biāo)志位及制動(dòng)踏板開(kāi)度以CAN信號(hào)形式發(fā)送給Canoe,Canoe再模擬制動(dòng)狀態(tài)報(bào)文所包含的其他信息到總線上。
2.3.3電子掛檔功能模擬
由于被測(cè)件帶電子掛檔功能,需在臺(tái)架實(shí)現(xiàn)電子掛檔功能模擬。主要是通過(guò)Puma系統(tǒng)發(fā)送換檔指令,利用CANOE腳本將指令轉(zhuǎn)換為T(mén)CM可識(shí)別的總線信號(hào)實(shí)現(xiàn)電子掛檔功能。
2.3.4車(chē)速PID控制
Puma會(huì)實(shí)時(shí)對(duì)比目標(biāo)車(chē)速與實(shí)際車(chē)速的偏差通過(guò)PID調(diào)節(jié)電子節(jié)氣門(mén)開(kāi)度及制動(dòng)強(qiáng)度以確保實(shí)際車(chē)速與目標(biāo)車(chē)速保持一致。電子節(jié)氣門(mén)PID控制邏輯見(jiàn)圖4,制動(dòng)控制邏輯見(jiàn)圖5。

2.4整車(chē)功能模擬
2.4.1冷起動(dòng)功能模擬
為實(shí)現(xiàn)冷起動(dòng)功能,將線束PIN腳更改后Puma模擬Powennode對(duì)應(yīng)的BAT、ACC、IGN、Run狀態(tài),并通過(guò)CAN信號(hào)將對(duì)應(yīng)的標(biāo)志值發(fā)給Canoe,Canoe模擬BCM功能將信號(hào)發(fā)到總線上,模擬KeyStmi冷起動(dòng)數(shù)據(jù)見(jiàn)圖6。
2.4.2自動(dòng)起停功能模擬
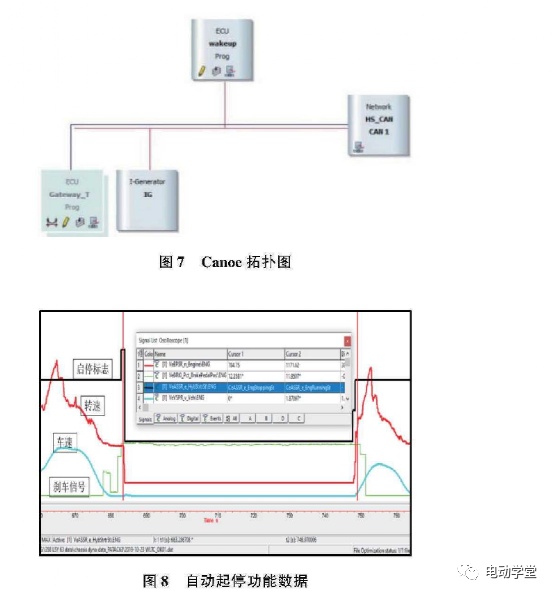
對(duì)于自動(dòng)起停功能模擬,由于臺(tái)架不帶BCM,需要先通過(guò)Canoe模擬BCM的總線喚醒功能,并根據(jù)自動(dòng)起??刂七壿嫞M前艙蓋開(kāi)關(guān)量等信號(hào),同時(shí)通過(guò)INCA更改標(biāo)定,屏蔽整車(chē)非必要起停條件,Canoe的拓?fù)浣Y(jié)構(gòu)如圖7。ECM會(huì)根據(jù)總線上的BSG電機(jī)功率、48VSOC狀態(tài)、12V蓄電池電壓狀態(tài)及制動(dòng)狀態(tài)等信號(hào)控制自動(dòng)起停,功能實(shí)現(xiàn)見(jiàn)圖8。
2.4.3空調(diào)負(fù)載模擬
為確保臺(tái)架模擬整車(chē)WLTC排放結(jié)果與實(shí)車(chē)一致性,需模擬空調(diào)負(fù)載。臺(tái)架通過(guò)DO(開(kāi)關(guān)量數(shù)字輸出信號(hào))模塊模擬空調(diào)的開(kāi)關(guān)狀態(tài),通過(guò)AO模塊模擬不同工況下空調(diào)壓力傳感器電壓信號(hào),輸出到線束對(duì)應(yīng)PIN腳并通過(guò)Canoe模擬相關(guān)總線信號(hào)。最后,在Puma中模擬空調(diào)工作產(chǎn)生的負(fù)載轉(zhuǎn)矩并施加到測(cè)功機(jī)上。
3軟件功能調(diào)試及HCU混動(dòng)標(biāo)定開(kāi)發(fā)
實(shí)現(xiàn)整車(chē)行駛阻力、整車(chē)模型、駕駛員特性、整車(chē)功能模擬后,在臺(tái)架進(jìn)行coastdown滑行試驗(yàn),與實(shí)車(chē)滑行曲線擬合修正AO、BO、CO系數(shù)。
修正AO、BO、co系數(shù)后臺(tái)架滑行試驗(yàn)數(shù)據(jù)如圖9所示,圖中縱坐標(biāo)黑線為車(chē)速,紅線為對(duì)應(yīng)的道路阻力,橫坐標(biāo)為時(shí)間。核對(duì)臺(tái)架與實(shí)車(chē)車(chē)速-時(shí)間滑行仙線一致后完成軟件功能調(diào)試,包含ECM、TCM、BMS、APM、BSG的軟件功能調(diào)試,確保各控制器功能正常。同時(shí)完成了HCU混動(dòng)功能標(biāo)定開(kāi)發(fā),包含換檔控制、智能充電(圖10)、智能放電(圖11)、怠速充電、電壓控制、轉(zhuǎn)矩輔助、DFCO減速斷油、自動(dòng)起停控制(圖8)、48V系統(tǒng)電量平衡、制動(dòng)能量回收、48V系統(tǒng)繼電器控制等混動(dòng)功能標(biāo)定開(kāi)發(fā)。
