




 廣告
廣告





















































混合自治交通流中的交通信號配時與軌跡優(yōu)化
2021-12-07 20:35:08· 來源:同濟智能汽車研究所

編者按:信號配時和軌跡優(yōu)化(STTO)問題非常復雜,需要開發(fā)算法。以前的研究表明,在計算效率和解決方案性能之間存在一種權衡,其中更高效的算法與更簡化的假設
編者按:信號配時和軌跡優(yōu)化(STTO)問題非常復雜,需要開發(fā)算法。以前的研究表明,在計算效率和解決方案性能之間存在一種權衡,其中更高效的算法與更簡化的假設相關。本文的貢獻有三個方面:1)本研究引入了一種解決方案技術,它在計算效率和解決方案性能之間提供了平衡:它在不顯著犧牲解決方案性能的情況下降低了STTO的計算復雜性。作者通過使用拉格朗日松弛法將STTO問題分解為多個車道級優(yōu)化子問題,開發(fā)有效的解決方案實現(xiàn)了這一平衡。因此,可以分析不同布局和不同需求水平的交叉口;2) 作者縮小了拉格朗日松弛法的最優(yōu)性差距,使其找到的解接近最優(yōu)解。改進了拉格朗日松弛法在求解STTO問題時的收斂性,保證了在減少對偶間隙的情況下有效地找到近似最優(yōu)解;3)所提出的算法不需要以下簡化假設:a)所有自動化車輛的車隊,b)強制車輛排成一列移動,c)以所需速度到達交叉口d)紅色相位期間交叉口不存在初始隊列。因此,可以在具有不同CAV市場滲透率的混合自治環(huán)境中研究CAV聯(lián)合信號配時和軌跡優(yōu)化的效果。仿真結果表明,該方法具有較高計算效率和更好的性能。
本文譯自:
《TrafficSignal Timing and Trajectory Optimization in a Mixed Autonomy Traffic Stream》
文章來源:
IEEE Transactions on Intelligent Transportation Systems, 2021
作者:
Mehrdad Tajalli,Ali Hajbabaie
原文鏈接:
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9357468
摘要:本研究介紹了一種在網(wǎng)聯(lián)自動駕駛車輛(CAVs)和人駕駛車輛(HVs)混合的交叉口信號配時和軌跡優(yōu)化方法。我們將把信號配時和軌跡控制聯(lián)合表示為一個計算復雜的混合整數(shù)非線性規(guī)劃問題。所開發(fā)的方法通過(a)將非線性約束線性化,并用混合整數(shù)解的緊凸殼重新表述問題;(b)將交叉口級別方案分解為多個車道級別方案,從而在計算效率和解決方案質量之間取得平衡。因此,每個單獨的控制器聯(lián)合優(yōu)化車道上CAVs的軌跡以及與該車道相關的信號配時參數(shù)。此設置將允許為具有不同需求級別的復雜交叉口找到具有較小對偶間隙的近似最優(yōu)解決方案。案例研究結果表明,該方法在不超過0.1%的對偶間隙下能有效地找到問題的解。我們將開發(fā)的方法與現(xiàn)有的信號配時和軌跡控制方法進行了比較,發(fā)現(xiàn)在不同情況下,平均行程時間減少了13%至41%,燃油消耗量減少了1%至31%。
關鍵詞:信號配時與軌跡優(yōu)化(STTO),網(wǎng)聯(lián)自動駕駛車輛(CAV),人駕駛車輛(HV),拉格朗日松弛原理(LR),混合整數(shù)非線性規(guī)劃(MINLP)
1 引言
最近的研究表明,網(wǎng)聯(lián)自動駕駛車輛(CAVs)的軌跡優(yōu)化和交叉口信號燈配時優(yōu)化可以明顯改善交通運行[1]-[5]。CAVs的軌跡和信號配時優(yōu)化有助于更準確地規(guī)劃車輛到達交叉口的時間,以更有效地利用綠燈持續(xù)時間。因此,交叉口的停車次數(shù)、車輛油耗和行駛延誤將顯著減少。然而,信號控制器和接近車輛之間的合作需要大量的通信和計算能力[6]。信號控制器不可能處理所有需要的計算。事實上,以前的研究表明信號配時和軌跡優(yōu)化的有效性在如下幾種情況:a)在布局簡單的交叉口(例如,單行道[2],[7]或無轉彎運動[8]),(b)在低交通量[2],[7]-[9]下,或(c)使用簡化或限制性假設(例如,使用一階交通流模型來更新CAVs的軌跡 [4]、[10]或優(yōu)化部分CAVs的軌跡 [1])。近似方法和啟發(fā)式算法也用于解決更復雜條件下的問題;然而,確以犧牲解決方案的性能為代價[11],[12]。
圖1 與CAV和HV交互的信號控制器
本文提出了一種在信號交叉口進行CAVs軌跡優(yōu)化和信號配時優(yōu)化聯(lián)合的方法,該方法在計算效率和解決方案性能之間取得了平衡。如圖1所示,該方法設計用于CAVs和HVs的混合交通流,其中CAV的移動由中央控制,并通過信號交叉口的車輛到基礎設施通信系統(tǒng)與之通信。該方法要求已知交叉口附近所有車輛(CAV和HVs)的初始位置和速度,并使用跟車概念預測規(guī)劃范圍內HVs的位置。HVs的運動沒有得到優(yōu)化。我們假設所有車輛都連接在一起(只是為了收集車輛位置和速度),或者交叉口配備了能夠提供車輛位置和速度的探測器(例如雷達裝置或攝像機)。請注意,如果HVs不向信號控制器發(fā)送信息,只要檢測器可用于收集所需數(shù)據(jù),建議的算法就可以工作。本研究將聯(lián)合優(yōu)化描述為一個混合整數(shù)非線性規(guī)劃問題,其目標是減少交叉口處車輛的總行程時間和車輛間速度差異。決策變量是CAVs的加速率和信號定時參數(shù)。采用由Helly開發(fā)的線性跟馳模型將HVs和CAVs之間的相互作用納入優(yōu)化問題[13]。我們修改了線性模型,通過加入信號定時參數(shù)使其對交通信號燈做出響應。信號定時參數(shù)通過無周期和無相位計劃進行優(yōu)化,該計劃除黃色時間間隔外,還滿足最小和最大綠色時間約束。信號配時和軌跡優(yōu)化(STTO)問題非常復雜,尤其是在有人駕駛車輛的情況下,需要開發(fā)計算效率高的算法來找到近似最優(yōu)解。以前的研究表明,在計算效率和結果的最優(yōu)性之間存在著平衡關系。本研究引入了一種解決方案,利用拉格朗日松弛技術將交叉口信號配時和軌跡優(yōu)化問題分解為幾個車道級優(yōu)化子問題,從而降低STTO問題的復雜性,其中,控制器分別優(yōu)化交叉口每條車道上的信號配時參數(shù)和CAVs的軌跡。因此,STTO可以擴展到具有高需求水平的更復雜交叉口布局。此外,還提出了一種用于收緊混合整數(shù)可行域凸包的基于交叉口沖突域圖的最大團集的問題重新表述方法,提高拉格朗日松弛技術的收斂性,從而減小最優(yōu)性差距。通過交叉口所有控制器之間的協(xié)商過程,找到接近最優(yōu)的交叉口信號配時參數(shù)和CAVs軌跡。此外,我們提出了一個簡單的優(yōu)化問題,為信號配時計劃提供了一個可行的解決方案。因此,在沒有上述限制性假設的情況下,找到可行且高質量的解決方案是可能的。
在本文的剩余部分,將回顧相關文獻,接下來將討論問題公式。然后,詳細介紹了求解技術,包括問題的重新表述和拉格朗日松弛技術。接下來將提供將所提出的算法應用于案例研究的結果,最后給出結論。
2 背景
A.交叉口的軌跡規(guī)劃
