




 廣告
廣告





















































Mobileye 自動駕駛
2020-06-25 10:56:29· 來源:英特爾中國

對于自動駕駛這種未來詞匯而言,很多人的感受可能都來自于科幻電影中的橋段。而現(xiàn)實中,人們能夠體驗的自動駕駛場景,基本還是類似ACC自適應巡航這些輔助駕駛的
對于自動駕駛這種“未來詞匯”而言,很多人的感受可能都來自于科幻電影中的橋段。
而現(xiàn)實中,人們能夠體驗的“自動駕駛”場景,基本還是類似ACC自適應巡航這些輔助駕駛的功能,通過汽車裝載的雷達以及攝像頭,來實現(xiàn)定速巡航、車距車道保持以及方向調整等操作,來減緩駕駛員疲勞。
光說不練假把式?。”緛砣藗儗τ谶@種未來技術就有很大的疑慮,在標志清晰、道路條件優(yōu)越并且單向行駛的高速上實現(xiàn)“低階”自動駕駛的難度系數(shù)并不大,如何應對復雜城市道路以及各種隨時發(fā)生的突發(fā)情況才是真正的考驗。

一直以來,對于自動駕駛而言,技術上的問題可能并不是主要的,信任或許是這項“未來技術”在實踐中面臨的最大的難題。那個看不見的“駕駛員”想要獲得大家的信任,本身就是一件很難的事情:把自己的生命托付給你一個不認識、看不見摸不著的“司機”,這事兒真的靠譜嗎?
英特爾旗下Mobileye用一段自動駕駛汽車上路全程紀實的視頻給出了自己的回答。
市區(qū)連續(xù)行駛 257KM
只為告訴你:靠譜
前不久,Mobileye公布一段全程紀實的視頻,記錄了Mobileye的自動駕駛汽車在耶路撒冷街道上連續(xù)行駛160英里(約257公里)期間的情景。

通過一架無人機來跟蹤拍攝,最后,加上駕駛位的攝像頭視角,以及車輛行進的3D地圖,三位一體的展示了英特爾的自動駕駛汽車是如何在更為復雜的城市道路中實現(xiàn)無人工干預行駛257公里的,以及面對動態(tài)變化的復雜路況的時候,“駕駛員”是如何決策的。

和在高速路上實現(xiàn)的自動駕駛不同,在這段視頻中我們可以看到非常復雜的城市自動駕駛場景:
無保護左轉、被迫超車、十字路口禮讓行人、識別路邊停泊的車輛并提前變道等在城市道路經(jīng)常會遇到的各種情況,相信新手司機們都深有體會。
來,我們一起來看看Mobileye是怎么做的。
復雜路況1:無保護左轉
只要涉及到轉向的操作,對于新手司機而言就是一個考驗。特別是在更為復雜的城市道路中,除了交通信號燈,還有各方的車輛情況。
Mobileye面臨的就是這樣一個復雜道路環(huán)境下的左轉情況,對向來車,測試車輛想讓路,但在行經(jīng)路線(右側)上停滿了車輛。
主動偏離設定路線,為來車讓行
一旦有車讓行,能夠迅速完成轉向
這時候,測試車輛的決策是:
把行經(jīng)路線向前挪了一點,一旦有機會,就能夠迅速實現(xiàn)轉向。
Mobileye自動駕駛汽車連續(xù)行駛257公里,部分紀實
復雜路況2:人車混走的單行道
在城市里開車,經(jīng)常會遇到的情況就是當你一不小心駛入一條很老的道路或者一些比較老舊的小區(qū)的內(nèi)部道路,狹窄的道路以及人車混走的情況讓你不得不打起12分的精神來應對。
Mobileye的測試車輛就面臨這種情況,駛入了一條非常狹窄的單行道:右側停滿車輛,僅剩左側的狹窄道路通行,并且有大量行人。
攝像頭會預判人的行為軌跡
這個時候,自動駕駛車輛的策略是:
通過視距攝像頭,來檢測行人,并等待看他是否要穿過馬路。一旦系統(tǒng)判斷這個人并不打算過馬路,自動駕駛車輛就會繼續(xù)行進。

