




 廣告
廣告





















































基于邊緣的自動駕駛導航定位公司Civil Maps實現(xiàn)了5cm城區(qū)高精定位
2019-02-23 15:05:05· 來源:智車科技

在2018年國際消費電子展上,Civil Maps推出了一款名為 CityScaleHDMaps 的新產(chǎn)品,并展示了實現(xiàn)城市規(guī)模高清制圖業(yè)務(wù)的一些核心功能。
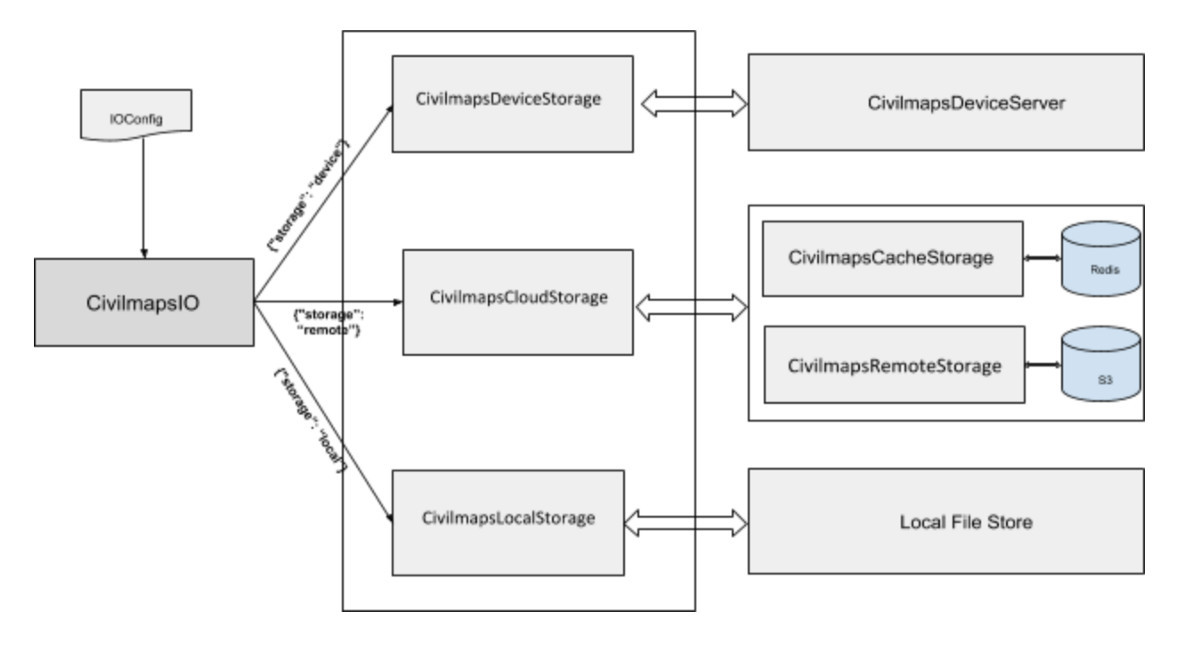
CityScaleHDMaps 的存儲框架是3種不同類型系統(tǒng)之間的復雜抽象。首先將Redis用作內(nèi)存緩存,這是將數(shù)據(jù)移入CPU的L1和L2緩存或GPU內(nèi)存的最快方法之一。Redis上面的第二層是邊緣分布式文件系統(tǒng),它使用Ceph在我們的私有云中通過網(wǎng)絡(luò)在服務(wù)器之間移動數(shù)據(jù),最后我們與AmazonSimpleStorageService(S3)同步,在所有邊緣站點上擁有持久的分布式存儲。存儲抽象是開發(fā)人員讀取和寫入數(shù)據(jù)管理層的無縫接口。能夠快速更改技術(shù)或數(shù)據(jù)同步架構(gòu),而不會影響應(yīng)用程序?qū)?。通過抽象,重構(gòu)的代碼變得很少。
傳統(tǒng)上,LoopClosure管道使用地面控制點將點云錨定到參考點,該參考點建立特定特征和對象的地面真實位置。這些地面控制點通常由專業(yè)測量員收集。在CivilMaps,利用機器視覺技術(shù)實現(xiàn)了閉環(huán)的自動化,實現(xiàn)了5CM的全球地理定位精度。
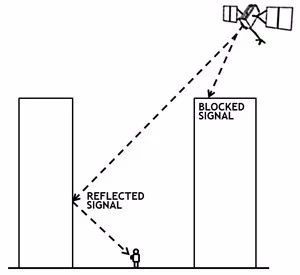
RTK GPS傳感器在復雜的城市環(huán)境中無法生成可靠的位置信息。傳感器數(shù)據(jù)在穿過城市某些地方會漂移,這會產(chǎn)生復雜性。通常,高層建筑會為GPS創(chuàng)建多路徑問題。即使使用差分GPS天線,性能也很差,特別是在舊金山這樣的城市。
除了RTK GPS之外,還有傳感器融合技術(shù)使用視覺里程計融合相機,LiDAR和IMU傳感器來創(chuàng)建校正軌跡。然而,由于GPS信號不良,IMU傳感器本身的輸入質(zhì)量非常差。這種方法有其局限性,充其量只是對現(xiàn)實世界中地面實況位置的估計。