利用先進的信號相位和配時(SPaT)信息優(yōu)化信號交叉口的CAVs軌跡,可提高交通安全性、機動性和燃油消耗率[14]–[17]。美國國家公路交通安全管理局(NHTSA)報告稱,SPaT廣播能夠將闖紅燈次數(shù)和能耗分別減少90%和35%[18]。此外,可以規(guī)劃車輛軌跡,以避免在交叉口停車并最大限度地減少燃油消耗。Xiaet al.[19]表明,通過在固定時間信號交叉口進行建議速度系統(tǒng)試驗,可以降低14%的油耗。Weiet al.[20]表明,優(yōu)化接近信號交叉口的排中領先車輛的軌跡可以有效地管理交通擁堵并增加交叉口的通行能力。當所有車輛都是自動駕駛車輛時,在無信號交叉口控制CAVs的軌跡,可提供機會實現(xiàn)交叉口的最高通行能力,同時通過防止車輛之間的碰撞來保持安全[21]–[24]。例如,Mirheliet等人[25]表明,與優(yōu)化的全驅動信號定時計劃相比,在無信號交叉口100%CAVs的總行程時間減少到70.5%。
B.軌跡和信號配時優(yōu)化
Liet al.[7]提出單行道交叉口上CAVs的信號配時和軌跡優(yōu)化方案,假設所有車輛完全連接,并將遵循指定的最佳軌跡。他們列舉了所有可能的信號定時計劃和每個CAVs的優(yōu)化軌跡,目標是最小化平均延誤。他們提出的方法與優(yōu)化的全驅動信號定時計劃相比將平均延誤減少到36.9%,并將吞吐量提高到20.2%。由于需要列舉所有可能的信號配時計劃,該方法不適用于更復雜的交叉口。Junget al.[8]開發(fā)了一個雙層優(yōu)化方法,用于在一個簡單的十字交叉口(每個方向只有一條直達路段,交通流中只有CAVs)處查找交通信號定時參數(shù)和CAVs軌跡?;谲囕v到達交叉口的估計時間,窮舉搜索法在上層找到了最低交叉口延誤。然后,遺傳算法在下層確定以最小化總油耗為目標的CAVs的軌跡。通過這項研究,車輛行駛時間和燃油消耗量分別減少了12%和10%。窮舉搜索和遺傳算法的結合可能不足以有效地解決復雜的優(yōu)化問題。類似地,Yangetal.[2]使用分支定界技術在具有兩條單向街道的隔離交叉口處尋找信號配時參數(shù)。本研究考慮了三種類型的車輛,包括具有不同市場滲透率的傳統(tǒng)車輛、網(wǎng)聯(lián)人工駕駛車輛以及網(wǎng)聯(lián)自動化車輛。在上層,根據(jù)估計的車輛到達時間最小化交叉口總延誤。針對每個信號配時計劃,在下層問題中對CAVs的軌跡進行了優(yōu)化,以最大化其進入交叉口的速度。本研究假設每個排長都是CAVs,排長總是在綠色信號燈未亮時到達交叉口。對于交通量大的復雜交叉口,該算法可能效率不高,因為需要針對分支定界算法確定的每一組信號配時參數(shù)對軌跡進行優(yōu)化。Xuet al.[9]開發(fā)了一個雙層優(yōu)化方法,以最小化上層的總行駛時間,并最小化下層每輛車的燃油消耗。通過枚舉找到信號配時計劃。然后,通過使用插值多項式函數(shù)逼近狀態(tài)變量和控制變量,找到每個方案的最優(yōu)車輛軌跡。Pourmehrabet al.[26]提出了一種基于車輛到達時間調整現(xiàn)有信號配時計劃的方法,以最大限度地利用綠燈時間。此外,對領隊自動駕駛車輛的行駛軌跡進行優(yōu)化,以最大限度地減少行程時間延遲。然而,本研究主要關注信號配時計劃的可行性,而不是其最優(yōu)性(根據(jù)一組定義的規(guī)則調整信號配時參數(shù),以找到與優(yōu)化軌跡的可行協(xié)調)。信號定時控制策略是將信號延長或反復切換到另一個相位,直到找到一個能提供綠燈到達的組合。相比之下,我們提出的方法聯(lián)合優(yōu)化信號配時參數(shù)和車輛軌跡,從而提高交通運行效率。當交叉口布局復雜、相位數(shù)量增加或需求水平較高時,如先前研究中所述的枚舉方法變得無效。因此,一些研究提出了啟發(fā)式方法或考慮簡化假設,以有效地解決信號配時和軌跡優(yōu)化問題。例如,F(xiàn)eng et al.[27]開發(fā)了一種信號配時和排隊CAVs軌跡的聯(lián)合優(yōu)化方法。他們將信號相位分為幾個階段,并使用動態(tài)規(guī)劃方法來找到每個階段的信號配時參數(shù)。該方法假設排長恰好在綠燈時間間隔開始時到達交叉口停車線,可以解析地找到最優(yōu)解。然而,這種假設可能會限制動態(tài)規(guī)劃框架中信號配時計劃的選擇,特別是當排長不是CAVs時。此外,由于研究顯示了交通量非常低的簡單場景的性能結果,因此建議的方法對高交通量的有效性尚不清楚。研究結果表明,排長對信號配時和軌跡的聯(lián)合優(yōu)化可將車輛延誤和二氧化碳排放分別減少24%和13.8%。Guo等人[3]提出了一種兩步優(yōu)化信號配時和CAVs軌跡的方法。在第一步中,找到了使交叉口延誤最小化的信號配時參數(shù)。在第二步中,為計劃的信號定時設計了最佳軌跡。通過動態(tài)規(guī)劃找到信號配時參數(shù),并通過射擊啟發(fā)式迭代評估每個信號配時計劃對軌跡的影響。射擊啟發(fā)式被證明可以估計CAVs的高性能軌跡。然而,這種方法的可行性僅限于路段長度足以讓車輛選擇適當機動的交叉口。此外,交叉口長隊的存在會導致通過射擊啟發(fā)式尋找不可行解。Yuet等人[1]優(yōu)化了信號配時參數(shù),如相序、綠燈啟動時間、每個相位的持續(xù)時間以及隔離交叉口的周期長度。此外,他們還優(yōu)化了車輛到達時間,以及在具有直行、右轉和左轉運動的十字交叉口中的換道策略。本研究利用規(guī)劃地平線程序來解決混合整數(shù)線性規(guī)劃(MILP)問題。然而,它假設(1)所有車輛都是CAVs,(2)在同一周期內通過交叉口的同一車道上的車輛都在同一排。因此,他們只優(yōu)化了領頭車輛的軌跡(到達時間),其他跟隨車輛使用跟車模型跟隨領頭車輛。此外,他們假設所有車輛以期望的速度到達交叉口,且交叉口不存在排隊。這些假設限制了該方法在低CAVs市場滲透率水平上的應用。Liet al.[28]結合具有多個交叉口的主干道的信號配時計劃,優(yōu)化電動車輛的軌跡。本研究的目的是通過優(yōu)化信號配時來最小化交通延誤,并通過優(yōu)化電動汽車的軌跡來節(jié)約能源。為了解決這一復雜的優(yōu)化問題,采用了遺傳算法和粒子群算法相結合的混合啟發(fā)式技術來生成可行的信號配時計劃,從而評估該信號的最優(yōu)軌跡。該研究通過從每個車輛的角度考慮最優(yōu)軌跡,而不考慮車輛之間的協(xié)調,從而降低了問題的復雜性。因此,該解決方案可能無法提高系統(tǒng)級性能。Li和Zhou[4]優(yōu)化了CAVs在與人駕駛車輛混合環(huán)境中的信號配時和軌跡。他們通過在相位時間交通超網(wǎng)絡中表示交通動態(tài)和信號定時約束來降低問題的復雜性。然而,這種表示需要一階異構流量模型。雖然他們提出的方法允許研究大規(guī)模網(wǎng)絡,但其操作精度不如我們研究中使用跟車模型的模型精度高。當考慮二階交通流或微觀跟馳模型時,相位時間交通超網(wǎng)絡方法的性能不明確,問題的復雜性將顯著增加。在一項類似的研究中,Liet al.[10]使用拉格朗日松弛技術來解決交通網(wǎng)絡中的信號定時和路由問題。拉格朗日松弛法用于松弛鏈路容量約束,并將優(yōu)化程序分解為路由引導和信號優(yōu)化子問題。然而,優(yōu)化車輛路徑不同于軌跡優(yōu)化,因為路徑優(yōu)化不會在短時間間隔內控制車輛的位置。盡管拉格朗日松弛技術降低了所提出問題的復雜性,但本研究中報告的最優(yōu)性差距高達30%,這導致了次優(yōu)解。
3 問題表述
本研究協(xié)同優(yōu)化了所有CAVs的軌跡和信號配時參數(shù)。假設基礎設施通過雷達裝置、視頻探測器或連接性知道人類駕駛車輛的初始位置和速度。我們定義L為交叉口所有車道的集合,I為交叉口附近所有車輛的集合。此外,
、
和

