




 廣告
廣告





















































首頁 > 汽車測試技術(shù) > 正文
微型電動汽車底部套件降阻實錄
2021-12-03 17:17:11· 來源:汽車CFD技術(shù)之家

本文對某微型電動汽車進(jìn)行了流場仿真分析,對前輪氣壩、后底護(hù)板、電池前導(dǎo)流板等底部套件措施以及去除后視鏡、封閉輪輞、封閉進(jìn)氣格柵等狀態(tài)進(jìn)行了仿真,采用了
本文對某微型電動汽車進(jìn)行了流場仿真分析,對前輪氣壩、后底護(hù)板、電池前導(dǎo)流板等底部套件措施以及去除后視鏡、封閉輪輞、封閉進(jìn)氣格柵等狀態(tài)進(jìn)行了仿真,采用了穩(wěn)態(tài)的雷諾時均k-ω湍流模型和瞬態(tài)的分離渦模擬兩種方法。在風(fēng)洞試驗中,前輪氣壩、電池前導(dǎo)風(fēng)版、后底護(hù)板這三個工程可行的措施能夠降低風(fēng)阻系數(shù)0.019,其它的方案狀態(tài)也有不同的降風(fēng)阻效果。
1 CFD 計算模型
本文采用了STAR-CCM+軟件,分別用穩(wěn)態(tài)的k?ΩSST雷諾時均模型和瞬態(tài)的分離渦SST兩種方法,對該微型電動汽車的基礎(chǔ)狀態(tài)和優(yōu)化方案進(jìn)行了分析。
1.1 網(wǎng)格處理
建立包括前后機(jī)艙內(nèi)所有部件的整車模型,如圖1、圖2所示。該車長2986mm,寬1676mm,高1517mm。整車面網(wǎng)格量約為500萬,采用三角形網(wǎng)格單元劃分,最小網(wǎng)格尺寸控制在1mm。整個長方體計算流場域的尺寸為:66m長、12m寬,10m高。體網(wǎng)格量為3000萬,采用trim網(wǎng)格。最近的邊界層網(wǎng)格厚度0.1mm,邊界層網(wǎng)格總厚度3mm,共6層。
1.2 邊界條件與求解設(shè)定
仿真分析中冷凝器采用多孔介質(zhì)模型;冷卻風(fēng)扇靜止;車輪為壁面旋轉(zhuǎn);模擬工況為車速100km/h,計算域進(jìn)口為速度邊界條件,出口為壓力邊界條件。穩(wěn)態(tài)的計算步數(shù)為10000 步,取后2000 步的平均值為風(fēng)阻系數(shù);瞬態(tài)的時間步長為0.001s,內(nèi)部迭代步數(shù)為10步,取1.0s至1.5s的計算結(jié)果平均值為風(fēng)阻系數(shù)。
2 研究的情形
本文仿真分析了7種情形,分別是基礎(chǔ)狀態(tài)、增加后底護(hù)板、增加電池前導(dǎo)流板、增加前氣壩、拆除后視鏡、封閉輪輻、封閉機(jī)艙格柵。每個情形都進(jìn)行了仿真分析和風(fēng)洞試驗。
2.1 基礎(chǔ)狀態(tài)
該車沒有配置主動進(jìn)氣格柵,氣流能夠進(jìn)入前機(jī)艙,由于工程樣車已經(jīng)帶有前艙的底護(hù)板,故以此作為基礎(chǔ)狀態(tài)。整體外觀的試驗如圖3所示。

2.2 增加后底護(hù)板
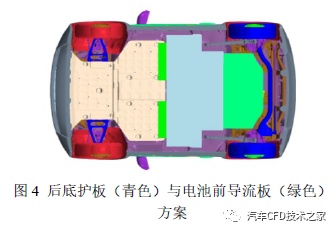
在后機(jī)艙下部增加了帶弧度的表面平滑的底護(hù)板,見圖4。
2.3 增加電池前導(dǎo)流板
在情形二的基礎(chǔ)上,電池包和前底護(hù)板之間的臺階處,z向高度差約16mm,增加2塊斜坡狀的導(dǎo)流板,見圖4。
2.4 增加前氣壩
在情形三的基礎(chǔ)上,在前輪的前部各增加1塊導(dǎo)風(fēng)的平板式的氣壩,見圖6。
2.5 拆除后視鏡
將后視鏡拆除,見圖5,可以評價后視鏡對風(fēng)阻的貢獻(xiàn),以及后續(xù)改款車型如果配置攝像頭式后視鏡的降風(fēng)阻效果。為便于對比,該情形及后續(xù)計算風(fēng)阻系數(shù)時正投影面積保持不變。
2.6 封閉輪輻
用簡單的平面全封閉輪輻,見圖5,可以評估輪輻對該車的降風(fēng)阻貢獻(xiàn)。
2.7 封閉機(jī)艙格柵
用簡單弧面將機(jī)艙格柵屏蔽,見圖6,可以評估機(jī)艙進(jìn)氣對風(fēng)阻的影響,以及后續(xù)改款車型如果配置主動進(jìn)氣格柵的降風(fēng)阻效果。

