




 廣告
廣告





















































太陽能汽車用輪轂電機(jī)設(shè)計(jì)
2022-02-07 15:22:43· 來源:汽車動(dòng)力總成

摘要:無軛分段電樞(YASA)拓?fù)浣Y(jié)構(gòu)已被認(rèn)為是太陽能汽車輪轂驅(qū)動(dòng)系統(tǒng)的研究熱點(diǎn)。通過將解析設(shè)計(jì)法與有限元法相結(jié)合,一臺(tái)符合世界太陽能汽車挑戰(zhàn)賽規(guī)則的YASA
摘要:
無軛分段電樞(YASA)拓?fù)浣Y(jié)構(gòu)已被認(rèn)為是太陽能汽車輪轂驅(qū)動(dòng)系統(tǒng)的研究熱點(diǎn)。通過將解析設(shè)計(jì)法與有限元法相結(jié)合,一臺(tái)符合世界太陽能汽車挑戰(zhàn)賽規(guī)則的YASA電機(jī)設(shè)計(jì)完成。電磁分析表明,該電機(jī)額定功率3.1kW,額定轉(zhuǎn)速1129rpm,最大扭矩26.2Nm。設(shè)計(jì)了油冷系統(tǒng),使電機(jī)運(yùn)行時(shí)的溫度保持在373K以下,外徑為160mm,軸向長度為80mm,能夠安裝在輪內(nèi)空間。設(shè)計(jì)完成后,建立了基于id=0磁場(chǎng)定向控制策略的驅(qū)動(dòng)系統(tǒng)。采用空間矢量脈寬調(diào)制技術(shù)實(shí)現(xiàn)三相變流器的開關(guān)。仿真結(jié)果表明,該系統(tǒng)具有良好的魯棒性和對(duì)速度參考信號(hào)的快速響應(yīng)。
關(guān)鍵詞:太陽能汽車;輪轂電機(jī);軸向磁通電機(jī)
In-wheel Drive Machine Design for Solar Powered Car
Wenjun Zhu
(University of Sheffield, Sheffield, S10 2TN, UK)
Abstract:The yokeless and segmented armature (YASA) topology has been considered of interest for the in-wheel drive system in a solar car. A YASA machine is designed by combined using of the analytic design method and the finite element method. The electromagnetic analysis shows the machine has rated power of 3.1kW, rated speed of 1129rpm and maximum torque of 26.2Nm. An oil cooling system is designed to keep the temperature of the machine under 373K. The outer diameter is 160mm and the axial length is 80mm which can fit in the in-wheel space. After the machine is designed, the drive system with id = 0 field orientated control strategy is build. Space vector pulse width modulation is applied to switch the 3-phase converter. Simulation of the drive system shows it is robust and it responses quickly to the speed reference signal.