分別表示表示車道
上所有車輛、CAVs和HVs的集合, 我們將

定義為與車道

沖突的所有車道的集合。圖2展示了孤立交叉點中的定義集。

圖2 STTO問題中定義的集合和參數(shù)
我們分別將

和

定義為信號配時和軌跡優(yōu)化時間步長集。請注意,車輛軌跡和信號正時更新時間步長(

和

)是不同的。軌跡更新的頻率高于信號配時參數(shù)更新的頻率,以考慮駕駛員行為的不確定性,并捕捉預測和實際車輛軌跡之間的任何差異。方程式(1)顯示了這兩個時間步之間的關系。

運算符表示對其中相應的參數(shù)進行取整。

信號配時的狀態(tài)變量,包括在車道
上的綠燈時間

、黃燈時間

和時間步長

,將根據(jù)在時間戳
時接近交叉口車道

的車輛

的位置
和速度

信息進行優(yōu)化。車輛
在時間戳
的加速率

也是CAVs運動規(guī)劃中的控
制變量。表1提供問題表達中使用的變量、集合和參數(shù)的詳細定義。
表1 集合、決策變量和參數(shù)的定義

A. 目標函數(shù)
STTO的目標函數(shù)如(2)所示,
包含兩項第一項使每輛車距車道
起點的距離最大化,車輛
位于圖2所示位置[29],[30]。對于位于車道
的車輛
,位置權重因子

乘以目標函數(shù)的第一項,以避免不斷為需求較高的引道提供服務,并防止交叉口次要方向的排隊。我們將該權重的值設置為每輛車進入交叉口附近后經(jīng)歷的當前延誤(即自由流行駛時間減去實際行駛時間)。因此,在經(jīng)歷較多延誤的車道上,車輛將被分配更高的優(yōu)先級。請注意,權重因子在規(guī)劃范圍內是固定的。目標函數(shù)的第二項通過最小化兩個連續(xù)時間步之間每個CAVs的速度差來平滑CAVs的運動。Tajalli和Hajbabaie[14]表明,將速度差降至最低會使交叉口的停車次數(shù)減少。權重因子
是優(yōu)化方案的輸入,以在目標函數(shù)的兩項之間提供所需的平衡。β值越高,目標函數(shù)的第一項優(yōu)先級越高,β值越低,目標函數(shù)的第二項優(yōu)先級越高。
B. 約束
車輛的速度和位置根據(jù)基本運動方程更新,如約束條件(3)和(4)所示

