




 廣告
廣告





















































車載動(dòng)力電池BMS技術(shù)要點(diǎn)解析及神經(jīng)網(wǎng)絡(luò)技術(shù)的應(yīng)用
2022-01-27 13:39:43· 來(lái)源:汽車動(dòng)力總成

電動(dòng)汽車電池管理系統(tǒng)(BMS)是連接車載動(dòng)力電池和電動(dòng)汽車的重要紐帶,將電池或電池組的監(jiān)測(cè)及管理集于一體,確保電池或者電池組的安全可靠,以最佳狀態(tài)輸出動(dòng)力
電動(dòng)汽車電池管理系統(tǒng)(BMS)是連接車載動(dòng)力電池和電動(dòng)汽車的重要紐帶,將電池或電池組的監(jiān)測(cè)及管理集于一體,確保電池或者電池組的安全可靠,以最佳狀態(tài)輸出動(dòng)力。BMS可以實(shí)現(xiàn)對(duì)電池的實(shí)時(shí)監(jiān)控、自動(dòng)均衡、智能充放電等重要功能,在有效保障電池安全的同時(shí),可以實(shí)現(xiàn)對(duì)電池剩余電量的監(jiān)測(cè),通過(guò)有效的電池管理,可以提高電動(dòng)汽車?yán)m(xù)航里程,是動(dòng)力電池組中不可或缺的重要部件,對(duì)于電動(dòng)車的正常運(yùn)行意義重大。
電池管理系統(tǒng)大致功能可分為,電池狀態(tài)的檢測(cè),包括但不限于對(duì)電壓、電流、溫度三種物理量的檢測(cè),它是電池管理系統(tǒng)中最基本的功能,是其他各項(xiàng)功能中的前提和基礎(chǔ);
電池的眾多安全保護(hù),包括但不限于過(guò)流(動(dòng)力電池都支持短時(shí)間段內(nèi)的放載放電,在車輛起步和加速中提供較大電流滿足動(dòng)力要求)、過(guò)充過(guò)放(防止電池在滿電時(shí)繼續(xù)充電、沒(méi)電時(shí)繼續(xù)放電)、過(guò)溫保護(hù)(面對(duì)溫度接近危險(xiǎn)值或突然快速上升,需要采取相應(yīng)的保護(hù)措施);
電池的能量控制,包括但不限于充放電管理(在充電過(guò)程中對(duì)充電電壓、電壓進(jìn)行實(shí)時(shí)優(yōu)化控制,來(lái)達(dá)到調(diào)節(jié)充電時(shí)間、效率和程度;以及放電過(guò)程中適當(dāng)?shù)南拗谱畲蠓烹婋娏?,?lái)增加車輛續(xù)駛里程以及電池壽命)、電池均衡管理(電池PACK包有“木桶效應(yīng)“,最終性能取決于“短板“的那塊單體電池,現(xiàn)有主流電動(dòng)汽車電池均衡管理采用被動(dòng)均衡技術(shù),為電池組中每個(gè)單體電池并聯(lián)一個(gè)耗散器件進(jìn)行放電分流,實(shí)現(xiàn)單體能量的均衡,在電池組中,某單體電池電壓與平均電池電壓相差到一定閾值時(shí),連通分流電阻將單體電池部分電量以熱能的形式消耗掉,把電壓降到平均電壓水平。);
電池的狀態(tài)分析,有電池剩余電量SOC、以及電池剩余壽命SOH評(píng)估。電池SOH、SOC受到工作溫度、放電流的大小等因素影響,需要在使用過(guò)程中不斷的進(jìn)行修正來(lái)確保駕駛員獲得較為準(zhǔn)確的信息。
以及電池的信息儀表盤顯示及與其他控制器間的數(shù)據(jù)信息交互等。
動(dòng)力電池荷電狀態(tài)估算(SOC)是電池管理系統(tǒng)(BMS)的關(guān)鍵技術(shù),是電池能量管理功能的基礎(chǔ),若無(wú)法準(zhǔn)確地估算SOC,會(huì)減低電池的安全性能,無(wú)法有效地保護(hù)電池,大幅度降低電池的使用效率。SOC不能直接測(cè)量,傳統(tǒng)的以端電壓為測(cè)量對(duì)象無(wú)法得到精確的SOC值。目前有多種SOC估算方法,有開(kāi)路電壓法、安時(shí)積分法(現(xiàn)多數(shù)純電車使用“安時(shí)積分法+開(kāi)路電壓法“來(lái)解決SOC估算,即在放電平臺(tái)處使用開(kāi)路電壓法估算、平臺(tái)前后段結(jié)合安時(shí)積分法估算SOC值)、各種卡爾曼濾波法和神經(jīng)網(wǎng)絡(luò)法等。
人工神經(jīng)網(wǎng)絡(luò)通過(guò)一定的結(jié)構(gòu)將功能簡(jiǎn)單的神經(jīng)元組織起來(lái),實(shí)現(xiàn)數(shù)據(jù)群體的并行處理。根據(jù)連接方式的差異,神經(jīng)網(wǎng)絡(luò)可分為:分層神經(jīng)網(wǎng)絡(luò)和相互連接型神經(jīng)網(wǎng)絡(luò)。神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)基于對(duì)大量數(shù)據(jù)的訓(xùn)練,也是網(wǎng)絡(luò)模型調(diào)整自身參數(shù)的過(guò)程。其可以通過(guò)對(duì)自身參數(shù)的調(diào)節(jié),提高自身的學(xué)習(xí)能力,達(dá)到對(duì)環(huán)境的了解。學(xué)習(xí)方式有兩種,有導(dǎo)師學(xué)習(xí)和無(wú)導(dǎo)師學(xué)習(xí),學(xué)習(xí)算法一般有以下兩種:
(1)Hebb學(xué)習(xí)算法:
同時(shí)興奮的兩個(gè)神經(jīng)元會(huì)加強(qiáng)彼此之間的突觸連接,即連接權(quán)值增大,其數(shù)學(xué)表達(dá)式為:

