




 廣告
廣告





















































使用 DES 和 LES 的不可壓縮和可壓縮求解器研究通用側視鏡的內部噪聲
2021-11-26 19:38:55· 來源:AutoAero

摘要外部湍流是汽車座艙內部噪聲的重要來源。湍流沖擊艙室的窗戶,激發(fā)產生內部噪聲的結構振動。同時,湍流產生的外部噪聲也會引起車窗振動,產生內部噪聲。安裝
摘要
外部湍流是汽車座艙內部噪聲的重要來源。湍流沖擊艙室的窗戶,激發(fā)產生內部噪聲的結構振動。同時,湍流產生的外部噪聲也會引起車窗振動,產生內部噪聲。安裝在車窗上游的側視鏡是誘發(fā)湍流的主要車身部件之一。在本文中,我們研究了由普通側視鏡引起的車內噪聲。車內噪聲在帶有矩形玻璃窗的長方體腔中傳播。采用先進的CFD方法計算外部流動和外部噪聲:可壓縮大渦模擬、可壓縮分離渦模擬(DES)、不可壓縮DES和與聲波模型耦合的不可壓縮DES。最后一種方法是分別模擬水動力和聲壓。在計算內部噪聲時,將氣流和噪聲的壓力波動施加在窗口上,而在流動模擬中忽略了窗口振動反饋對氣流的反向影響。討論了局部流動特性。高能表面壓力出現在鏡側邊緣的剪切層撞擊窗口的區(qū)域,量化了水動力和聲壓對車內噪聲的貢獻。研究發(fā)現,聲學成分在車內噪聲產生中更有效,并且在高頻時起主導作用。
1.介紹
車內噪聲是汽車行業(yè)關注的問題,目的是為長期暴露在噪聲中的駕駛員和乘客創(chuàng)造舒適的環(huán)境。然而,由氣流引起的車內噪聲并未得到有效控制。
側視鏡是汽車駕駛室內噪聲的重要來源。反射鏡產生的高能渦流可產生顯著的外部噪聲和強大的流體動力沖擊。在道路試驗中,對一輛車的外部氣流和噪聲引起的內部噪聲進行了測量。同時還使用了經驗統計能量分析(SEA)模型分析外部聲壓和水動力壓力對內部噪聲的影響。研究發(fā)現,外部聲壓非常重要,盡管在100 Hz至5000 Hz的頻率范圍內,外部聲壓比水動力壓力低20dB至40dB。在Vanherpe等人的研究中,進行了可壓縮流模擬,以分析由于反射鏡引起的尾跡撞擊而產生的外表面壓力波動的頻譜。在光譜中可以清楚地分辨出與水動力和聲壓相關的兩個區(qū)域。對安裝在通用車輛模型上的生產鏡的內部噪聲進行了實驗和數值研究。在他們的研究中,根據頻譜將外表面壓力分解為水動力壓力和聲壓,聲壓是車內噪音產生的主要原因。在模擬和實驗中,進一步探索了裝配在測試車上的測試鏡的頻譜。在大部分車窗的高頻處,外部聲壓是主要的內部噪聲源,但靠近后視鏡的區(qū)域除外,該區(qū)域的水動力壓力更有效。在Schell和Cotoni最近的一項研究中,預測了通用車中由氣流引起的內部噪聲。除了后視鏡外,還提出了一種通用側視(GSV)后視鏡。他們在模擬和實驗中研究了表面壓力和外部遠場噪聲。由于尾流的撞擊而產生的表面壓力波動是主要的外部噪聲源。從鏡側邊緣撞擊板,然后形成強大的脈動壓力區(qū)。此外,使用不可壓縮大渦模擬(I-LES)和不可壓縮分離渦模擬(I-DES)對通用側視鏡進行了研究。使用Ffowcs Williams和Hawkings(FW-H)聲學類比預測遠場外部噪聲。他們關于表面壓力的結果與實驗結果一致。
