




 廣告
廣告





















































電驅動橋用減速器NVH優(yōu)化
2021-12-28 19:55:42· 來源:AUTO行家

作者:李艷紅, 董婷單位:中車戚墅堰機車車輛工藝研究所有限公司引言某款電機、車橋與減速器集成為電驅動橋系統, 并配置在公交車輛上。在裝車試驗驗證階段, 發(fā)現
作者:李艷紅, 董婷
單位:中車戚墅堰機車車輛工藝研究所有限公司
引言
某款電機、車橋與減速器集成為電驅動橋系統, 并配置在公交車輛上。在裝車試驗驗證階段, 發(fā)現電驅動橋系統存在噪聲大和異響的問題: 車輛正常行駛過程中在車內可聽到從電驅動橋系統處傳出的較大的噪聲并伴有沉悶的、有節(jié)奏的“轟轟” 聲; 在加速踏板和制動踏板動作時有明顯的短暫的“咚咚” 的異響, 制動踏板動作時異響尤為突出。為此, 本文作者針對此問題采取了相應的整改措施進行優(yōu)化, 消除了異響, 降低了噪聲值, 取得了顯著效果。
問題分析
針對上述問題, 借助具有振動和噪聲信號采集及處理功能的專業(yè)工具———LMS Test Lab 振動噪聲測試系統,在車內電驅動橋上方———后排座位處布置了麥克風采集噪聲, 在電機和減速器上分別布置了振動傳感器采集振動數據, 對車輛運行過程中電驅動橋系統產生的問題進行了深入的分析研究。
1.1 正常行駛時噪聲大的問題
以加速過程為分析對象, 以階次分析技術為主要分析方法, 對產生較大的噪聲及低沉異響及產生原因進行初排查。采集到的噪聲分布如圖1所示, 車內噪聲5. 93階及其高次諧階次、8階及其高次諧階次的噪聲較大, 且存在電機PWM載波頻率產生的噪聲成分。
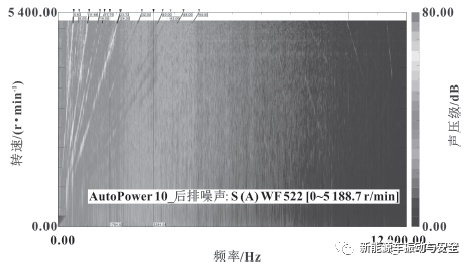
圖1 加速時車內后排座位右耳側噪聲數據
分析了安裝在電機和減速器上的振動傳感器采集到的數據, 如圖2 所示。電機和減速器振動在5. 93 階、8階、24 階及其高次諧階次上均有體現, 且電機存在共振和PWM 載波頻率的振動成分, 振動與噪聲分布有一定的相關性。