1)車輛跟馳約束:
需要估計HVs的位置和速度,以優(yōu)化信號配時參數(shù)和CAVs的軌跡。因此,根據(jù)車輛跟馳行為預測HVs的未來軌跡。本研究考慮了Helly(1959)開發(fā)的線性跟馳模型。該跟馳模型用于建模自適應和協(xié)作自適應巡航控制系統(tǒng)[31],[32]。此外,Panwai和Dia(2005)表明Helly的跟馳模型與現(xiàn)實世界的交通數(shù)據(jù)具有適當?shù)臄M合。雖然人類駕駛的本質是隨機的,但確定性跟馳模型在我們的方法中適用,原因是車輛的初始位置每0.5s從網(wǎng)絡中觀察一次,這一部分將在方法學部分解釋。在此跟馳模型中,跟車者對相對速度和與前面車輛的距離做出響應,有關加速率的計算公式見公式(5)。參數(shù)α1和α2是固定的,具有正值,應分別在[0.17,1.3]和[1/4α1,1/2α1]的范圍內[34],[35]。
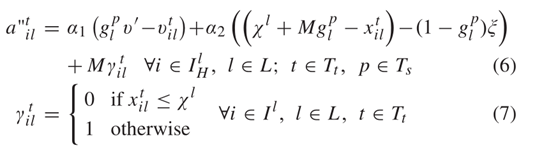
方程式(5)中的第一項考慮了領先和跟隨車輛之間的相對速度。正速度差(即先導以更高的速度行駛)導致從動件的正加速度,而負速度差迫使從動件減速。第二項考慮了連續(xù)車輛之間的相對距離。我們增強了跟車模型,以考慮交通信號,使車輛在接近紅色信號時減速。交通信號燈被視為一個虛擬車輛,停車桿處的速度為零(對于紅色信號燈),或交叉口處的最大速度(對于綠色信號燈)。方程式(6)顯示了接近停車桿時車輛加速度是如何更新的。請注意,當信號為紅色,虛擬停止車輛位于交叉口停車桿處,車輛與交叉口停車桿之間應有理想的安全距離ξ。但是,當交通燈為綠色時,前面虛擬車輛的位置將變?yōu)榕c后面車輛的距離較遠,并且與交叉口停車桿的期望安全距離將減小為零。此外,應注意的是,僅當車輛位于交叉口停車線之前時,即

,才需要建立車輛和交通燈之間的連接。方程式(6)應在CAV通過交叉口后變?yōu)榉腔顒訝顟B(tài)。當信號燈為綠色時,將信號配時變量

與大系數(shù)M相乘。方程(6)的第二項將虛擬車輛移動到距離后續(xù)車輛很遠的位置。因此,車輛不再對其作出反應。方程式(6)中引入的二進制變量

,用于在交通燈和車輛通過交叉口停車線后
解除它們之間的聯(lián)系,當車輛位于交叉口停車線上游時
變?yōu)榱?,當車輛通過交叉口停車線時
變?yōu)?。如方程(7)所示
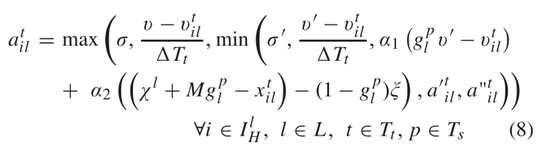
方程式(5)和(6)所示的線性跟馳模型不會將加速度和速度限制在最小值和最大值之間。因此,我們建立了基于最大-最小值函數(shù)的跟車模型,如等式(8)所示。該公式是所提出的跟馳模型的完整形式,該模型描述了諸如在自由流條件下移動、在靜止和非靜止條件下跟隨其他車輛、接近慢速或靜止車輛以及紅色信號等情況。
2)CAV運動約束:
目標函數(shù)(2)平滑CAVs的軌跡,以防止在交叉口頻繁停車。約束(9)確保CAV與前車之間的安全距離。兩輛連續(xù)車輛之間的距離是期望安全距離ξ、平均車輛長度
和在后續(xù)車輛反應時間內可通過的距離
的函數(shù)。參數(shù)

表示CAVs的反應時間。
當信號燈不是綠色時,約束(10)用于防止CAV進入交叉口區(qū)域。當CAV未到達交叉口且信號燈為紅色時,車輛與交叉口停車線之間的距離應大于或等于安全距離,如約束(10)所示。

約束條件(11)和(12)分別將CAVs的加速度和速度限制在允許范圍內。

3)信號時長約束:
假設信號定時是無周期和無相位的;但是,僅限于非沖突運動。例如,圖3顯示了北行和南行引道的所有允許移動。我們假設直行和右轉可以在同一車道上行駛??紤]了幾個約束條件,以防止車輛在沖突運動中發(fā)生碰撞。
圖3 北向和南向通道的允許動作
約束條件(13)確保在時間步長

時,沒有一對沖突的運動能夠接收到非紅色交通燈。

約束條件(14)確保分配給車道的綠燈時間小于或等于最大綠燈時間。約束條件(15)確保車道組的綠燈持續(xù)時間大于或等于最小綠燈時間。

約束(16)定義黃色時間的持續(xù)時間,約束(17)確保信號在綠色時間間隔結束時從綠色切換為黃色。參數(shù)y是黃色的時間間隔。約束(18)確保信號定時變量的完整性。

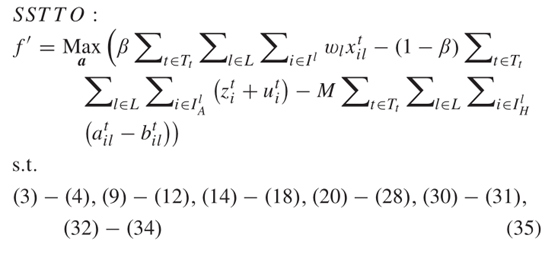
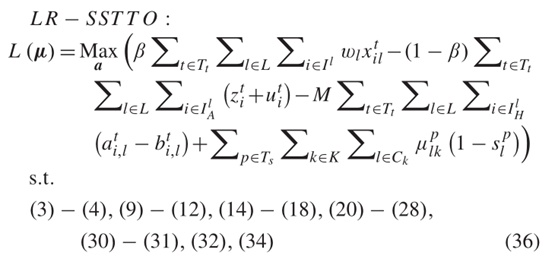
綜上所述,信號配時和軌跡優(yōu)化可以表示成如下形式
4 方法
該公式是一個混合整數(shù)非線性規(guī)劃。由于存在非線性約束和二元變量,該優(yōu)化程序難以有效求解。我們首先將目標函數(shù)(2)、跟車模型(8)和條件約束線性化,以降低所提出公式的計算復雜性。我們使用拉格朗日松弛技術將交叉層問題分解為幾個車道級子問題,降低了計算復雜度,并且可以為每個問題分配一個控制器??刂破鲗⑼ㄟ^共享拉格朗日因子,就信號定時參數(shù)和CAVs軌跡達成共識,以確保在滿足沖突避免約束(13)時找到接近最優(yōu)的解決方案。
A. 線性化
目標函數(shù)(2)的第二項包含一個絕對值函數(shù),它是凸但非線性的。我們?yōu)槊枯v車引入兩個輔助非負變量
和
使絕對值函數(shù)線性化。將約束(20)和(21)添加到原始問題中,以強制
和
的差值等于絕對值函數(shù)中的項。目標函數(shù)(2)的線性形式如(19)所示,其中輔助變量之和最小化。