Key words:solar powered car; in-wheel drive; axial flux machine
引言
世界太陽能汽車挑戰(zhàn)賽每年在澳大利亞舉行,是太陽能汽車領(lǐng)域重要的前沿技術(shù)探索賽事。
本文在太陽能汽車挑戰(zhàn)賽規(guī)則下,設(shè)計(jì)了一款太陽能汽車用輪轂電機(jī),具備了高效、輕便的特點(diǎn),為民用太陽能汽車的技術(shù)應(yīng)用做前期預(yù)研工作。采用定子無磁軛模塊化軸向磁通永磁電機(jī)的拓?fù)浣Y(jié)構(gòu),額定功率3.1kW,額定轉(zhuǎn)速1129rpm,最大扭矩26.2Nm。其可以安裝在15寸輪轂中,僅重約8.5kg。
1、設(shè)計(jì)指標(biāo)
世界太陽能汽車挑戰(zhàn)賽的Cruiser級(jí)別組為帶有6平方米太陽能板,可接外部充電,至少可搭載2名乘客的太陽能汽車[1]。圖1 展示了一款該組別參賽車輛。
圖1 世界太陽能汽車挑戰(zhàn)賽參賽車輛
太陽能汽車的整車電力驅(qū)動(dòng)系統(tǒng)結(jié)構(gòu)如圖2所示。
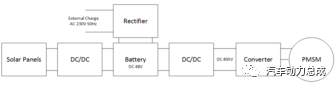
圖2 整車電力驅(qū)動(dòng)系統(tǒng)結(jié)構(gòu)
從太陽能電池板產(chǎn)生的電力經(jīng)過一個(gè)帶有最大功率點(diǎn)追蹤功能的DC/DC直流變換斬波器給蓄電池充電。電池電壓為48V。外部的230V,50Hz交流電源通過一個(gè)整流器變換為48V直流電,同時(shí)可以給電池充電。從電池端接出另一個(gè)DC/DC直流變換器,將48V電壓提升到400V直流母線。3相全橋變換器將400V直流母線轉(zhuǎn)換為3相交流電,驅(qū)動(dòng)永磁同步電機(jī)??紤]到在剎車時(shí),進(jìn)行動(dòng)能回收,從電機(jī)端到電池的DC/DC變換器和3相全橋變換器需要有雙向處理功率流的能力。
以一個(gè)典型的180/60 R15的輪胎為例,外徑為597mm。為了實(shí)現(xiàn)輕量化和簡(jiǎn)化結(jié)構(gòu),電機(jī)直接驅(qū)動(dòng)車輪,不采用任何變速裝置。那么為了達(dá)到120km/h的時(shí)速,電機(jī)的轉(zhuǎn)速就需要達(dá)到:
即電機(jī)的額定轉(zhuǎn)速至少需要達(dá)到1066rpm。
一般來說,6平方米的太陽能電池板可提供約1.8kW的功率[2]。在這些年里,越來越高效的太陽能電池板被開發(fā)并得到應(yīng)用,這使得在有限的面積上能夠提供更多的電力。有了更多的電力,就可以使用功率更大的電機(jī),可以提高車輛速度。文獻(xiàn)[3] 介紹了一種采用1140W太陽能電池板陣列的太陽能汽車,可以在白天陽光下維持穩(wěn)定速度為56-64km/h。而在2009年和2011年日本東海大學(xué)的東海挑戰(zhàn)者號(hào)汽車總共使用了面積為6平方米的太陽能電池,其性能是1.8kW的,能量轉(zhuǎn)換效率為30%[4]。1996年,文獻(xiàn)[5]介紹了一款0.6kW的太陽能汽車,采用無刷直流電動(dòng)機(jī),可載兩人,時(shí)速40km/h。90年代中期,因?yàn)檩S向磁通電機(jī)更高的效率,業(yè)界產(chǎn)生了一種從徑向磁通電機(jī)切換到軸向磁通電機(jī)的趨勢(shì)[6]。文獻(xiàn)[7] 介紹了一種采用無鐵心定子設(shè)計(jì)的太陽能汽車,消除了鐵耗,得到了世界領(lǐng)先的功率密度。除了太陽能電池板之外,外部充電可使用64kWh的電能。如果比賽能在38小時(shí)內(nèi)完成,可換算為功率。總計(jì),可用的功率為。假設(shè)電機(jī)效率為95%,并且功率電子器件的效率為95%,額定輸出功率為。