CivilMaps 引入了一種新穎的循環(huán)閉合方法和技術(shù)。利用機器視覺,同時使用航空影像和航空LiDAR作為參考共享坐標系。這更有利的原因是由于慣性系統(tǒng)在飛機上,而不是在高層建筑旁邊的地面上。如果慣性系統(tǒng)在天空中,并且上面的衛(wèi)星具有清晰的視線,則GPS誤差和IMU漂移會大大減少。從而獲得非常精確的軌跡信息,可以使用30-50個地面控制點對大約1,000線性公里的道路網(wǎng)絡(luò)進行校正,而陸地唯一的環(huán)路閉合則是每100米一次。這是地面實況要求的一個數(shù)量級減少。CivilMaps 利用航空三角測量的航空數(shù)據(jù)集來創(chuàng)建一個非常準確的共享坐標系。共享坐標系是地面實況地理參考數(shù)據(jù)集,它能夠融合來自多個源的點云。
駕駛飛機獲取高精度低分辨率點云數(shù)據(jù),這只是創(chuàng)新的一部分。利用圖像和激光雷達的組合,通過尋找空中點云和地面點云之間的共同特征來獲得XYZ校正。得到修正后,將修正融合到里程軌跡中,得到精度為5cm的修正軌跡。
很少有地圖繪制公司可以聲稱精確度達到5厘米,目前基于地面控制和復雜RTK軌跡的大多數(shù)基礎(chǔ)地圖的精確度在15厘米到25厘米之間。然而,使用地面RTK的精度測量在復雜的城市環(huán)境中是不可信的。地面ONLY方法不起作用,有太多變量可能會破壞傳感器融合或驗證方法的質(zhì)量。RTK協(xié)方差的誤報是導致傳感器融合質(zhì)量差的首要原因。RTK的協(xié)方差不可信,因為生成軌跡的解決方案基本上是衡量它自身的準確性。
CivilMaps 發(fā)布的視頻中,在相互正交地比較獨立的數(shù)據(jù)集,其中一個被證明是高度準確的,不容易受到GPS漂移的影響,因為樹木、建筑物或加速度的快速變化。通過這種方法,將每次地面旅行集成到通過航空圖像+航空激光雷達數(shù)據(jù)集創(chuàng)建的共享坐標系統(tǒng)中,以創(chuàng)建一流的基礎(chǔ)地圖。這為創(chuàng)建可伸縮的城市高清地圖提供了新的可能性。