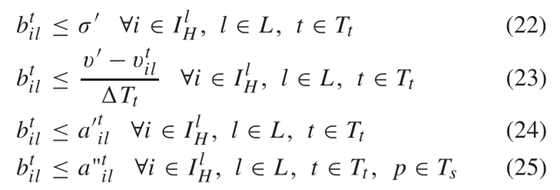
由于存在max-min函數(shù),約束(8)是非線性的。我們通過將等式約束轉化為幾個不等式,并在目標函數(shù)中添加懲罰項來提供這些約束的線性形式。如約束(22)-(25)所示,約束(8)的最小部分由小于或等于的不等式表示
約束(26)-(27)解除函數(shù)(8)的最大部分,該部分由大于或等于不等式表示。約束條件(28)確保

大于或等于松弛最小值函數(shù)的

。
建議的線性化(22)-(28)是松散的,不能等價地表示(8)的最大-最小形式。為了解決這個問題,我們對
的非負差異在目標函數(shù)中加大的懲罰系數(shù)M。新的目標函數(shù)如(29)所示。

B. 拉格朗日松弛
前一節(jié)中描述的線性化技術將混合整數(shù)非線性問題(MINLP)轉化為混合整數(shù)線性問題(MILP)。雖然這種轉換降低了問題的復雜性,但整數(shù)信號定時和其他變量的存在使得問題仍然難以解決。我們開發(fā)了一種拉格朗日松弛技術,該技術將問題分解為幾個車道級優(yōu)化子問題,其中,交叉口每個車道上的最佳信號配時和車輛軌跡分別并行求解。然而,拉格朗日松弛可能對MILP不具有強對偶性[36],[37]。因此,我們用一個優(yōu)越的解空間結構來重新構造問題,以克服這個問題。然后,引入一個簡單的優(yōu)化問題,以確保信號配時計劃的可行解。

圖4 四通道的交叉口沖突圖,有通過和左轉的動作
1)問題重新表述:
成對約束(13)是車道之間唯一常見的約束,可防止沖突運動同時接收非紅色燈信號。解除這些約束并使用拉格朗日因子將其添加到目標函數(shù)中,將導致車道級別分解。拉格朗日松弛法為基于弱對偶理論的非凸信號配時和軌跡優(yōu)化問題的最優(yōu)解提供了一個上界。由于成對約束的弱結構,由成對約束提供的可行凸多面體具有非整數(shù)極值點[38]。換句話說,與成對約束相關的約束太多(13),因此在大多數(shù)情況下,連續(xù)線性松弛包含許多分數(shù)[38]。因此,無法保證拉格朗日松弛收斂到具有非零對偶間隙的期望整數(shù)解[37]。找到定義整數(shù)解的凸包的超平面,除了滿足成對約束外,還有助于克服松弛后尋找不可行解的困難。
當且僅當一對二進制節(jié)點中的兩個節(jié)點
不能同時選擇時(如兩個相互沖突的運動),成對沖突約束(13)可以由包含邊

的無向沖突圖

表示。換句話說,當兩個二進制節(jié)點中最多有一個的值是MILP的解時,E是兩個二進制節(jié)點之間的邊。圖4顯示了具有四個引道和八條車道的交叉口的沖突圖,其中包含直行和左轉運動。圖中的節(jié)點是與車道
相關聯(lián)的信號頭,每一條邊代表一對由(13)表示的成對沖突約束。
圖4所示的圖表示只有左轉運動和直行運動交叉口處的所有沖突,假設右轉運動與直行運動一起操作。成對沖突約束(13)是一組更強大的約束的特例,稱為派系[39]。派系是一組相互沖突的運動,在這項研究中,最多有一個派系在同一時間可以收到非紅色信號。
我們定義
作為沖突圖G中相互連接的節(jié)點集,K是所有可能派系的集合,
代表集團k的所有成員, 其中每個成員在圖G中相互連接,為了在k中設置
,要求所有潛在節(jié)點
可以通過圖G的邊相互連接,例如,

是圖4所示的交叉點的一個小團體,因為8,6和7之間的運動中最多有一個可以得到非紅色信號。不同運動之間的多個成對約束(13)可以在一個派系中表示。因此,可以定義一組完整的派系約束,這些約束使用較少數(shù)量的約束施加所有邊限制。我們將最大派系定義為不能通過添加任何附加節(jié)點來擴大的派系。我們定義
為綠燈
和黃燈
的總和。這是二進制的,因為綠色和黃色信號定時狀態(tài)中最多有一個值為1,請參見約束(32)-(34)。
只包括左轉運動的交叉口圖不能具有大于4的派系。因此,任何規(guī)模為4的派系都是最大派系。此外,可以確認交叉口沖突圖中的最大派系保持所有必要的限制,以防止兩個沖突運動同時接收非紅色信號。此外,大小為4的最大系是成對約束(13)[40]中所有可行區(qū)域的凸包的面定義。因此,可行凸包被收緊,松弛約束的數(shù)量顯著減少。因此,在拉格朗日松弛問題中,對偶間隙減小。
2)簡化STTO和相應的對偶公式:
如前一節(jié)所述,將約束(13)替換為約束(32)-(34),以實現(xiàn)簡化STTO(SSTTO),如下所示。
解除復雜約束(33)將SSTTO問題分解為車道級子問題。因此,拉格朗日問題是通過對偶派系約束(33)得到的,如下所示

是屬于派系
車道

的拉格朗日乘數(shù)因子,向量μ定義為所有拉格朗日乘數(shù)的向量。由于目標函數(shù)和LR問題的剩余約束在車道上是可分離的,每個車道

的子問題當雙乘因子μ已知時,可單獨并行求解。對偶可行點μ處的對偶函數(shù)
的值始終是最優(yōu)值
的上界。因此,可以從對偶問題(37)的最優(yōu)值中找到最尖銳的上界,其定義為

.
根據(jù)對偶理論,對偶問題(37)總是凸的。換句話說,解決拉格朗日對偶問題(37)等價于最小化凸分段線性函數(shù)。函數(shù)f:如果f是有限個仿射函數(shù)
的最大值,
是一個分段線性凸函數(shù)。我們可以利用這一特性,通過對偶割平面法找到最佳拉格朗日乘子μ。
3) 更新拉格朗日因子:
次梯度法是解決拉格朗日對偶問題和更新拉格朗日因子的常用方法。然而,它的收斂速度較慢[41],[42]。次梯度法僅利用最后一次迭代的信息來更新拉格朗日因子。另一方面,使用雙剖切面方法有助于存儲所有先前發(fā)現(xiàn)的拉格朗日因子
、最佳拉格朗日松弛函數(shù)
和次梯度
的信息直至迭代n次,并在下一次迭代中使用它們找到新的拉格朗日乘子