前方司機表示:這里太窄了,可以檢測到他的車門打開
在左上角的屏幕中,你可以看到傳感器對于行人的判斷以及顏色代碼進行相應的變化。
Mobileye自動駕駛汽車連續(xù)行駛257公里,部分紀實
復雜路況3:駛入環(huán)島
環(huán)島路況是一個不管新老司機都非常緊張的駕駛環(huán)境,不僅各個方向都有駛入已經(jīng)行駛的車輛,而且很容易走錯。
在耶路撒冷,測試車輛就遇到了一個多車道環(huán)島路口,而且交通非常擁擠、環(huán)境復雜。即使是人類駕駛者走這個路口也是比較難的。
自動駕駛車輛果斷、安全的擠出路口,
甚至同時還能注意避讓行人。
復雜路況4:禮讓行人
斑馬線禮讓行人,這是非?;镜男熊嚩Y儀,人類駕駛員也能夠很好的做到這一點。但是Mobileye的測試車輛的預判以及決策可以做到更好。

在駛出環(huán)島的路口,自動駕駛測試車輛遇到了斑馬線,攝像頭很早(行人未踏入車道斑馬線)就捕捉到了行人過馬路的動作,提前進行了停車讓行。
靠譜的背后
怎樣?在英特爾的自動駕駛車輛在耶路撒冷完成了這么多的高難度動作之后,你有沒有對自動駕駛有更全面的認知?對于那個咱們看不見的“老司機”有沒有增多一層信任呢?如果還想體驗一下和它一起共度257公里,那不妨用以下視頻第一視角感受一下。
Mobileye自動駕駛汽車連續(xù)行駛257公里,部分紀實
這一切,離不開Mobileye多年的技術研究和布局。
感知系統(tǒng)冗余
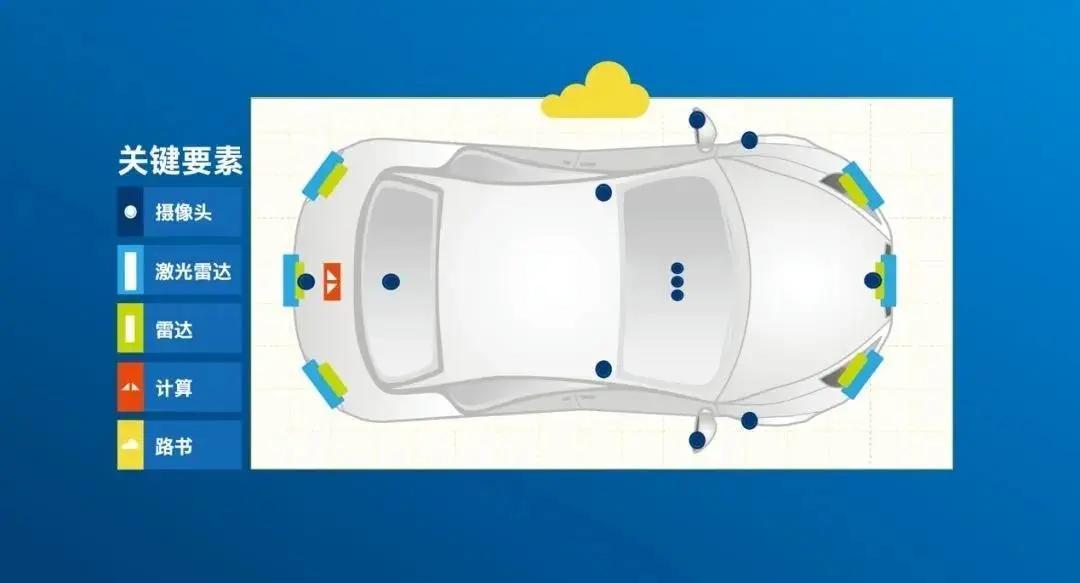
我們知道,自動駕駛的感知系統(tǒng)通常由攝像頭、雷達和激光雷達構成,再且通過軟件將傳感器的原始數(shù)據(jù)轉換為“環(huán)境模型”,這其中還需要特別包括其他道路使用者的位置和速度。
大部分的自動駕駛汽車廠商采用的都是這種傳感器融合的處理感知系統(tǒng),在只有一個系統(tǒng)的情況下,即使幾率極小,但是感知系統(tǒng)仍然會在某種特定情況下忽略掉道路使用者和無生命障礙物等在內(nèi)的相關物體的存在,或是錯誤地計算其尺寸,從而引發(fā)事故。
增加更多的傳感器貌似是一個可用的解決方案,但是Mobileye想了一個更聰明的辦法,來降低意外發(fā)生的概率:雙子系統(tǒng)冗余設計。
簡單說來,就是一臺車上基于攝像頭來構建一套完整的端到端自動駕駛,再使用雷達/激光雷達構建完全獨立的系統(tǒng)。如此一來,產(chǎn)生的冗余就能讓我們把犯錯幾率分布到兩個系統(tǒng)當中去。因此,通過擁有兩個獨立的子系統(tǒng)來實現(xiàn)非常低的出錯概率。這樣一來,安全性能夠得到大幅提升,因為如果一個分系統(tǒng)犯了錯,還有另一個系統(tǒng)進行兜底。