由于更輕的重量,更緊湊的變速器和更少的零件結(jié)構(gòu),輪轂電機(jī)成為了太陽能汽車首選的功率輸出裝置[8]。輪轂電機(jī)的體積應(yīng)該能夠安裝入車輪內(nèi)空間,這意味著電機(jī)最大直徑應(yīng)該小于381mm。同時(shí),為了給剎車和冷卻系統(tǒng)留出空間,最大軸向長度應(yīng)保持在80mm以內(nèi)。
2、YASA電機(jī)設(shè)計(jì)
無軛分段電樞(YASA)電機(jī)是近年來發(fā)展起來的一種軸向磁通永磁電機(jī)。YASA電機(jī)沒有定子磁軛,高填充因數(shù)和短端繞組,這些特點(diǎn)提高了扭矩密度和電機(jī)效率。因此,這種拓?fù)浣Y(jié)構(gòu)非常適合適用于高性能應(yīng)用。與其他軸向磁通電機(jī)相比,定子中的鐵用量通常可以減少50%,扭矩密度增加約20%。
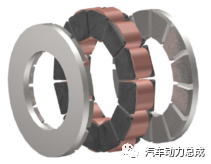
圖3 YASA電機(jī)結(jié)構(gòu)[9]
對(duì)于一個(gè)3相Y接的YASA電機(jī),其電壓公式為

磁鏈公式為
式中,和是每相的自感和互感,、和是永磁體在每相的磁鏈。
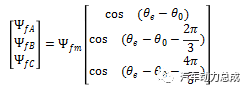
其中是永磁體的磁鏈幅值,是電角度,代表轉(zhuǎn)子的初始位置。
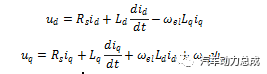
通過Park和Clark變換后,表示為軸上的直流量關(guān)系:
其等效電路為
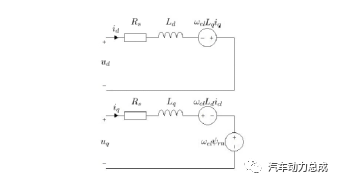
圖4 電機(jī)dq坐標(biāo)等效電路
假設(shè),則電磁轉(zhuǎn)矩為:
其中是極對(duì)數(shù)。
電壓和電流的約束為:
對(duì)于有限的和,額定的電角速度對(duì)應(yīng)于且的情況。轉(zhuǎn)速從零到額定轉(zhuǎn)速,永磁同步電動(dòng)機(jī)始終以供電,提供恒定扭矩。為了進(jìn)一步提高速度超過額定速度,需要引入一個(gè)負(fù)的分量電流,,來進(jìn)行弱磁運(yùn)行。這個(gè)轉(zhuǎn)矩特性如圖5所示。
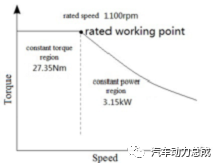
圖5 轉(zhuǎn)矩-轉(zhuǎn)速特性
三相全橋變流器將作為YASA機(jī)器的電源。它將400V直流轉(zhuǎn)變?yōu)橹寥嘟涣?,如圖6所示。
圖6 三相全橋變流器
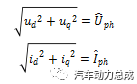
假設(shè)在額定工作點(diǎn)時(shí)變流器的PWM調(diào)制比,直流母線電壓,所以輸出的一相交流電峰值和RMS值為
選取極對(duì)和定子段數(shù)
理想的氣隙磁通如圖7所示。
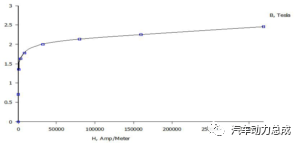
圖7 氣隙磁通
根據(jù)傅立葉變換,假設(shè)磁鐵覆蓋磁極長度的2/3。

氣隙的軸向長度應(yīng)盡可能小,以在獲得理想的氣隙磁通的前提下盡可能減少永磁體的使用。實(shí)際上,是在電機(jī)制造安裝中一個(gè)慣用的假設(shè)。
轉(zhuǎn)矩可以計(jì)算出
使用永磁體的剩磁,在YASA電機(jī)中磁路和磁路等效電路如圖8。
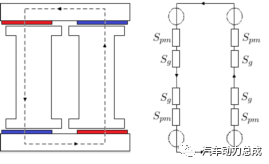
圖8 磁路和磁路等效電路
在這個(gè)設(shè)計(jì)中,永磁體厚度為1.87mm。
磁鏈在轉(zhuǎn)子鐵心中的示意圖如圖9。
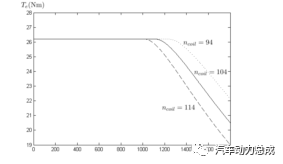
圖9 轉(zhuǎn)子磁路
轉(zhuǎn)子鐵芯由層疊硅鋼片構(gòu)成,其磁化曲線如圖10。
圖10 硅鋼片磁化曲線
為了防止磁飽和,設(shè)置轉(zhuǎn)子鐵心中的。轉(zhuǎn)子鐵心的厚度還需要保持一定的機(jī)械強(qiáng)度,這里設(shè)置其厚度為9.5mm.