循環(huán)閉合后,CivilMaps 繼續(xù)進行特征提取,將地圖劃分為單獨的地理空間區(qū)域。通過AirFlow使用mapreduce;各個docker容器獲取在循環(huán)閉包后發(fā)布的參考點云數(shù)據(jù)以提取功能。此特征提取過程提取相關(guān)的通道特征和幾何,以創(chuàng)建地圖所需的矢量幾何圖形。
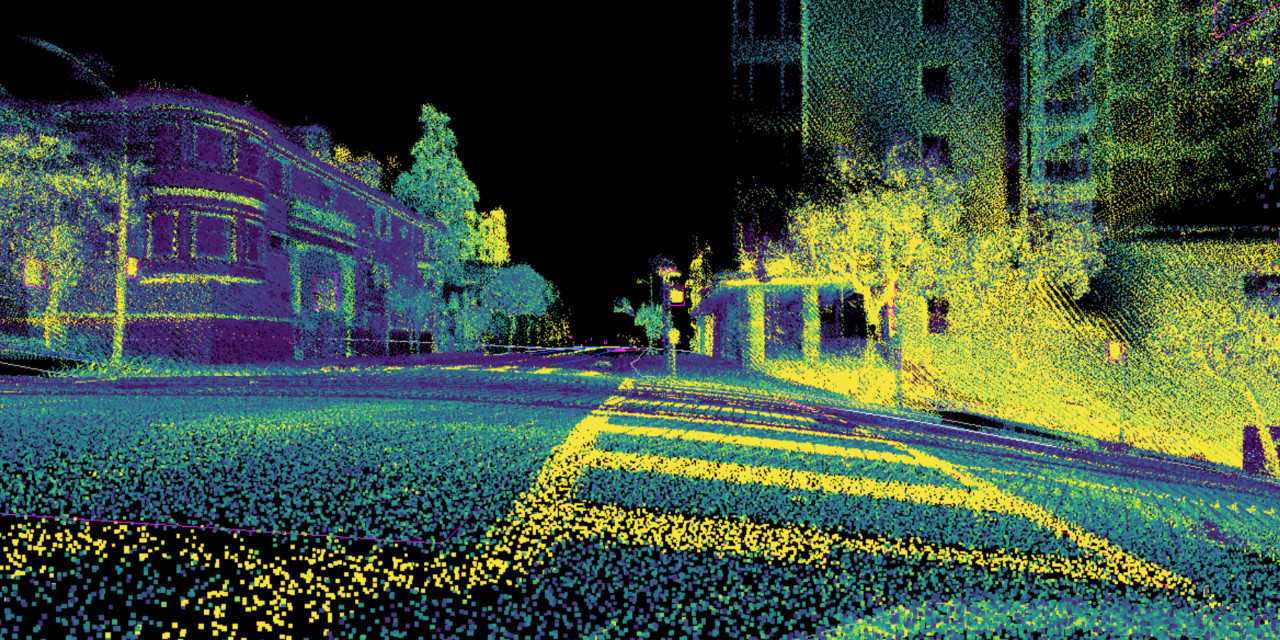
創(chuàng)建矢量圖層后,在Unity中使用3D光線投射的單獨作業(yè)會創(chuàng)建相鄰的通道語義。最后發(fā)布到Web服務(wù)中以供使用。城市規(guī)模的高清地圖由于其大尺寸而可以是幾兆兆字節(jié)的數(shù)據(jù)。CivilMaps將HD地圖中的原始點云數(shù)據(jù)稱之為指紋基礎(chǔ)地圖的數(shù)據(jù)。指紋基礎(chǔ)地圖是原始點云數(shù)據(jù)的編碼版本,比原始點云數(shù)據(jù)小10,000倍。
通過“6D定位”,即6個自由度,因為汽車將知道它的運動軌跡,也知道它的當前姿態(tài)。有了這些信息,汽車就可以定位自己,然后將對應(yīng)的地圖數(shù)據(jù)投射到傳感器的視場中,傳感器就可以把注意力集中在特定的區(qū)域,而忽略其他區(qū)域。Civil Maps認為這樣做的好處是,知道要看哪里可以節(jié)省汽車的計算時間和計算資源,否則就需要反復重復對周圍環(huán)境進行識別以及與地圖進行對比的過程。
Civil Maps使用的增強現(xiàn)實標注方式也是現(xiàn)在大家的常用方式,這種方式相對于激光點云數(shù)據(jù),更容易被常人理解。Civil Maps并沒有使用昂貴的GPU,而是在ARM Cortex上就可以運行這套程序。目前該公司已獲得福特汽車公司,上汽集團,Motus Ventures,Stanford-StartX 基金以及許多其他杰出投資者的資助。



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