本研究旨在研究由GSV反射鏡產生的渦流致內部噪聲,將探討噪聲產生過程的基本機理。另一個目的是研究不同的計算流體動力學(CFD)和計算氣動聲學(CAA)方法預測車內噪聲的性能。CFD方法包括可壓縮大渦模擬(C-LES)、可壓縮DES(C-DES)和不可壓縮DES(I-DES)。CAA方法是I-DES和聲波模型(AWM)的耦合方法。對于I-DES,將討論網格拓撲的影響。此外,還將討論噪聲源、外部水動力和聲壓的貢獻。將闡明在車內噪聲預測中考慮外部壓縮性的重要性。
2.結構
配置如圖1所示,GSV后視鏡組裝在一塊板上,反射鏡和平板的尺寸根據實驗的設置進行設計,而平板的前緣角被磨圓,以符合反射鏡誘導的尾跡產生的球形聲波的輻射。在板下放置一個空腔,由厚度為0.004m的玻璃制成的窗戶設置在板和空腔之間的接口上。流動的表面壓力波動刺激窗口振動,然后,振動會在腔體中產生內部噪音。外部和內部空氣均假設為理想氣體,分子量為28.97 kg/kmol,外部流動的自由流速度矢量為(39.89 0 0)m/s。自由流壓力為101325kPa。自由流溫度為300K。
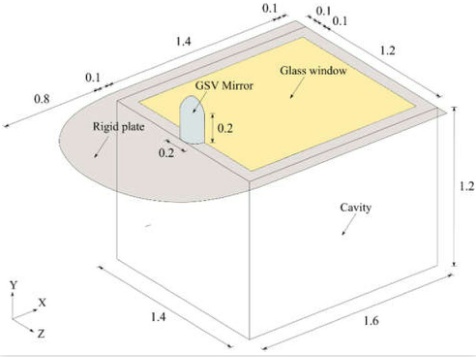
圖1 GSV反射鏡、玻璃窗和腔體組成的配置圖,長度刻度單位為m
3.數值方法
3.1 氣動聲學方法
流動的連續(xù)性、動量和能量的控制方程在流體力學領域是眾所周知的。因此,為了簡潔起見,不介紹這些內容。由于本研究中的模擬是使用STAR-CCM軟件進行的,請參考本軟件用戶指南中方程的詳細信息。
采用C-LES、C-DES和I-DES等方法對流動進行了模擬。由于I-DES忽略了由于可壓縮性引起的密度變化,因此在計算中無法解析聲波。為了模擬這種方法的噪聲,使用了AWM。
3.1.1 CFD方法的數值離散化
采用有限體積法離散連續(xù)、動量和能量的輸運方程。分離流求解器用于求解離散化方程。分離流求解器采用半隱式壓力連接方程法(SIMPLE)算法。對于可壓縮流求解器,在更新壓力和溫度后,通過求解理想氣體的狀態(tài)方程獲得密度。
采用混合二階迎風有界中心格式離散單元表面的對流通量,二階格式對內部和邊界單元表面的擴散通量進行離散。梯度計算采用二階混合高斯-LSQ方法,包括重建單元表面的場值、擴散通量的二次梯度、壓力梯度以及湍流模型的應變和旋轉速率。
采用二階隱式方法離散時間導數,在時間推進過程中,采用了一種在預處理偽時間步上進行內迭代的雙時間步方法。
3.1.2.?湍流模擬
在DES方法中,使用改進的延遲分離渦模擬(IDDES)模擬湍流。IDDES模型的系數采用軟件中的默認值。當模擬中涉及壓縮性時,k-ω模型啟用壓縮性校正。湍流耗散通過增加作為湍流馬赫數函數的膨脹誘導耗散進行校正。