[43]。對于每個松弛約束的次梯度
可從(38)中找到。

根據(jù)次梯度的定義,不等式(39)適用于所有μ

為了更新拉格朗日因子,引入了切割平面的穩(wěn)定版本作為近端束方法[44]。與切割平面法類似,在近端束法中考慮了對偶函數(shù)(41)的多面體模型。此外,將二次懲罰項添加到目標函數(shù)(40)中以穩(wěn)定圍繞中心點的最優(yōu)拉格朗日因子
。中心點被認為是迄今為止發(fā)現(xiàn)的能夠顯著改善解的最佳拉格朗日因子。參數(shù)
控制二次項的權重。通過迭代求解該優(yōu)化問題并提供了一系列拉格朗日乘數(shù)因子
,迭代N被視為切割平面優(yōu)化的最后一次迭代。
4)使不可行解可行:
迭代求解拉格朗日松弛問題收斂到
和
分別作為最佳拉格朗日因數(shù),綠色信號狀態(tài)和黃色信號狀態(tài)。此外,它還產(chǎn)生了所有CAVs的相應最優(yōu)軌跡。盡管重新表述該問題將對偶間隙降低到非常小的值,拉格朗日松弛的最優(yōu)解仍然可能是不可行的信號定時參數(shù),不滿足松弛約束(33)。我們引入一個簡單的優(yōu)化問題,在這種情況下找到一個很好的可行信號定時解決方案。用(33)重新表示約束(13),將拉格朗日松弛問題的信號定時變量的解推到凸多面體中的可行整數(shù)值附近。因此,不需要改變拉格朗日松弛解的結構。我們需要將最終的不可行信號定時解決方案投影到最接近的可行整數(shù)點。引入補充優(yōu)化問題FP,以確保松弛問題解的可行性。FP中的決策變量包含所有信號定時變量。此外,從拉格朗日松弛中發(fā)現(xiàn)的

和
是輸入。所提出的優(yōu)化問題的目標函數(shù)使信號定時變量與拉格朗日松弛的相應解之間的差異最小化。此外,所有信號定時約束,包括解除的成對約束,在FP中都被考慮到。假設最佳信號定時參數(shù)始終同時為至少兩個運動提供非紅色信號狀態(tài),則問題中還添加了約束條件(43)。如果信號配時的預測范圍大于交叉口所有引道的最小綠燈時間,則優(yōu)化問題FP始終是可行的。
5) 滾動時域控制:
將拉格朗日松弛法嵌入滾動時域控制(RHC)中,用于尋找最優(yōu)信號和軌跡優(yōu)化問題,以考慮問題的動態(tài)性質。圖5顯示了通用解決方案技術框架。

圖5 嵌入RHC的拉格朗日松弛過程
首先,我們在時間步長0處初始化拉格朗日因數(shù)。然后,對每個車道組求解LR-SSTTO規(guī)劃,確定信號配時參數(shù)和車輛軌跡。解被傳遞到對偶函數(shù)(DO)規(guī)劃以更新拉格朗日因數(shù)。通過計算SSTTO問題的上下界差來評價收斂準則。然后對信號定時參數(shù)的可行性進行驗證。如果解不可行,則解決優(yōu)化問題FP,根據(jù)可行的信號計劃更新最優(yōu)CAV和HV軌跡。如果拉格朗日松弛法的解是可行的,則它們是原問題的最優(yōu)解,不需要求解FP。RHC在進入Vissim微模擬器的第一個時間步中,除了信號配時計劃外,還實施CAVs的軌跡。然后,根據(jù)最后更新的拉格朗日松弛解更新拉格朗日因子,規(guī)劃范圍向前滾動一個時間步,直到研究階段結束。
5 案例研究
我們將建議的解決方案技術應用于具有專用左轉車道的孤立十字交叉口,如圖4所示。假設車輛在到達交叉口附近之前已在所需車道上。交叉口前后的探測范圍為1000英尺。信號狀態(tài)每兩秒更新一次,而車輛加速度、速度和位置每0.5秒更新一次。RHC的預測范圍為20秒。更多詳情見表2。
表2 案例參數(shù)
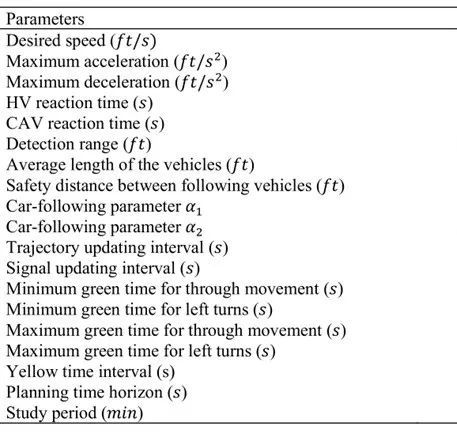
表3 STTO案例研究中的要求模式