3 結(jié)果與討論
3.1 基礎(chǔ)狀態(tài)
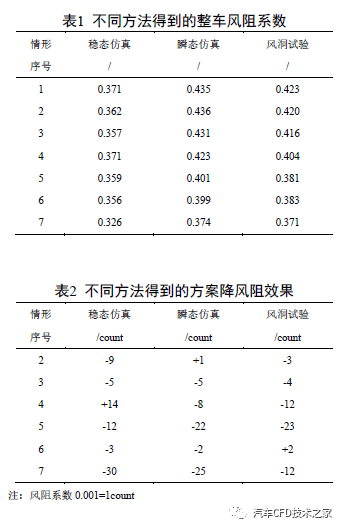
基礎(chǔ)狀態(tài)的風(fēng)阻系數(shù)穩(wěn)態(tài)仿真結(jié)果為0.371,瞬態(tài)仿真結(jié)果為0.435,風(fēng)洞試驗結(jié)果為0.423。通過穩(wěn)態(tài)和瞬態(tài)Y0面的速度云圖的對比,見圖7、圖8,可以看出瞬態(tài)的能夠捕捉更細(xì)小的渦,尤其在車后方的尾渦區(qū),低速區(qū)和高速區(qū)的交界處,由于渦的耗散,流動呈現(xiàn)更多的不規(guī)則性[5]。瞬態(tài)方法能夠?qū)α鲌瞿M得更加細(xì)致應(yīng)該是它比穩(wěn)態(tài)方法更接近試驗結(jié)果的主要原因。

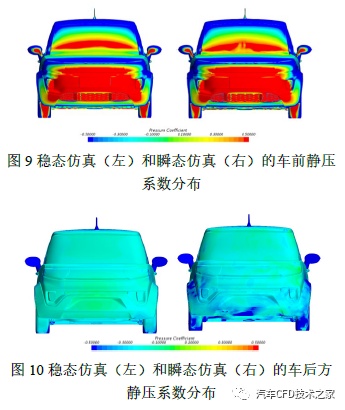
另外,空氣阻力由壓差阻力和粘性阻力兩部分組成。本車的壓差阻力對總阻力占比在95%左右。穩(wěn)態(tài)結(jié)果比瞬態(tài)結(jié)果更低的原因也主要在于壓差阻力的差異,靜壓系數(shù)分布見圖9、圖10,。兩種方法車前方迎風(fēng)面的壓力分布相差不大,車后方的背風(fēng)面的壓力,瞬態(tài)結(jié)果明顯低于穩(wěn)態(tài)結(jié)果,有更多的負(fù)壓,從而產(chǎn)生了更大的風(fēng)阻。
3.2 增加后底護(hù)板
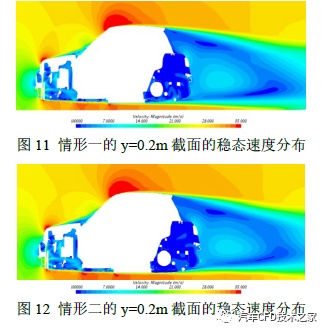
該狀態(tài)的風(fēng)阻系數(shù)穩(wěn)態(tài)仿真結(jié)果為0.362,瞬態(tài)仿真結(jié)果為0.436,風(fēng)洞試驗結(jié)果為0.420。這個方案相對于改變前,風(fēng)阻系數(shù)的試驗結(jié)果和穩(wěn)態(tài)仿真結(jié)果都是降低的,瞬態(tài)結(jié)果反而增加一點。通過穩(wěn)態(tài)流場的對比,見圖11、圖12,可以看出增加后底護(hù)板后,車底氣流有了一定上揚的趨勢,從而減小了車后尾渦區(qū)的大小,這可能是風(fēng)阻降低的原因。
3.3 增加電池前導(dǎo)流板
該狀態(tài)的風(fēng)阻系數(shù)穩(wěn)態(tài)仿真結(jié)果為0.357,瞬態(tài)仿真結(jié)果為0.431,風(fēng)洞試驗結(jié)果為0.416。這個方案的風(fēng)阻系數(shù)試驗和仿真結(jié)果都是降低的,從壓力分布看,電池前邊緣的正壓在增加這個導(dǎo)流板后消失了,見圖13。
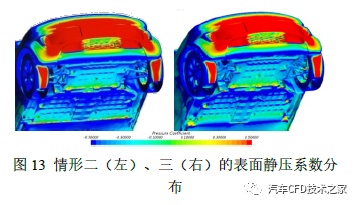
3.4 增加前氣壩
該狀態(tài)風(fēng)阻系數(shù)穩(wěn)態(tài)仿真結(jié)果為0.371,瞬態(tài)仿真結(jié)果為0.423,風(fēng)洞試驗結(jié)果為0.404。相比于情形三,該方案試驗降阻-0.012,瞬態(tài)降阻-0.008,從瞬態(tài)仿真的壓力分布對比圖13,14看出,增加氣壩后,前輪腔內(nèi)的懸架、車輪內(nèi)壁等的迎風(fēng)面的正壓有明顯降低,應(yīng)該是風(fēng)阻降低的主要原因。穩(wěn)態(tài)結(jié)果風(fēng)阻反而增加+0.014,可能是由于穩(wěn)態(tài)仿真對于氣流在氣壩分離之后的壓力捕捉不如瞬態(tài)準(zhǔn)確。