3.1.3.?I-DES的聲波模型
I-DES作為不可壓縮流動求解器,只能求解流體動壓,而不包括聲壓。然而,聲壓是造成車內噪聲的一個重要因素。因此,需要一個聲學解算器與I-DES耦合,以預測車內噪聲。
基于聲學微擾方程(APE)開發(fā)的AWM在STAR-CCM中實現。APE是通過對Navier-Stokes方程的線性化推導出來的。它解決了聲波產生的壓力和速度擾動。方程組左側描述了擾動的聲傳播。聲源位于右側。由于目前應用的馬赫數較低,平均流的對流在傳播過程中被忽略。聲源表示為壓力波動。APE簡化為AWM,如下所示:

式中,P′表示水動力壓力波動,c表示聲速,t表示時間。在耦合方法中,從I-DES獲得的壓力波動被輸入AWM。
3.2.?結構振動和車內噪聲的測量方法
玻璃窗和腔體構成一個結構聲學系統。結構聲學系統的頻域控制方程如下:

其中,下標S和A表示與窗結構和空氣相關的數量。外表面壓力波動(包括流體動力和聲學部分)來自CFD方法或耦合CFD/AWM方法。它作為強制邊界條件施加在玻璃窗上。結構/聲學耦合矩陣用CSA表示。結構聲學方程通過自由場技術產生的Actran中實施的有限元法進行求解。
4.數字設置
4.1.?邊界條件和解算器參數
計算域及其尺寸如圖2所示。為了減小聲波在遠場中傳播的入射角,在遠場中構造了圓形邊界。域的上游部分具有球形,以符合板的形狀。反射鏡和出口之間的距離足夠大,以減少出口處渦流發(fā)出的人為噪音。在反射鏡和板的表面上指定了防滑壁邊界條件。在域邊界的剩余部分,應用自由流邊界條件。
隔離流解算器中速度和壓力的欠松弛系數設置為0.6和0.3。湍流傳輸方程的欠松弛因子指定為0.6。每個時間步的最大內部迭代次數為20。根據對配置進行的初步數值試驗,該數值足以使解收斂。窗被建模為二維曲面。窗口和空腔之間的邊界設置為零位移和旋轉。在腔體壁上施加鏡面反射壁條件而不吸收反射聲波。
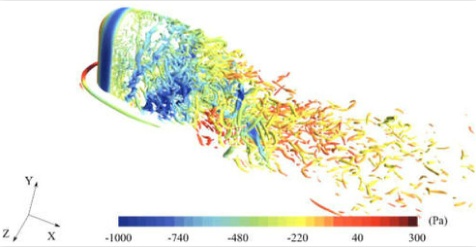
圖2 計算域的示意圖,標有長度刻度,單位是米。
4.2.?計算網格
該模型生成的非結構網格用于LES、C-DES和I-DES的流動模擬。此外,采用多面體網格方法生成非結構網格,并將其用于I-DES和AWM的耦合流-氣動聲學模擬。盡管網格生成方法不同,但兩個網格的分辨率由相同的參數控制。表面單元的大小介于0.001m和0.01m。
鏡像邊緣附近的體積單元大小控制在0.001m以下。并且對流動尾跡所在區(qū)域的體積單元進行了細化。該區(qū)域從后視鏡后表面開始,在1處結束。該區(qū)域在垂直于流向的方向上的寬度以10°的擴展角延伸。區(qū)域中的最大單元格大小設置為0.005m。網格的全局最大大小為0.05m。
基于我們之前的研究,網格增長率的范圍設為1.05到1.1。上述網格分辨率已在使用較粗分辨率網格的初步模擬中進行了檢查。y=0.1m的剖切面中的網格,如圖3所示。網格使用7個級別進行細化。與第7級細化級別相對應的最小單元位于鏡像邊緣附近。流動尾跡存在的區(qū)域包含在第5細化級別細化的單元。板上方的大多數單元在第四級細化級別以上細化。