STTO問題在15分鐘的學習時間內得到解決。表3總結了本研究中測試的不同場景。對于每種情況,考慮六種不同的CAVs市場滲透率(即0%、20%、40%、60%、80%和100%),以評估合作信號配時和軌跡優(yōu)化問題。Vissim[45]用于測試所提出的算法。COM接口用于收集網(wǎng)絡中車輛的信息,并將最優(yōu)軌跡應用于CAVs的運動。所提出的算法是用Java編寫的,運行在具有Intel core i-9-9900 CPU和64 GB內存的臺式計算機上。CPLEX[46]用于解決MILP優(yōu)化問題。
6 結果
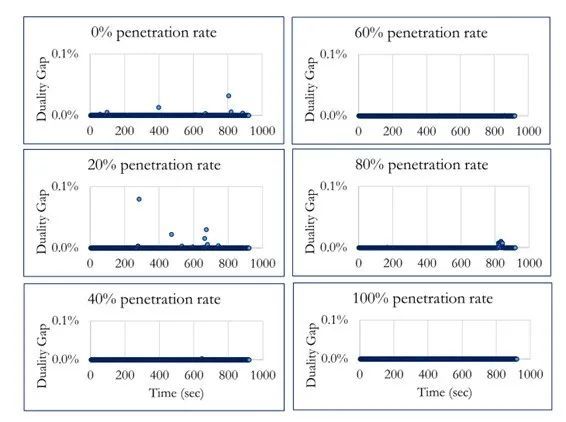
圖6 重構后的拉格朗日松弛的對偶性缺口
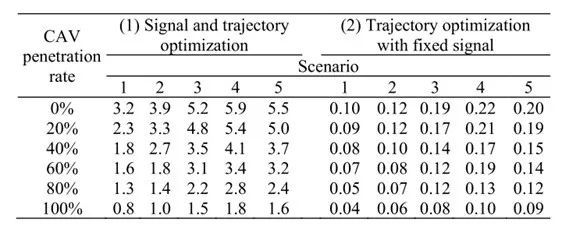
表4 不同場景下的平均運行時間(s)
圖6顯示了場景4中的對偶間隙,即本研究中測試的最高需求水平,當兩兩沖突約束(13)被更緊密的派系取代時,使用所提的拉格朗日松弛技術解決STTO問題的結果。由于該問題是通過滾動時域控制來解決的,因此每兩秒鐘求解一次拉格朗日松弛問題,以找到最佳信號配時方案。因此,對于動態(tài)解決的所有松弛問題,都會報告對偶間隙。圖6表明對偶間隙大多為零,這意味著所提出的解決方案技術大多具有強對偶性。此外,在場景4中使用不同的CAV市場滲透率測試的所有情況下證明對偶間隙總是小于0.1%。注意,其他場景的結果也證實了相同的模式。表Ⅳ顯示了情景1至5下所提模型的平均計算運行時間。平均運行時間由兩個優(yōu)化程序顯示,其中(1)同時優(yōu)化信號定時參數(shù)和軌跡,(2)僅使用固定信號定時參數(shù)優(yōu)化軌跡。在這兩種情況下,當CAV市場滲透率增加時,優(yōu)化運行時間減少,因為與HVs跟馳模型相關的變量數(shù)量減少。還表明,增加通信量與更高的運行時間相關。使用增強拉格朗日松弛技術進行信號和軌跡優(yōu)化的最小和最大平均運行時間為0.8秒和5.9秒。需要注意的是,所提出的方法是一種迭代方法,并且可能無法實時找到最優(yōu)解,因為信號定時參數(shù)每2秒進行一次優(yōu)化。然而,通過將最優(yōu)性間隔設置為更高的值或以更高的間隔更新信號定時參數(shù),可以實現(xiàn)實時解決方案。表Ⅳ還顯示了固定信號參數(shù)下軌跡優(yōu)化的最小和最大運行時間為0.04s和0.22s。表Ⅴ比較了STTO策略不同CAV市場滲透率的平均行程時間和三種實用信號控制方法:(a)固定時間[47]–[49],(b)驅動控制和(c)自適應信號控制。固定時間信號控制可被視為基線,其中信號定時參數(shù)根據(jù)一天中不同時間的需求水平預測進行優(yōu)化。固定時間信號控制無法響應不可預見的需求變化。驅動控制裝置利用車輛檢測器,并能對觀測到的交通環(huán)境變化作出反應。然而,它不能預測近期的情況。自適應信號控制可以預測近期的交通狀況,并主動改變信號配時參數(shù)。我們使用PTV Vistro[50]找到最佳固定時間和驅動信號定時計劃。此外,還提供了基于小區(qū)傳輸模型[51]–[53]的自適應信號控制方法的結果,以供進一步比較。
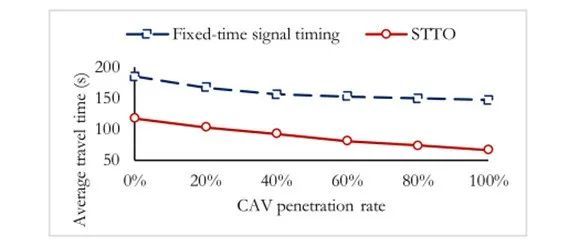
結果表明,在不同CAV滲透率的所有情況下,與固定時間、驅動和自適應信號控制相比,STTO的平均行程時間顯著縮短。結果還表明,平均行程時間隨著CAV滲透率的增加而減少,這與預期一致。然而,在交通量較低的情況下,這種減少不太明顯。例如,在場景1和場景2中,當CAV穿透率為60%、80%和100%時,平均行程時間幾乎相同。另一方面,在需求水平較高的情況下(如場景4),增加CAV滲透率仍然可以通過減少所有車輛的平均行駛時間來改善交叉口的性能。此外,當CAV的市場滲透率發(fā)生變化時,我們比較了STTO與固定時間信號配時計劃的性能。本分析考慮了場景4,因為其需求量最高。當信號配時固定時,只有CAVs的軌跡被優(yōu)化,以有效利用綠燈時間并減少交叉口的停車次數(shù)。圖7顯示了STTO在平均行程時間方面總是優(yōu)于固定時間信號定時計劃。此外,當CAV的市場滲透率增加時,與固定時間計劃相比,STTO的行程時間減少率更高。
表5 不同信號控制器的平均通行時間
圖7 比較STTO與固定時間信號在不同的CAV市場滲透率下的表現(xiàn)
圖8 場景4中的平均隊列長度
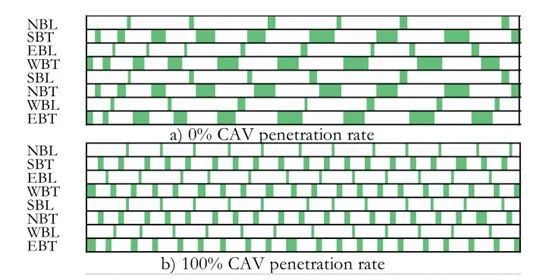
圖9 比較0%和100%CAV比例下的信號配時計劃
圖8顯示了場景4中具有最高的測試需求水平的不同CAV滲透率交叉口的不同引道的所有車流的平均排隊長度。平均隊列長度隨著CAV市場滲透率的增加而減少。當?shù)缆飞蠜]有控制人駕駛車輛移動的CAV時,平均排隊長度約為450英尺。當所有車輛均為CAVs時,平均排隊長度減少到50英尺以下。
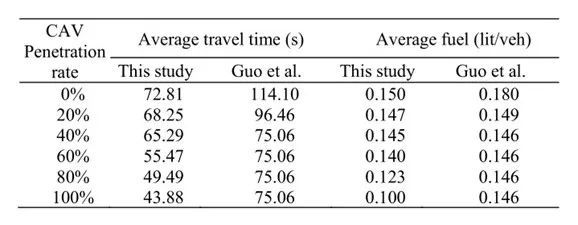
