




 廣告
廣告





















































首頁(yè) > 汽車檢測(cè)行業(yè)資訊 > 正文
聯(lián)合國(guó)《自動(dòng)車道保持系統(tǒng)(ALKS)》法規(guī)(下)
2021-02-23 21:49:57· 來(lái)源:北京市高級(jí)別自動(dòng)駕駛示范區(qū) 作者:示范區(qū)

附錄2
制造商應(yīng)提供自動(dòng)車道保持系統(tǒng)的信息文件表格,以供審批
1. 系統(tǒng)描述:自動(dòng)車道保持系統(tǒng)
6.1 安全操作–車輛制造商聲明
6.2 軟件架構(gòu)概述(例如區(qū)塊圖)
6.3 確定實(shí)現(xiàn)系統(tǒng)邏輯的方法
6.4 概述“系統(tǒng)”中內(nèi)置的主要設(shè)計(jì)規(guī)定,以便在發(fā)生故障、運(yùn)行干擾以及超出ODD的計(jì)劃/意外狀況時(shí),車輛可以安全運(yùn)行并與其他道路使用者交互。
6.5 主要故障處理原則,應(yīng)變退回(Fallback)策略,包括風(fēng)險(xiǎn)緩解策略(最低風(fēng)險(xiǎn)策略)。
6.6 駕駛員、車輛乘員和其他道路使用者之間的互動(dòng),包括警告信號(hào)和需要將控制權(quán)交給駕駛員的要求。
6.7制造商確認(rèn)遵守本法規(guī)中另行規(guī)定的性能要求,包括目標(biāo)和事件探測(cè)及反應(yīng)(OEDR)、人機(jī)交互(HMI)、遵守交通規(guī)則,并確定該系統(tǒng)的設(shè)計(jì)方式不會(huì)對(duì)駕駛員、乘員和其他道路使用者造成不合理的風(fēng)險(xiǎn)。
附錄3
1. 本文件闡明了如何推導(dǎo)、確定自動(dòng)車道保持系統(tǒng)(ALKS)應(yīng)避免碰撞的情況。ALKS應(yīng)避免發(fā)生碰撞的情況由通用模擬程序確定,以及以下專注駕駛員行為模型和交通關(guān)鍵干擾場(chǎng)景中的相關(guān)參數(shù)。