其中,r表示兩個(gè)神經(jīng)元之間連接權(quán)值的變化量,表示神經(jīng)元 和 j 的輸出,?為學(xué)習(xí)速率。
(2)δ學(xué)習(xí)算法:
設(shè)網(wǎng)絡(luò)的輸入、輸出樣本數(shù)據(jù)對(duì)為(,),網(wǎng)絡(luò)實(shí)際輸出為,其中:

則可用下列式子表示δ學(xué)習(xí)規(guī)則:

其中,r表示兩個(gè)神經(jīng)元連接權(quán)值的變化量,表示神經(jīng)元i的輸出,?為學(xué)習(xí)速率,為以下函數(shù)對(duì)神經(jīng)元輸入?yún)?shù)的偏導(dǎo)數(shù):

本文根據(jù)動(dòng)力電池?cái)?shù)據(jù)采集及SOC估算特點(diǎn),采取多層前向型神經(jīng)網(wǎng)絡(luò),多層前向型神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)一般分為三層:輸入層、隱含層和輸出層,設(shè)計(jì)其結(jié)構(gòu)如圖:
下以三元鋰電池為實(shí)驗(yàn)對(duì)象,具體參數(shù)為:標(biāo)稱電壓為3.8 V,單體額定容量為74 Ah,充電上限電壓為4.25 V,下限電壓為2.75 V,最大放電電流為2 C(以148A電流放電)。外部的信號(hào)-以三元鋰電池電壓、電流、溫度由輸入層接入,各輸入單元將輸入信號(hào)傳送給隱含層的各單元。隱含層作為神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)內(nèi)部的處理單元,根據(jù)不同的網(wǎng)絡(luò)需求其層數(shù)也不同。輸出信號(hào)估算SOC值經(jīng)輸出層輸出。通過(guò)將準(zhǔn)備好的4512組,每組63個(gè)數(shù)據(jù)作為樣本,4303組數(shù)據(jù)作為訓(xùn)練樣本,建立模型,導(dǎo)入訓(xùn)練數(shù)據(jù),用于網(wǎng)絡(luò)訓(xùn)練及測(cè)試網(wǎng)絡(luò)的擬合性能,實(shí)現(xiàn)非線性函數(shù)的擬合,最終完成網(wǎng)絡(luò)預(yù)測(cè)功能。本次實(shí)驗(yàn)209組數(shù)據(jù)作為測(cè)試樣本,網(wǎng)絡(luò)訓(xùn)練結(jié)束后,用于預(yù)測(cè)函數(shù)輸出,最后對(duì)預(yù)測(cè)結(jié)果進(jìn)行分析。
神經(jīng)網(wǎng)絡(luò)模型建立時(shí),將單體電池電壓、單體溫度、總電流及總電壓等數(shù)據(jù)導(dǎo)入模型,進(jìn)行訓(xùn)練??偟臄?shù)據(jù)導(dǎo)入為63組,故輸入層節(jié)點(diǎn)數(shù)為63。SOC作為模型訓(xùn)練的唯一目標(biāo),所以輸出層的節(jié)點(diǎn)為1。隱含層的節(jié)點(diǎn)數(shù)由下式確定:
h: 隱含層節(jié)點(diǎn)數(shù),m:輸入層節(jié)點(diǎn)數(shù),n: 輸出層節(jié)點(diǎn)數(shù),a:1~10之間的調(diào)節(jié)常數(shù)
具體實(shí)現(xiàn)可以使用MATLAB中的神經(jīng)網(wǎng)絡(luò)工具箱,打開(kāi)人工神經(jīng)網(wǎng)絡(luò)窗口,導(dǎo)入準(zhǔn)備好的數(shù)據(jù),設(shè)置訓(xùn)練樣本80%,驗(yàn)證樣本10%,測(cè)試樣本10%。訓(xùn)練函數(shù)為trainlm(Levenberg-Marquardt BP訓(xùn)練函數(shù)),性能函數(shù)為mse(均方誤差函數(shù)),學(xué)習(xí)函數(shù)為learngd(基于梯度下降法的學(xué)習(xí)函數(shù)),傳遞函數(shù)為tansig(S型的正切函數(shù)),迭代次數(shù)初始設(shè)置為100次。
建立好的神經(jīng)網(wǎng)絡(luò)模型為:

設(shè)置的隱含層個(gè)數(shù)為9層,根據(jù)訓(xùn)練結(jié)果進(jìn)行隱含層個(gè)數(shù)的修改。
網(wǎng)絡(luò)參數(shù)設(shè)置完畢,將建立好的模型進(jìn)行數(shù)據(jù)訓(xùn)練。訓(xùn)練結(jié)果如下:
由回歸圖可以看出神經(jīng)網(wǎng)絡(luò)的訓(xùn)練、驗(yàn)證和測(cè)試的結(jié)果。對(duì)于一個(gè)好的擬合,其數(shù)據(jù)應(yīng)該沿45°角線,表示輸出等于期望。本次擬合輸出結(jié)果的R值均大于0.99,表明擬合在理論是較優(yōu)的,也表明所建立的神經(jīng)網(wǎng)絡(luò)模型是較優(yōu)的。由性能圖可以看到,本次函數(shù)擬合最佳迭代次數(shù)為86次。
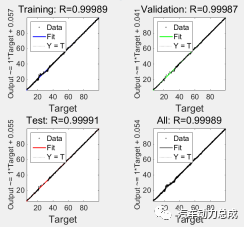
回歸圖
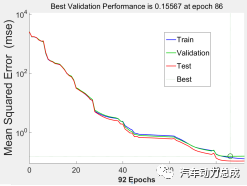
性能圖
為訓(xùn)練模型自動(dòng)生成的部分誤差數(shù)據(jù)值,前圖為網(wǎng)絡(luò)輸出的估算值,后圖為輸入值與估算值的誤差數(shù)據(jù)。由圖8可以看出,誤差穩(wěn)定在0.2~0.3之間,最大誤差為0.8,網(wǎng)絡(luò)輸出值與網(wǎng)絡(luò)訓(xùn)練目標(biāo)值基本一致,說(shuō)明建立的網(wǎng)絡(luò)模型是成功的。
訓(xùn)練好的神經(jīng)網(wǎng)絡(luò)模型,應(yīng)用于實(shí)驗(yàn)數(shù)據(jù)的仿真。仿真結(jié)果如下:
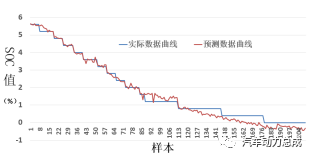
SOC仿真曲線
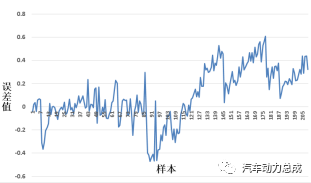
SOC誤差曲線
SOC仿真曲線圖中藍(lán)色曲線為實(shí)際數(shù)值曲線,紅色曲線為預(yù)測(cè)數(shù)值曲線。由仿真結(jié)果可以看出,在所測(cè)試的209組數(shù)據(jù)中,SOC的預(yù)測(cè)數(shù)值曲線基本沿SOC實(shí)際數(shù)值曲線變化。在實(shí)際的測(cè)試數(shù)據(jù)中,SOC數(shù)值是實(shí)時(shí)變化的,每秒的SOC都會(huì)產(chǎn)生輕微變化,但受采集精度影響,實(shí)際的SOC曲線并不是平滑的,而表現(xiàn)為階梯狀。在預(yù)測(cè)結(jié)果中,數(shù)據(jù)變化更平穩(wěn),曲線圖也更平滑,函數(shù)預(yù)測(cè)效果較優(yōu)。訓(xùn)練好的模型用于數(shù)據(jù)預(yù)測(cè),如SOC誤差曲線圖所示,預(yù)測(cè)誤差結(jié)果位于±0.8之間,由于放電末期電池的溫度及內(nèi)阻抗增大的影響,SOC的誤差值波動(dòng)范圍較大。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 95



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開(kāi)發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