4整車(chē)WLTC排放對(duì)標(biāo)
4.1WLTC循環(huán)PID調(diào)試
在臺(tái)架進(jìn)行排放開(kāi)發(fā),首先要實(shí)現(xiàn)排放循環(huán)工況模擬,現(xiàn)行國(guó)六法規(guī)采用WLTC循環(huán),其較NEDC循環(huán)里程長(zhǎng),交變工況多,提高臺(tái)架和轉(zhuǎn)載實(shí)車(chē)WLTC循環(huán)發(fā)動(dòng)機(jī)工況一致性是臺(tái)架模擬整車(chē)進(jìn)行排放開(kāi)發(fā)的首要任務(wù)。
在Puma中完成WLTC循環(huán)自動(dòng)運(yùn)行腳本編寫(xiě)并成功驗(yàn)證整車(chē)滑行曲線后,進(jìn)行WLTC循環(huán)PID調(diào)試,優(yōu)化車(chē)速跟隨性效果。為確保臺(tái)架運(yùn)行WLTC循環(huán)尾氣排放結(jié)果與轉(zhuǎn)載對(duì)標(biāo)一致性,整個(gè)WLTC循環(huán)下臺(tái)架和轉(zhuǎn)載對(duì)應(yīng)的發(fā)動(dòng)機(jī)工況需高度一致,因此臺(tái)架的駕駛員特性模擬需與真實(shí)駕駛員具有高度相似的控制行為。一般情況下,在變工況時(shí)PID控制器相比真實(shí)駕駛員節(jié)氣門(mén)動(dòng)作較大且持續(xù)時(shí)間較短,容易導(dǎo)致變速器檔位變化和轉(zhuǎn)載臺(tái)架具有較大的差異。這種情況下需要對(duì)PID控制器進(jìn)行細(xì)調(diào),為此我們創(chuàng)新性地將整個(gè)WLTC循環(huán)車(chē)速范圍細(xì)分為5個(gè)區(qū)間,并為每段車(chē)速區(qū)間配置精細(xì)PID控制參數(shù)。
PID調(diào)試后臺(tái)架與實(shí)車(chē)轉(zhuǎn)載WLTC循環(huán)下的整車(chē)、發(fā)動(dòng)機(jī)及變速器工況對(duì)比數(shù)據(jù)見(jiàn)圖12。其中第一行為變速器檔位對(duì)比,第二行為發(fā)動(dòng)機(jī)轉(zhuǎn)速對(duì)比,第三行為WLTC循環(huán)車(chē)速對(duì)比,從圖中可以看出,臺(tái)架與轉(zhuǎn)載實(shí)車(chē)WLTC循環(huán)的車(chē)速一致性大于95%且都符合法規(guī)要求、發(fā)動(dòng)機(jī)轉(zhuǎn)速及變速器檔位變化一致性高。
4.2水、機(jī)油、催化器溫度一致性控制
臺(tái)架對(duì)比實(shí)車(chē)沒(méi)有發(fā)動(dòng)機(jī)倉(cāng)對(duì)催化器保溫功能,這會(huì)影響催化器起燃效果,且臺(tái)架所處環(huán)境與整車(chē)不同,發(fā)動(dòng)機(jī)及變速器與周?chē)h(huán)境熱交換速率不同。因此臺(tái)架模擬整車(chē)排放開(kāi)發(fā)需要確保被測(cè)樣機(jī)冷卻液溫度、機(jī)油溫度、催化器溫度與整車(chē)保持一致?;谠撃繕?biāo),本文作者使用外部溫控設(shè)備對(duì)發(fā)動(dòng)機(jī)冷卻液、發(fā)動(dòng)機(jī)機(jī)油、變速器油進(jìn)行PIO閉環(huán)溫控調(diào)節(jié)。在WLTC第一個(gè)階段,對(duì)發(fā)動(dòng)機(jī)冷卻液進(jìn)行加熱,保證溫度上升與整車(chē)一致,完全熱機(jī)后,在后續(xù)三個(gè)階段切入內(nèi)循環(huán)完全由ECU進(jìn)行ATM(自動(dòng)溫控管理系統(tǒng))控制。臺(tái)架與整車(chē)轉(zhuǎn)骰溫控結(jié)果對(duì)比見(jiàn)圖13,一致性高于90%,圖中第一行為發(fā)動(dòng)機(jī)機(jī)油溫度對(duì)比曲線,第二行為變速器油溫對(duì)比曲線、第三行為發(fā)動(dòng)機(jī)冷卻液溫度對(duì)比曲線,第四行為WLTC循環(huán)車(chē)速對(duì)比曲線。