圖4顯示了z=0m剖切面中的網格,該剖切面是鏡像幾何體的對稱平面。細化區(qū)域沿y軸方向以10°的擴展角擴展。這種細化使得剪切層和尾流中的流動結構具有良好的網格分辨率,在圖5中y=0的剖切面中查看多面體網格,該網格中細化區(qū)域的分布與網格一致。然而,在多面體網格中觀察到單元大小的平滑變化。這與網格不同,網格中的單元在每個細化級別的區(qū)域中具有統一的大小。切割后的網格包含2100萬個單元、6200萬個面和2100萬個頂點。多面體網格有800萬個單元、5300萬個面和4200萬個頂點。在模擬過程中,窗口被視為結構聲學系統中的一個曲面,生成了一個二維結構網格。這些單元格的大小為0.0125m??涨簧闪硪粋€結構化網格,單元格大小為0.025m,這些網格如圖6所示。
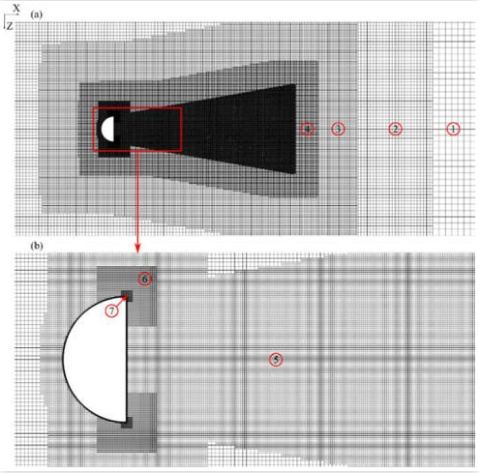
圖3 y=0.1m的剖切面中的網格。除了邊界層中的棱柱元素外,網格還細化為7個級別。紅色圓圈中標記的數字表示局部優(yōu)化級別,子圖(a)中的紅色矩形標記是子圖(b)中放大的區(qū)域。
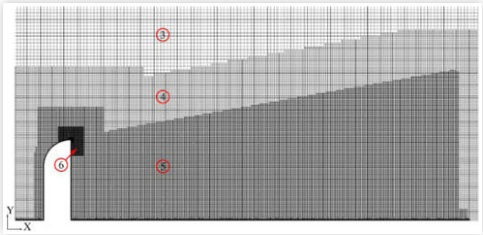
圖4 z=0m剖切面中的網格。紅色圓圈中的數字表示局部優(yōu)化級別。請注意,細化級別7的單元格由于尺寸較小而無法清晰顯示。
5.結果和討論
CFD模擬在瑞典國家計算基礎設施提供的集群上進行并行計算。
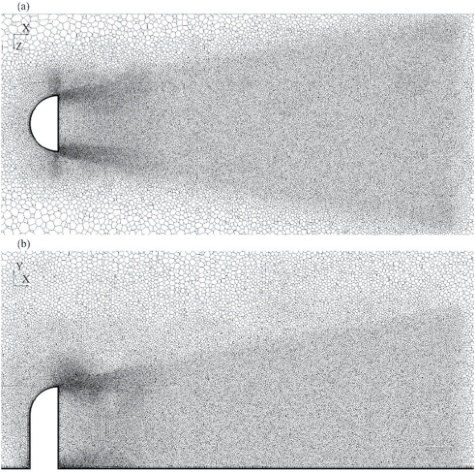
圖5 (a)y=0的剖切面中的多面體網格。1m和(b)z=0m,為耦合I-DES/APE生成網格。
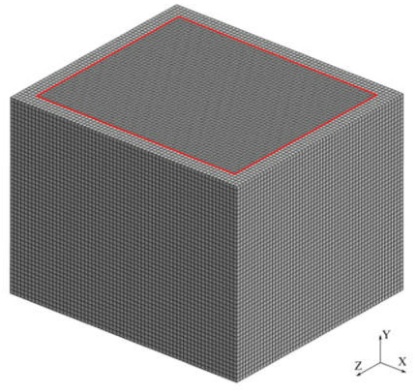
圖6 為窗口和空腔生成的結構化網格,窗口邊界用紅線標記。
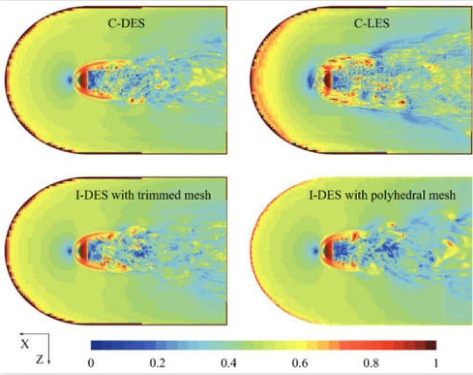
圖7??不同CFD方法消耗的每個時間步長的運行時間。
圖8??使用不同的CFD方法計算近壁細胞的y+。
通過對48個核的并行計算,評價了不同CFD方法的性能。圖7顯示了兩種方法之間每個時間步所用時間的比較。C-LES占用的時間最短。對于相同的網格,LES比DES消耗更少的計算資源,因為它求解的方程更少。I-DES的運行時間略小于C-DES的運行時間。這表明,模擬中涉及的壓縮性對計算速度的影響有限。與使用網格的I-DES相比,使用多面體網格的I-DES需要更多的計算資源。原因是前一個網格包含的頂點遠多于后一個網格,盡管這兩個網格是使用相同的網格密度設置生成的。當AWM用于重建外部聲波時,經過的時間與不帶AWM的I-DES相比增加1.2倍,原因是AWM的聲學模擬需要額外的計算資源。