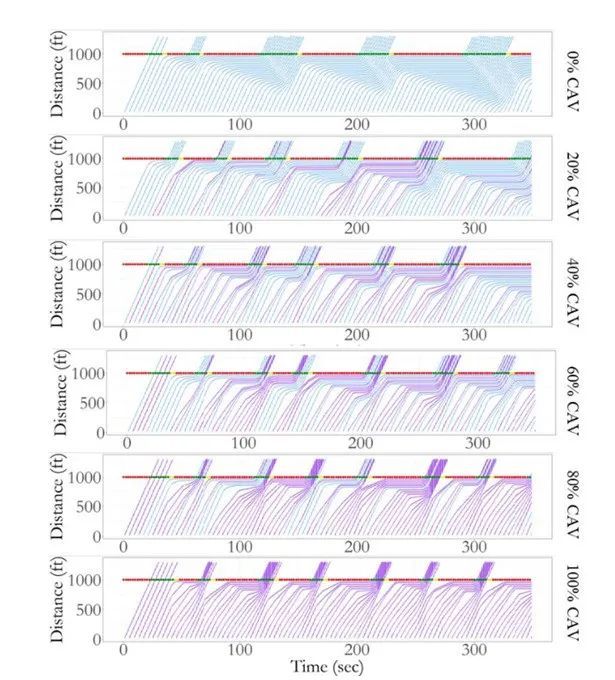
圖9顯示了在場景4中,在測試需求水平最高的情況下,交叉口不同引道中所有車輛的信號配時參數(shù),CAV滲透率為0%和100%。當CAV滲透率為零時,交叉口所有移動的綠燈期較長。這是由于人力驅動車輛的啟動損失時間較長。另一方面,當所有車輛都是CAVs時,綠燈期更短、更頻繁。這是因為在交叉口前停車時,CAVs的啟動損失時間較短。此外,CAV調整其速度,以最大速度通過交叉口;因此,通過交叉口需要更短的綠燈時間。圖10顯示了在具有最高測試需求的場景4中,不同市場滲透率下東行通過(EBT)的CAVs和HVs的軌跡。增加CAVs的滲透率與所有車輛通過交叉口的平滑軌跡相關。此外,隨著CAVs的市場滲透率的增加,隊列的后面越來越靠近交叉口。由于目前的實踐狀態(tài)策略沒有一種與CAVs軌跡共同優(yōu)化信號配時計劃,因此我們將STTO的結果與Guo等人最近開發(fā)的最新狀態(tài)策略進行了比較[3]。本研究使用動態(tài)規(guī)劃和射擊啟發(fā)式方法,在混合環(huán)境中優(yōu)化CAVs的信號配時計劃和軌跡。結果表明,本文提出的算法可以在較短的計算時間內找到較低的平均行程時間和燃油消耗。燃油消耗量根據(jù)VT-Micro模型[54]計算,參數(shù)與Maet al[55]相同。以下參數(shù)的設置與Guo等人[3]中的研究案例完全相同:交叉路段長度:1312英尺,飽和率:0.6,直行最大速度:98ft/s,左轉最大速度:79ft/s,規(guī)劃視距:122s,跟車參數(shù):最大加速度=4.72 ft/S2,最大減速度=5.48ft/S2,優(yōu)化信號定時計劃的步長:8秒。
表Ⅵ顯示,通過增加CAVs的市場滲透率,平均行程時間和燃油消耗量有所減少。此外,對于不同的CAVs市場滲透率,我們提出的算法的性能優(yōu)于[3]中的最佳結果。應注意的是,Guo等人[3]假設信號配時計劃有四個階段。然而,我們的研究包括八個階段,這代表了一個更一般的情況。此外,[3]中的相位即使某些相位可以跳過也在循環(huán)中按固定順序考慮。另一方面,在我們的研究中,考慮了無序的相位。因此,這些參數(shù)的差異可能會影響比較的結果。所有這些差異為我們的問題創(chuàng)造了一個更大的可行區(qū)域,這導致了表Ⅵ所示的解決方案性能差異顯著。表Ⅶ顯示了STTO在研究期間5、10、15和30分鐘內獲得的平均行程時間、平均油耗和總運行時間。針對需求最高的場景4和兩個CAV市場滲透率分別為40%和100%的場景4提供了性能度量。表Ⅶ中的趨勢表明,由于網(wǎng)絡中存在更多車輛,研究周期的延長與更高的平均行程時間和平均燃油消耗量相關。此外,由于變量數(shù)量和內存使用量的增加,運行時間會隨著研究周期的增加而增加。
圖10 Lane1中CAVs和HVs的軌跡
表6 與GUO ET AL.[4]的方法對比
7 結論
本研究開發(fā)了一種在CAVs和HVs混合交通環(huán)境下協(xié)調信號交叉口信號配時和軌道優(yōu)化的方法。我們將STTO公式化為一個混合整數(shù)非線性程序,假設所有車輛都已連接,或者交叉口配備了能夠提供車輛位置的探測器(如雷達裝置)。使用Helly的跟車模型預測HVs的軌跡。由于非線性和二進制變量的存在,所提出的優(yōu)化程序非常復雜。因此,我們將非線性約束線性化,并使用拉格朗日松弛技術將可交互優(yōu)化問題分解為車道級子問題,從而降低了問題的復雜性。因此,交叉口各車道的信號配時參數(shù)和車輛軌跡可由單個控制器控制。我們還重新構造了可行域緊凸殼的STTO問題,以減少對偶間隙。此外,在拉格朗日松弛問題收斂后,當松弛約束不滿足時,引入互補優(yōu)化問題來尋找高質量的可行信號定時參數(shù)。所提出的解決方案技術嵌入了一種后退地平線控制技術,以捕捉問題的動態(tài)性質。
結果表明,所開發(fā)的方法可以在最大0.1%的最優(yōu)性差距內找到解決方案。研究還表明,不同CAV市場滲透率測試下STTO的性能優(yōu)于自適應控制器信號配時性能,平均行程時間減少5%至51%的。此外,增加CAVs的穿透率可減少交叉口所有車輛的平均行程時間。這種減少在較高的交通量中更為顯著。建議的方法適用于只進行左轉運動的交叉口布局。這將是值得在未來推廣的方法,并找到在所有交叉口類型中的最佳信號配時參數(shù)和車輛軌跡。此外,本研究假設車輛不會在檢測到的交叉口范圍內改變車道,也不會使用CAV車道改變來進一步控制交通流。開發(fā)預測HVs換道行為和優(yōu)化CAV換道決策的算法可以進一步改善交通運行。這項研究使用了一個線性跟馳模型,使用更復雜的跟馳模型是值得探索的。研究交通網(wǎng)絡中信號配時和軌跡控制的影響,交叉口相互溝通并協(xié)調決策,為進一步改善交通運行和安全提供了巨大潛力需要進一步研究。
參考文獻




 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