同時(shí)在催化器外部包裹保溫材料后催化器入口溫度及中心溫度和整車(chē)一致性大于90%,如圖14所示。圖中第一行曲線為催化器中心溫度對(duì)比,第二行為催化器入口處溫度對(duì)比,第三行為WLTC循環(huán)車(chē)速對(duì)比。

4.3WLTC排放結(jié)果對(duì)標(biāo)
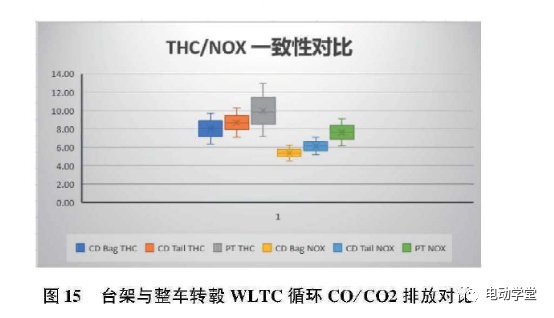
在確認(rèn)WLTC循環(huán)發(fā)動(dòng)機(jī)工況、催化器溫度、變速器油溫、冷卻液及機(jī)油溫度臺(tái)架與整車(chē)一致后,我們對(duì)臺(tái)架與實(shí)車(chē)轉(zhuǎn)載多次重復(fù)WLTC排放結(jié)果對(duì)比。CO和CO2排放一致性大于90%(圖15),由于熱機(jī)和起燃階段臺(tái)架排溫稍低,THC和NOX一致性大于80%,臺(tái)架略高于整車(chē)(圖16)。圖中CDBag為轉(zhuǎn)載袋采排放結(jié)果,CD Tail為轉(zhuǎn)載直采排放結(jié)果,門(mén)為臺(tái)架排放結(jié)果,后續(xù)研究將繼續(xù)優(yōu)化臺(tái)架熱機(jī)和起燃階段的排溫保溫方案。
5結(jié)論
本文詳細(xì)闡述了在某48V微混車(chē)型早期工程樣車(chē)造車(chē)階段之前,通過(guò)臺(tái)架模擬整車(chē)道路負(fù)載、整車(chē)參數(shù)模型、整車(chē)功能(電子節(jié)氣門(mén)/制動(dòng)踏板/冷起動(dòng)/自動(dòng)起停/電子掛檔等)、駕駛員特性等技術(shù)手段取得如下成果:
l)在動(dòng)力總成臺(tái)架完成各控制器軟件功能調(diào)試、HCU混動(dòng)功能標(biāo)定開(kāi)發(fā)(如換檔控制、智能充放電、自動(dòng)起??刂?、扭矩輔助、制動(dòng)能量回收)等常規(guī)依賴(lài)實(shí)車(chē)進(jìn)行的整車(chē)開(kāi)發(fā)工作。
2)臺(tái)架WLTC循環(huán)與整車(chē)轉(zhuǎn)載對(duì)標(biāo)車(chē)速一致性大于95%且都滿足法規(guī)要求,發(fā)動(dòng)機(jī)轉(zhuǎn)速及變速器檔位變化一致性高,co、CO2排放一致性大于90%,THC、NO,一致性大于80%。
3)充分驗(yàn)證了動(dòng)力總成臺(tái)架模擬整車(chē)開(kāi)發(fā)應(yīng)用研究的可行性,使得部分依賴(lài)早期工程樣車(chē)所進(jìn)行的整車(chē)開(kāi)發(fā)工作能夠前置,可以提高整車(chē)開(kāi)發(fā)效率、縮短整車(chē)開(kāi)發(fā)周期,節(jié)省部分整車(chē)開(kāi)發(fā)費(fèi)用。
4)該應(yīng)用研究具有可推廣性,并能起到一定的技術(shù)借鑒意義。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 104



 廣告
廣告 編輯推薦




最新資訊
-
“汽車(chē)爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開(kāi)發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車(chē)備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車(chē)前照燈配光性能的工
2026-03-03 12:07