物體的瞬時輪廓圖8顯示了近壁網格的y+。所有不同網格的CFD方法均達到除沿板材邊緣的狹窄區(qū)域外,大部分表面的y+小于1。由于板邊緣的邊界條件從自由流邊界條件變?yōu)楸诿孢吔鐥l件,因此高速度梯度會導致較大的值。小?y+表明邊界層在模擬中得到了很好的解決。C-DES和I-DES的結果是一致的,但在實驗中觀察到更寬的尾流區(qū)域是C-LES。此外,與DES方法相比,使用C-LES解析的反射鏡上游和剪切層附近的輪廓波動更大。
為了識別反射鏡誘導的旋渦,圖9顯示了用C-DES求解的Q準則的瞬時等值面為。在尾流中觀察漩渦,可以看到馬蹄形渦流在鏡子的上游形成。由于從其他CFD方法和網格中獲得的流動結構與C-DES相似,因此未對其進行說明。此后,在模擬持續(xù)時間為0.2s的情況下,計算流量的統計特征。在放置在鏡面上的監(jiān)視器上計算系數。監(jiān)視器的規(guī)格遵循H?ld等人和Siegert等人的實驗。為了簡潔起見,本文選擇了四個監(jiān)視器并對其進行了討論,盡管我們已經計算了所有監(jiān)視器的系數。所選監(jiān)控器的位置如圖10所示。所選監(jiān)視器稱為M5、M15、M25和M34。前三個監(jiān)視器位于后視鏡正面,最后一個監(jiān)視器位于后視鏡背面。表1給出了監(jiān)視器位置的坐標。
圖9 使用C-DES模擬Q在處的等值面快照。
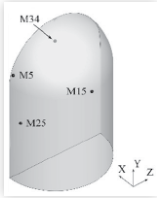
圖10 后視鏡上監(jiān)視器的圖示。監(jiān)視器按照實驗中的順序編號[8,9]。監(jiān)視器M34位于后視鏡的背面。
表1 所選監(jiān)控器的坐標
表2 選定監(jiān)測器的時間平均壓力系數Cp

表2中比較了不同CFD方法給出的以及文獻中報告的〈Cp〉值。與實驗數據相比,DES方法和I-LES在鏡邊附近M5處給出了更大的系數,而C-LES提供了更小的系數。如圖8所示,較低的值與LES比DES在壁面附近呈現更多波動的現象有關。在駐點M15處的數值和實驗結果是一致的。在M25處所有數值方法都低估了系數。該監(jiān)視器位置接近最小剪應力張量。目前使用切割體網格或多面體網格的I-DES方法高估了M34處的系數。這種效應與可壓縮性(與C-DES相比)和邊界層中解決的波動(與C-LES相比)有關。
壓力波動的均方根(rms)值,顯示在圖11中。DES方法得到的輪廓相似。這表明壓縮性和單元拓撲結構的影響并不明顯。然而,用C-LES方法求解的尾跡區(qū)域在翼展方向上比DES方法更寬。這一行為與表1所示的現象一致。因此,C-LES解決了邊界層中更多的壓力波動。由于計算均方根值時考慮的模擬持續(xù)時間有限(0.2秒),等高線是不對稱的。
內部噪音的壓力由位于腔體角落和中心的麥克風收集。麥克風位置如圖12所示。腔中有9個麥克風。麥克風1設置在中心。其余話筒分布在角落。為了簡潔起見,在隨后的分析中選擇1和4。

圖11 使用不同的CfD方法計算壓力波動的標準化均方根值。