3.5 拆除后視鏡
基礎(chǔ)狀態(tài)的風(fēng)阻系數(shù)穩(wěn)態(tài)仿真結(jié)果為0.359,瞬態(tài)仿真結(jié)果為0.401,風(fēng)洞試驗結(jié)果為0.381。瞬態(tài)仿真的降阻更加接近試驗,可能也是由于瞬態(tài)流場對于后視鏡尾渦和車后部尾渦的相互作用捕捉得更準(zhǔn)確,見圖15、圖16。

3.6 封閉輪輻
基礎(chǔ)狀態(tài)的風(fēng)阻系數(shù)穩(wěn)態(tài)仿真結(jié)果為0.356,瞬態(tài)仿真結(jié)果為0.399,風(fēng)洞試驗結(jié)果為0.383。試驗結(jié)果是增加的,仿真結(jié)果均是降低的。仿真上看,輪輞封閉后,氣流在平整的輪輞處更加貼體,見圖17、圖18。這可能是仿真結(jié)果降低的原因,隨后氣流依然由于慣性向車兩側(cè)甩開。由于車輪的計算邊界條件旋轉(zhuǎn)壁面設(shè)定以及幾何結(jié)構(gòu)和實際車輛一定的差異,本文的穩(wěn)態(tài)和瞬態(tài)仿真均難以模擬試驗中輪輞封閉的阻力變化。

3.7 封閉機(jī)艙格柵
基礎(chǔ)狀態(tài)的風(fēng)阻系數(shù)穩(wěn)態(tài)仿真結(jié)果為0.326,瞬態(tài)仿真結(jié)果為0.374,風(fēng)洞試驗結(jié)果為0.371。由于封閉前格柵,氣流從車四周更順暢地流走,而不是在前機(jī)艙內(nèi)受到各種部件的阻礙曲折地流走,見圖19,從而引起風(fēng)阻系數(shù)的降低。

將不同方法得到的風(fēng)阻系數(shù)和降阻效果進(jìn)行對比,見表1和表2。本微型純電動汽車風(fēng)阻系數(shù)的穩(wěn)態(tài)仿真值和試驗值平均偏差為10.5%,瞬態(tài)仿真值和試驗值平均偏差為3.6%,瞬態(tài)仿真結(jié)果更接近試驗結(jié)果。風(fēng)洞試驗依然是風(fēng)阻開發(fā)中必不可少的。
4 結(jié) 論
本文對某微型電動汽車進(jìn)行了流場仿真分析和風(fēng)洞試驗。仿真顯示該微型電動汽車的尾渦大,更具有鈍體的特點,因而風(fēng)阻較高,風(fēng)阻系數(shù)試驗值在0.4以上的水平。本文采用的瞬態(tài)分離渦方法相比于穩(wěn)態(tài)雷諾時均方法,計算的風(fēng)阻系數(shù)總體上更接近試驗值。前輪氣壩、后底護(hù)板、電池前導(dǎo)流板等底部套件能夠降低風(fēng)阻系數(shù)0.019,取消后視鏡及格柵封閉等前瞻方案能夠降低風(fēng)阻系數(shù)約0.03。微型電動汽車的底部套件能夠顯著降低風(fēng)阻。
(引自:李喆隆1,李濤1,李現(xiàn)今1→某微型電動汽車底部套件風(fēng)阻特性研究)



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