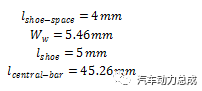
定子段的結(jié)構(gòu)如圖11。
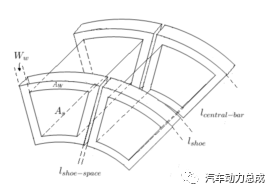
圖11 定子結(jié)果示意圖
其中
線圈中感應(yīng)反電動(dòng)勢(shì)的相移可以表示為:
其中是線圈指數(shù),范圍從1到。反電勢(shì)相量圖如圖12所示。
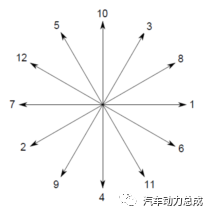
圖12 反電勢(shì)相量圖
為了使不平衡軸向力最小化,兩個(gè)相位差為180度電角度的線圈應(yīng)串聯(lián)。線圈的連接如圖13所示。
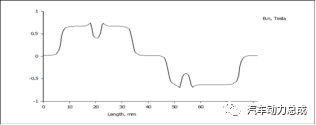
圖13線圈連接示意圖
每個(gè)定子中心柱周圍的繞組空間如圖所示。
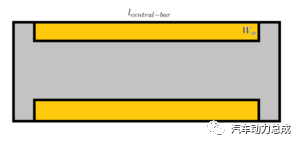
圖14定子繞組示意圖
假設(shè)填充因子為70%,電流密度為??偟挠行Ы孛骐娏鳛?
3、有限元仿真
在FEMM軟件中對(duì)設(shè)計(jì)的YASA電機(jī)進(jìn)行有限元仿真分析。
當(dāng)沒有電流時(shí),磁鏈密度分布如圖15所示。
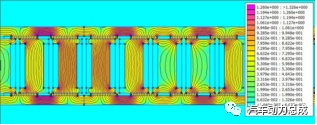
圖15無電流時(shí)的磁密分布
鐵芯內(nèi)無飽和現(xiàn)象。氣隙磁通密度如圖所示。小于預(yù)期的,這可能導(dǎo)致產(chǎn)生的扭矩偏小。
圖16 FEA中的氣隙磁通密度
繪制出不同繞組圈數(shù)下的轉(zhuǎn)矩-轉(zhuǎn)速特性,如圖17所示。
圖17 不同繞組圈數(shù)對(duì)應(yīng)的轉(zhuǎn)矩-轉(zhuǎn)速特性
根據(jù)額定轉(zhuǎn)速和額定功率的設(shè)計(jì)指標(biāo),選擇,此時(shí)
額定機(jī)械功率輸出為

在本設(shè)計(jì)中

所有的損耗最終都會(huì)變成熱能來提高溫度。高溫會(huì)增加繞組電阻,減少永磁體剩磁,甚至失去磁性。所以需要把電機(jī)在所有工作條件下的溫度保持在一定范圍內(nèi)。通常,自然冷卻和強(qiáng)制冷卻是兩種電機(jī)冷卻方式。在一些自然環(huán)境惡劣的沙漠地區(qū),環(huán)境溫度可能高達(dá)313K。這對(duì)電機(jī)的冷卻是一個(gè)很大的挑戰(zhàn)。
如果采用定子段中央單根直徑油管的油冷方式,油液流速需要達(dá)到。此時(shí)溫度分布如圖18所示。
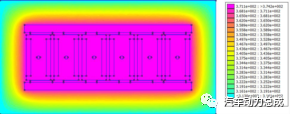
18 采用中央油管冷卻的溫度分布
4、結(jié)束驅(qū)動(dòng)控制策略仿真語
電機(jī)的額定轉(zhuǎn)速對(duì)應(yīng)于車輛時(shí)速,因此大部分工況下,電機(jī)將低于額定速度運(yùn)行。的控制策略由于其簡(jiǎn)單和無退磁風(fēng)險(xiǎn)的優(yōu)勢(shì),在這個(gè)項(xiàng)目中是適用的,其控制策略結(jié)構(gòu)如圖19所示。
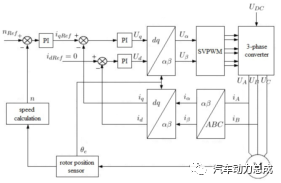
圖19 的電機(jī)控制策略結(jié)構(gòu)圖
在MATLAB中搭建如圖20所示的電機(jī)驅(qū)動(dòng)系統(tǒng)仿真模型
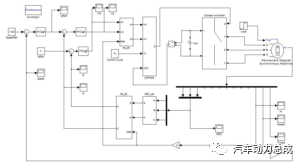
圖20 電機(jī)驅(qū)動(dòng)系統(tǒng)仿真模型
額定負(fù)載下,從靜態(tài)啟動(dòng)到額定轉(zhuǎn)速的啟動(dòng)曲線如圖21所示。
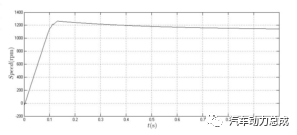
圖21 電機(jī)啟動(dòng)曲線
5、結(jié)束語