圖12 話筒位于腔體內部,話筒編號由圓圈。
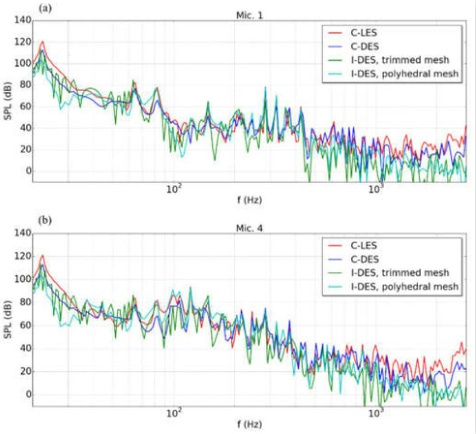
圖13 使用不同的CfD方法計算(a)話筒1和(b)話筒4處的內部噪音頻譜。
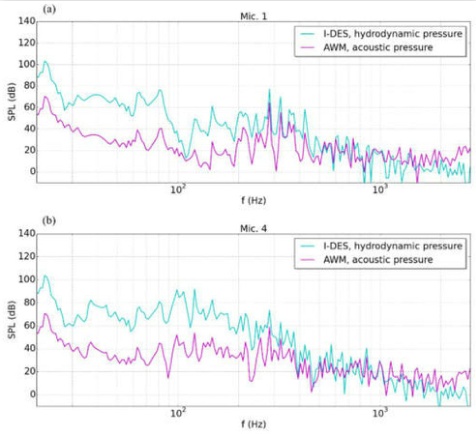
圖14 話筒1(a)和話筒4(b)處內部噪聲的流體動力和聲學部分的頻譜。
圖13顯示了根據不同CFD方法和網格的表面壓力波動預測的聲壓級(SPL)。考慮到需要6個元素才能很好地解析波,當前腔體網格可解析的最大頻率為2267 Hz。這表明高于最大頻率的結果不準確。因此,圖中頻率范圍的上限設置為3000 Hz。所有CFD方法在低于1000Hz的低頻下給出了可比的量級,而在該頻率以上,可壓縮流求解器(C-LES和C-DES)給出的量級比I-DES更大。在I-DES中,未求解聲壓,因此由聲壓引起的內部噪聲不包括在預測中。此外,通過I-DES獲得的由外部水動力壓力引起的內部噪聲在切割體網格和多面體網格之間是一致的。原因是,一旦網格分辨率細化到足以解析流動結構,單元拓撲在水動力壓力模擬中的作用有限。此外,用C-LES預測的振級在高頻時大于C-DES,如圖13所示。根據圖8和圖11,C-LES解決了邊界層和沖擊渦中更多的小尺度波動。波動形成高頻噪聲源。
圖14中繪制了基于多面體網格耦合I-DES和AWM解計算的內部噪聲譜。將車內噪聲分解為兩部分:一部分由外部水動力壓力波動產生,另一部分由外部聲壓波動產生。水動力部分采用僅包括外部水動力壓力的I-DES解進行預測。基于AWM解對聲學部分進行預測。在低頻時,水動力部分的振幅大于聲學部分的振幅。對于1000Hz以上的頻率,聲學部分超過水動力部分。這一觀察結果表明,外部聲壓是產生高頻內部噪聲的主要因素。可壓縮流求解器(C-LES和C-DES)用于獲得可壓縮壓力,包括流體動壓和聲壓,而不可壓縮流求解器(I-DES)僅給出流體動壓。因此,可壓縮流解算器可以預測總的內部噪聲。不可壓縮流解算器提供流體動力學內部噪聲。
如圖13所示,總的車內噪聲在1000Hz以上沒有下降趨勢,通過應用AWM基于不可壓縮流解決方案重建聲壓,發(fā)現這種不下降趨勢是由于內部聲學噪聲造成的,這種噪聲占主導地位,在高頻時不會下降,如圖14所示。雖然使用不同的CFD和CAA方法來模擬氣流和噪聲,但它們預測的總內部噪聲趨勢相似。這一現象與Hartmann等人報告的實驗結果不同,Hartmann等人觀察到了下降趨勢。在他們的實驗中,研究了裝配在帶座艙的通用車輛模型上的真實鏡子。通過使用揚聲器產生外部聲激勵,他們還證明了聲壓在內部噪聲產生中起著重要作用。此外,發(fā)現放大后的后視鏡會產生更大的內部噪音,即使該后視鏡產生的外部壓力與高于250 Hz的基準后視鏡幾乎相同。基于這一效應,他們得出結論,聲壓是導致車內噪聲發(fā)生顯著變化的主要原因。
