




 廣告
廣告





















































基于四輪轉(zhuǎn)向和直接橫擺力矩控制的自主地面車輛LPV/H∞路徑跟蹤控制器設(shè)計(jì)
2022-03-01 20:37:54· 來(lái)源:同濟(jì)智能汽車研究所

2.2. 多面體模型
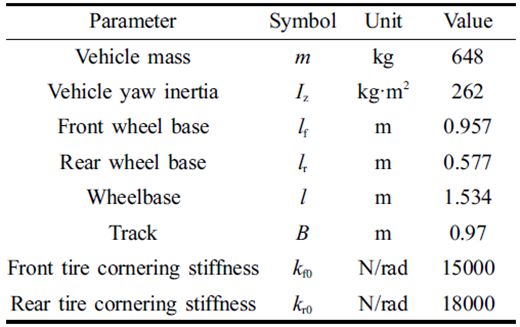
由于車輛縱向速度和輪胎側(cè)偏剛度對(duì)車輛操縱穩(wěn)定性有顯著影響,為使車輛獲得更好的動(dòng)態(tài)性能,這里基于時(shí)變但可測(cè)量或可觀察的參數(shù)構(gòu)建線性變參數(shù)(LPV)模型??紤]到輪胎側(cè)偏剛度主要受路面摩擦系數(shù)的影響,因此可以將輪胎側(cè)偏剛度的不確定性轉(zhuǎn)化為路面摩擦系數(shù)的不確定性。因此,實(shí)際的前后輪胎側(cè)偏剛度可以表示為

和
,其中
為路面摩擦系數(shù),
和

為前后輪胎的名義側(cè)偏剛度,因此輔助時(shí)變參數(shù)可選為
,
和

。表示參數(shù)變化的向量為

用于設(shè)計(jì)控制器的LPV系統(tǒng)可描述為:

其中
此外,矩陣
、

和

的仿射模型可以表示為

其中




由于

,變參向量有以下八種組合:
基于不同變參向量

,公式(11)為:

其中
表示最小或最大。
因此,控制系統(tǒng)(10)的具有八個(gè)頂點(diǎn)的多面體模型可以表示為:

其中

為八個(gè)頂點(diǎn)的權(quán)重,并且遵循以下條件

可以選擇為

的連續(xù)函數(shù),與

的頂點(diǎn)值、測(cè)量或估計(jì)的車輛縱向速度和輪胎側(cè)偏剛度有關(guān)。為簡(jiǎn)化起見(jiàn),八個(gè)頂點(diǎn)的權(quán)重為(Jin et al., 2016):
其中
3 控制系統(tǒng)設(shè)計(jì)
3.1. 總體控制框架
4WIS-4WID EV的路徑跟蹤控制系統(tǒng)框圖如圖3所示。路徑跟蹤控制系統(tǒng)主要由兩部分組成:(1)縱向運(yùn)動(dòng)控制;(2)側(cè)向和橫擺運(yùn)動(dòng)控制??v向運(yùn)動(dòng)控制的目的是利用輪式電機(jī)產(chǎn)生的縱向力,使車輛達(dá)到理想的縱向運(yùn)動(dòng)響應(yīng)。期望縱向力由四個(gè)輪胎縱向力之和直接計(jì)算??紤]到縱向運(yùn)動(dòng)控制不是路徑跟蹤控制的重點(diǎn),本文主要研究了4WIS-4WID電動(dòng)汽車的側(cè)向和橫擺運(yùn)動(dòng)控制。側(cè)向和橫擺運(yùn)動(dòng)控制由4WS和DYC實(shí)現(xiàn)。利用所提出的LPV/H∞控制器計(jì)算了前、后轉(zhuǎn)向角信號(hào)和外橫擺力矩信號(hào)。然后,利用單軌模型的前后轉(zhuǎn)向角信號(hào),根據(jù)Ackerman轉(zhuǎn)向幾何模型計(jì)算出每個(gè)車輪的轉(zhuǎn)向角。根據(jù)DYC的外橫擺力矩信號(hào)和縱向運(yùn)動(dòng)控制所需的縱向力,根據(jù)控制分配算法計(jì)算出各車輪的驅(qū)動(dòng)力矩。
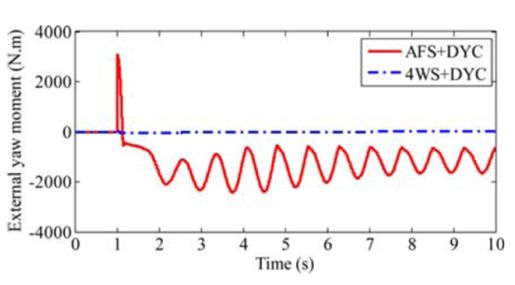
圖3 4WIS-4WID電動(dòng)汽車路徑跟蹤控制系統(tǒng)圖
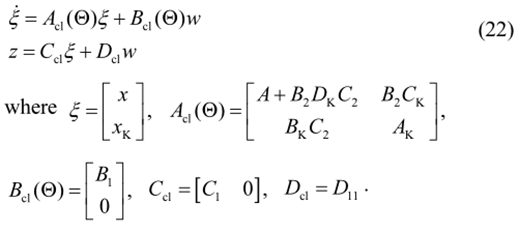
3.2 LPV/H∞控制器設(shè)計(jì)
對(duì)于控制器設(shè)計(jì),在控制系統(tǒng)

點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 52



 廣告
廣告 編輯推薦




最新資訊
-
開(kāi)年豪擲1.8億搶用戶,又一車企加入“價(jià)格
2026-03-04 16:05
-
聯(lián)合國(guó)法規(guī)R60對(duì)兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項(xiàng)|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