事實上,建一個純攝像頭的自動駕駛汽車要困難得多。眾所周知,攝像頭很難被利用,因為它對深度(范圍)的訪問是間接的,是建立在諸如透視、陰影、運動和幾何形狀這樣的線索之上的。
但是在視頻中,Mobileye的自動駕駛車輛車里既沒有雷達也沒有激光雷達,實際上,這輛車由8個遠距攝像頭和4個停車攝像頭提供感知支持,這些攝像頭的信息被輸入到僅由兩個EyeQ®5芯片支持的計算系統(tǒng)中。
在展示汽車行進的地圖顯示屏上,我們可以清楚的看到,所有的車輛和行人,不光做了識別分類,給出了3D的Bounding Box,還預測了每輛汽車和行人的路徑,準確度和實時性讓人吃驚。
責任敏感安全模型(RSS)
要讓“老司機”更加靠譜,除了依靠系統(tǒng)級的冗余設計,安全策略也是極為重要的。“駕駛員”如何通過眼睛以及傳感器獲取的信息來判斷駕駛的狀態(tài)和策略至關重要。
Mobileye的責任敏感安全模型(RSS)主要圍繞駕駛員的實際操作展開,通過諸如“路權是被賦予的,而不是爭奪來的”這樣的概念來建立度量參數(shù),以便讓自動駕駛汽車做出安全的決策。
RSS模型在可供假設的范圍內(nèi)假定了最壞的情況,即其他道路使用者會做出的最糟糕的動作是什么。這樣一來,自動駕駛車輛就不再需要對其他道路使用者的行為進行預測了。
RSS的理論證明,如果自動駕駛汽車遵循該理論所規(guī)定的假設和行為,那么自動駕駛汽車的決策大腦就永遠不會造成事故。也是從那時起,RSS在全球范圍內(nèi)得到了推廣。
總的來說, 自動駕駛的落地需要分階段實施。在數(shù)據(jù)積累的高精地圖和RSS系統(tǒng)支持下,可以在限定區(qū)域內(nèi)開展運行和試點。

盡管如此,Mobileye基于強大技術能力與技術儲備,通過極具前瞻性的構想,讓自動駕駛的車輛能夠在更為復雜的市內(nèi)公共交通區(qū)域長距離行進,并且留下了美妙的體驗。



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