根據(jù)世界太陽能汽車挑戰(zhàn)賽的規(guī)范,提出了該電機(jī)的設(shè)計(jì)目標(biāo)。它是預(yù)計(jì)YASA電機(jī)的額定功率應(yīng)為3.15kW,額定轉(zhuǎn)速超過1066rpm。在幾何約束條件下,外徑應(yīng)小于381mm,軸向長度應(yīng)小于80mm。設(shè)計(jì)過程采用解析設(shè)計(jì)法和有限元法進(jìn)行迭代分析。最終設(shè)計(jì)被認(rèn)為能夠成功地滿足要求額定功率3.1kW,額定轉(zhuǎn)速1129rpm,最大扭矩26.2Nm。該電機(jī)的體積約為1.6L,主動(dòng)質(zhì)量約為8.5kg,提供動(dòng)力密度為1.926W/m3或0.3645kW/kg,需要強(qiáng)制冷卻系統(tǒng)。本文提出了油冷卻系統(tǒng),使電機(jī)在額定工作點(diǎn)時(shí)溫度保持在373K以下。整個(gè)設(shè)計(jì)滿足了設(shè)計(jì)指標(biāo),為太陽能電動(dòng)汽車的輪轂電機(jī)提供了一種技術(shù)方案。
參考文獻(xiàn):
[1]WSC.2015regulations.http://www.worldsolarchallenge.org/team_info/2015_regulations, 2015.
[2] Lovatt, H.C , Ramsden, et al. Design of an in-wheel motor for a solar-powered electric vehicle[J]. Electric Power Applications, IEE Proceedings, 1998.
[3] King RJ . Recent solar car technology developments including Australian World Solar Challenge results[C], IEEE Photovoltaic Specialists Conference. IEEE, 2002.
[4] Barrit D , Salih-Alj Y . Ralos car: Solar powered car with a hybrid backup system[C], Industrial Electronics & Applications. IEEE, 2012.
[5] M, Hammad, and, et al. Energy parameters of a solar car for Jordan[J]. Energy Conversion & Management, 1996.
[6] Zaher R A , Groot S D , Polinder H , et al. Comparison of an axial flux and a radial flux permanent magnet motor for solar race cars[C], XIX International Conference on Electrical Machines. IEEE, 2010.
[7] Nogita K , Kennedy J , Amsler J , et al. Lead-free solders for solar and electric vehicles - Reflections on The Bridgestone World Solar Challenge 2013 in "Arrow1"[C], 2014 International Conference on Electronics Packaging (ICEP). IEEE, 2014.
[8] Wang J , Zhang X , Kang D . Parameters design and speed control of a solar race car with in-wheel motor[C], Transportation Electrification Conference & Expo. IEEE, 2014.
[9] Woolmer T J , M.D. McCulloch. Analysis of the Yokeless And Segmented Armature Machine[C], IEEE International Electric Machines & Drives Conference. IEEE, 2007.
文章中引用數(shù)據(jù)和圖片來源網(wǎng)絡(luò)
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 79



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
