




 廣告
廣告





















































基于四輪轉(zhuǎn)向和直接橫擺力矩控制的自主地面車輛LPV/H∞路徑跟蹤控制器設計
2022-03-01 20:37:54· 來源:同濟智能汽車研究所

其中B表示車輛軌跡,

表示每個輪胎的縱向力。
假設在高車速下輪胎側(cè)偏角很小,輪胎側(cè)向力與輪胎側(cè)偏角之間的關系可以表示為線性關系,可以寫為
其中

和

分別是前后輪胎的側(cè)偏剛度。

和

為前后輪胎側(cè)偏角,定義為

假設在高車速時前輪和后輪轉(zhuǎn)向角較小,公式(1)近似于

?;诠剑?)和(4),公式(1)描述的車輛模型可以簡化為線性動力學方程,推導為


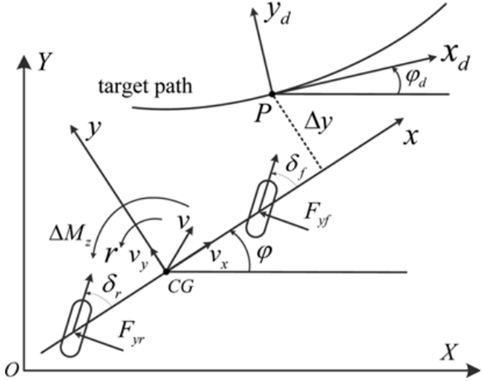
圖1 4WIS-4WIDEV平面運動模型
對于路徑跟蹤控制器的設計,4WIS-4WID EV的路徑跟蹤模型為圖2所示的單軌模型。并在圖2中展示了三種坐標系。

車身坐標系表示車輛在其實際路徑上的方向,

坐標系表示車輛在其目標路徑上的方向,

坐標系為大地坐標系。為使車輛能夠精確地跟蹤目標路徑,路徑跟蹤問題在本文中等價于使航向角誤差
和側(cè)向位置誤差

最小。
航向角誤差定義為實際航向角

和目標航向角
的差,即為

將式(6)兩邊對時間求導,得

其中
是目標路徑的曲率半徑。
另外,側(cè)向位置誤差
定義為目標路徑點P到軸x的垂直距離,其導數(shù)為
圖2 路徑跟蹤單軌模型
由式(5)、(7)和(8)得路徑跟蹤模型為:

其中





 廣告
廣告 編輯推薦




最新資訊
-
聯(lián)合國法規(guī)R60對兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標準立項|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評價開始從“電池單體性能指標”轉(zhuǎn)
2026-03-04 11:38