放大鏡和基準鏡的比較揭示了另一個事實,即外部聲壓大小敏感地取決于鏡的幾何形狀和尺寸。因此,可以理解的是,與Hartmann等人的真實鏡子相比,本研究中的普通鏡子在1000 Hz以上會產生不同的內部噪聲譜。盡管如此,有趣的未來工作將是基于相同的數值和實驗方法在普通反射鏡和哈特曼真實反射鏡之間進行交叉比較,并探索反射鏡幾何形狀對內部噪聲產生的影響。如圖13所示,流體動力車內噪聲與100Hz至1000Hz之間的車內總噪聲相當。根據圖14中觀察到的結果,可以解釋這種現象。低于400 Hz時,水動力車內噪聲比車內噪聲大約20-40 dB。因此,與總的內部噪聲(水動力噪聲和聲學噪聲之和)相比,內部聲學噪聲可以忽略不計。在400至1000 Hz的頻率范圍內,圖13顯示流體動力噪聲的量級略低于總噪聲量級。由于SPL定義中使用了對數刻度,因此添加與400至1000 Hz之間的流體動力噪聲具有類似量級的聲噪聲(見圖14)不會導致總噪聲的顯著量級增加。
6. 結論
本文用數值方法研究了長方體腔中的內部噪聲。車內噪音是由車窗振動產生的,車窗振動由車外氣流和通用側視鏡的氣流誘導噪音激發(fā)。采用先進的CFD和CAA方法(如C-LES、C-DES、I-DES和I-DES)結合AWM對外部流動和噪聲進行了模擬。耦合方法分別模擬外部水動力和聲壓。與DES方法相比,C-LES方法解決了更多的邊界層壓力波動。結果是,在高頻下,用C-LES預測的車內噪聲大于C-DES。結果表明,用C-LES方法得到的尾跡區(qū)的展向寬度比DES方法得到的更寬。通過比較修剪網格和多面體網格的I-DES結果,發(fā)現在網格分辨率得到充分細化的情況下,單元拓撲對水動力壓力解的影響有限。在低頻范圍內,外部水動力壓力是車內噪聲的主要組成部分,而在1000Hz以上,外部聲壓起主導作用。因此,在CFD模擬中應考慮壓縮性,以便進一步預測車內噪聲。但是,如果聲學解算器與其耦合以恢復聲波模擬,則不可壓縮解算器也可以有效。
文獻來源:Yao, H., Davidson, L., and Chroneer, Z., “Investigation of Interior Noise from Generic Side-View Mirror Using Incompressible and Compressible Solvers of DES and LES,” SAE Technical Paper 2018-01-0735, 2018, doi:10.4271/2018-01-0735.
- 下一篇:汽車輪胎氣密性試驗方法
- 上一篇:技術 | 奔騰T77駕乘性能技術解析報告



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統開發(fā)策略將如何
2026-03-03 12:44
-
聯合國法規(guī)R59對機動車備用消聲系統的工程
2026-03-03 12:08
-
聯合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