圖2 電機和減速器豎直方向振動瀑布圖
進一步排查, 在臺架上對減速器的振動進行測試,辨別電驅動系統噪聲和振動的源頭。減速器臺架振動測試結果如圖3 所示, 存在5. 93 階和24 階次及其高次諧階次??梢? 8 階及其相關階次振動和噪聲是電機相關的特征階次。
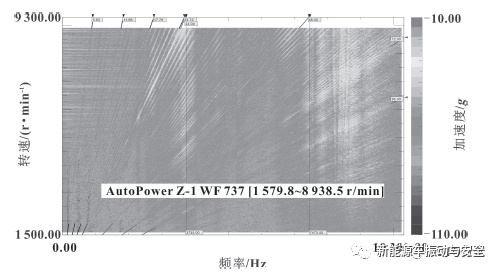
圖3 減速器臺架試驗豎直方向振動瀑布圖
具體地, 電機特征階次為8 階, 兩級齒輪傳動的減速器的嚙合階次分別為24 階、5. 93 階。電機特征階次的高次諧階次(3 次、6 次等) 與一級齒輪的嚙合階次及其高次諧階次重合(2 次)、電機特征階次的高次諧階次(3 次、6 次) 與二級齒輪嚙合階次的高次諧階次(4次、8 次等) 相接近、一級齒輪嚙合階次和二級齒輪嚙合階次的高次諧階次( 4 次、8 次) 相接近, 引起了電機和減速器、減速器自身的振動耦合, 產生較大的振動噪聲并伴有低沉的、有節(jié)奏的轟轟聲。
1. 2 踏板動作時異響的問題
以車輛加速—勻速—制動—滑行運行工況對踏板動作時的異響進行分析研究, 運行過程中在車輛后排采集到的噪聲數據如圖4 所示。在松開油門踏板, 踩下制動踏板及松開制動踏板時均存在較寬頻帶的范圍產生了無規(guī)則的噪聲分布。
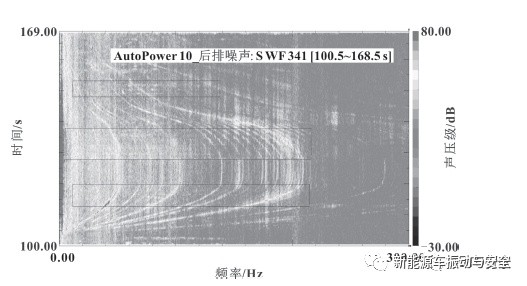
圖4 踏板動作時車內后排座位右耳側噪聲
分析了安裝在電機和減速器上的振動傳感器采集到的數據, 如圖5 所示。
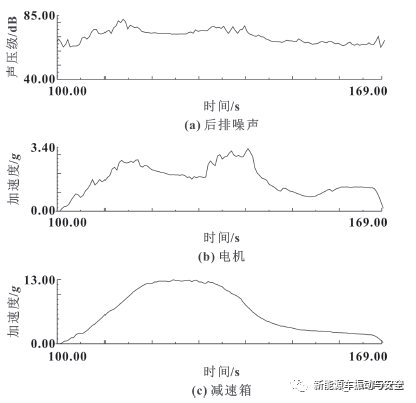
圖5 踏板動作時噪聲和振動能量分布
在全工況范圍內, 車內噪聲和電機的振動在趨勢上有一定的相關性。在踩下制動踏板時, 減速器振動變化和噪聲的變化有一定的相關性, 受工況變化引起的振動尤其明顯。
具體地, 在踏板動作時, 傳動扭矩瞬間突變, 由于傳動側隙的存在使傳動系統運動副間會產生碰撞和噪聲。判斷該電動系統扭矩控制精度低及輪間存在較大的側隙產生的異響問題。
優(yōu)化方案
2. 1 優(yōu)化傳動輪系
在不改變電驅動系統動力性的前提下, 優(yōu)化了輪系配比。優(yōu)化后的一級、二級齒輪的特征階次分別為27、7. 6, 避開了傳動系統內部特征階次以及和電機特征階次重合及相近的現象, 進而避免系統的共振及因此而產生的噪聲大和“哄哄” 異響的現象。
2. 2 優(yōu)化齒形
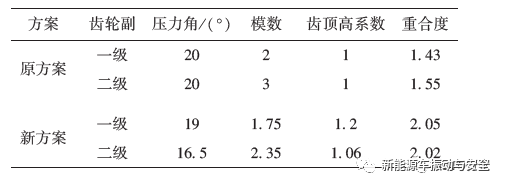
研究表明, 重合度越大不僅可以提高齒輪的承載能力, 而且可有效降低輪系噪聲[5] 。細高齒齒輪采用了小模數、小壓力角、大齒頂高的齒輪參數。小模數齒輪不但可以提高端面重合度, 且因齒根的減薄可提高輪齒柔性, 進而更易吸收輪齒的振動。小壓力角的齒輪剛度也相應減小, 齒輪嚙入和嚙出的動載荷減小, 引起的沖擊振動則相應減小。齒頂高系數增大可直接增大輪系重合度。與原方案采用標準漸開線齒輪不同, 新設計輪選用了小壓力角、小模數和大齒頂高系數的細高齒齒輪設計, 增大了輪系重合度, 以實現減小輪系噪聲目的。原方案和新輪系配比方案齒輪基本參數見表1。
表1 輪系基本參數
2. 3 優(yōu)化輪系側隙
該減速器側隙包含兩級齒輪副側隙以及差速器輪系側隙。為了保證輪系潤滑良好、補償載加工制造偏差、安裝誤差、荷變形、熱變形等因素的影響, 須有適當的齒輪側隙。側隙過小, 會引起輪系卡滯, 齒面磨損; 側隙過大, 齒輪嚙合或者反向嚙合時的碰撞會產生較大的沖擊和噪聲。
差速器內部側隙為0. 32、0. 29 mm, 該側隙值偏大為減速器工況變化時產生異響的主要原因。新方案該差速器側隙分別調整為0. 20、0. 19 mm。為了進一步降低工況變化時傳動系統產生的撞擊及噪聲, 在輪系動力傳動許可范圍內進一步收縮了一級、二級輪系的齒間側隙, 較原方案減小12. 6%。
優(yōu)化結果
優(yōu)化全部完成以后, 通過裝車試驗對整改效果進行檢查。在車內明顯感覺到噪聲有大幅降低, 且未有異響產生。分別采集了系統在運行過程中的振動和噪聲數據, 驅動系統消除了因特征階次重合或者相近而產生的振動耦合, 如圖6 所示。優(yōu)化后電驅動系統全工況內噪聲最大為75 dB, 較原方案降低了10 dB, 電機和減速器豎直方向上振動有效值分別降低了50%和67%。
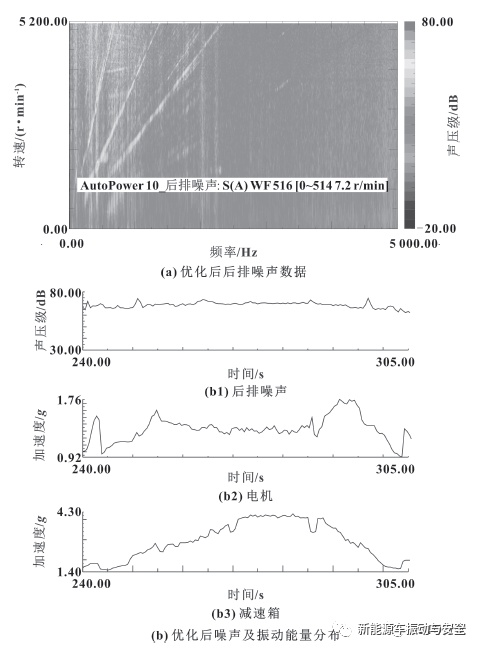
圖6 優(yōu)化后噪聲及振動數據
結論
電驅動系統的集成化設計是今后電驅動發(fā)展的主要方向。集成化電驅動系統NVH 面臨電機噪聲振動、減速器噪聲振動、系統結構集成產生的噪聲和振動等問題。在設計及優(yōu)化過程中需要綜合考慮電機噪聲振動控制、減速器噪聲振動控制、傳動系統動力學匹配以及控制算法的優(yōu)化等問題。
傳動系統中不可避免的側隙是產生振動和噪聲的主要原因。在進行電驅動產品設計開發(fā)時需要綜合考慮系統功能和性能需求進而選擇合理的最優(yōu)的側隙參數配置。



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統開發(fā)策略將如何
2026-03-03 12:44
-
聯合國法規(guī)R59對機動車備用消聲系統的工程
2026-03-03 12:08
-
聯合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