3.3 為了確定自動(dòng)車道保持系統(tǒng)(ALKS)應(yīng)在哪些情況下避免發(fā)生碰撞,考慮到專注的駕駛員在使用ADAS時(shí)的行為模式,下表中“感知”、 “決策”和“反應(yīng)”的行為模型因素應(yīng)被用作ALKS性能模型。
圖1 熟練的人類表現(xiàn)模型
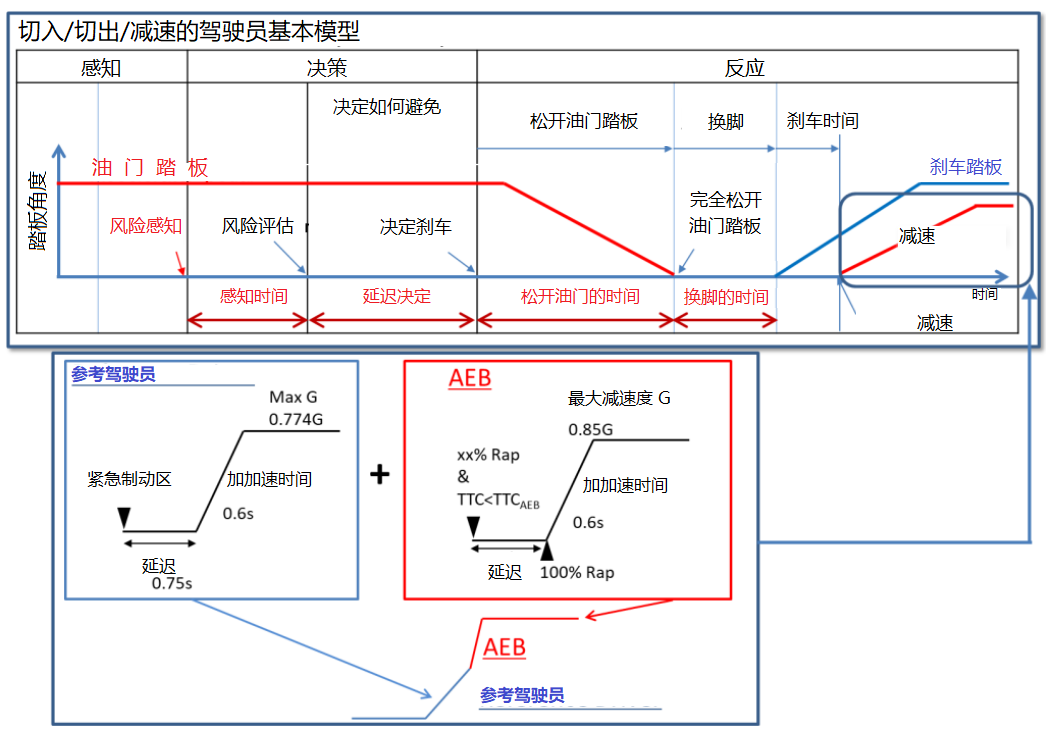
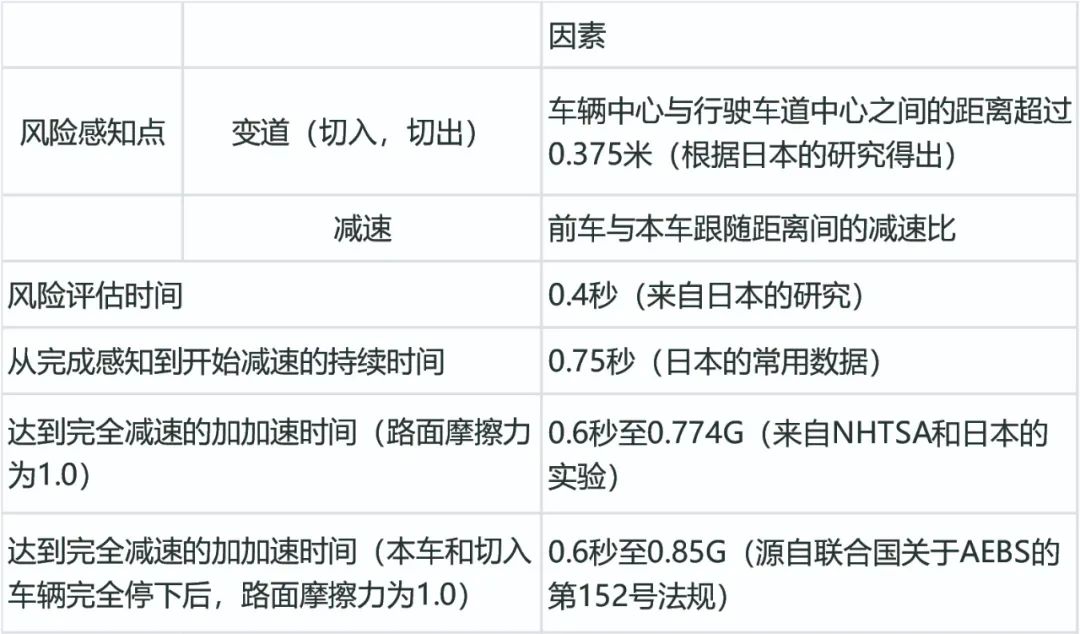
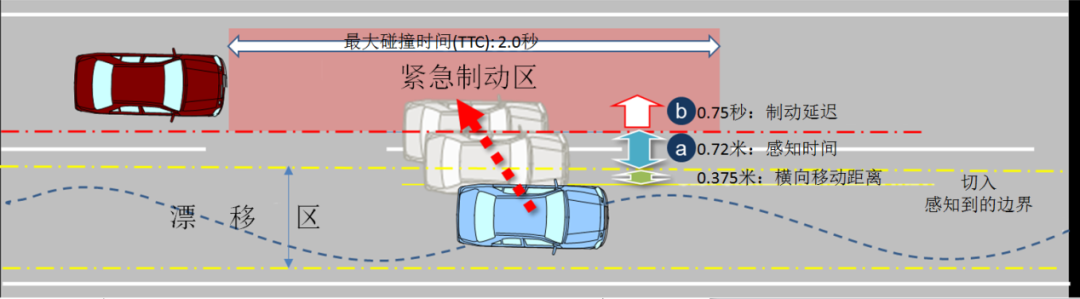
圖2 切入場(chǎng)景的駕駛員模型
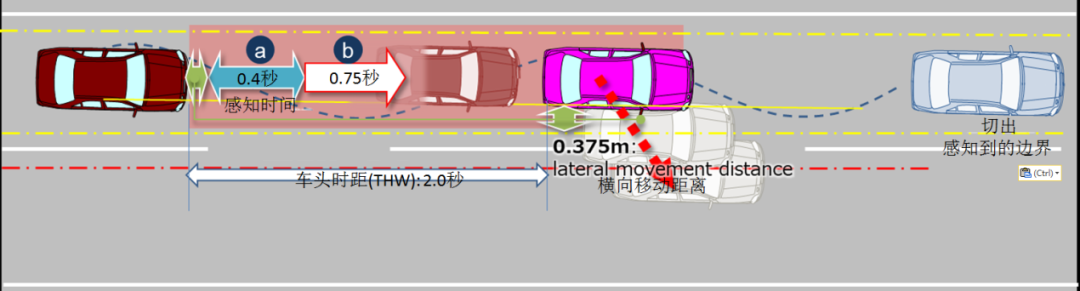
3.4.2. 針對(duì)切出場(chǎng)景:
通常,車輛在車道內(nèi)的橫向漂移距離為0.375米。
當(dāng)車輛超過(guò)正常的橫向漂移距離時(shí)(可能在實(shí)際變道之前)時(shí),可感知的切出邊界就會(huì)出現(xiàn)。風(fēng)險(xiǎn)感知時(shí)間[a]為0.4秒#,并且在前車超過(guò)切出邊界閾值時(shí)開始。
2秒的時(shí)間被定為最大車頭時(shí)距(THW),據(jù)此得出結(jié)論,存在縱向危險(xiǎn)。
注:THW = 2.0秒是根據(jù)其他國(guó)家的法規(guī)和準(zhǔn)則選擇的。
3.4.3. 針對(duì)減速場(chǎng)景:
風(fēng)險(xiǎn)感知時(shí)間[a]為0.4秒。當(dāng)前車超過(guò)減速閾值5m / s2時(shí),風(fēng)險(xiǎn)感知時(shí)間[a]開始。

4. 參數(shù)
4.1 在描述第2.1部分中的交通關(guān)鍵場(chǎng)景的模型時(shí),以下參數(shù)至關(guān)重要。
4.2 可以根據(jù)運(yùn)行環(huán)境添加其他參數(shù)(例如,道路的摩擦率,道路曲率,光照狀況)。

點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 141



 廣告
廣告 編輯推薦


最新資訊
-
聯(lián)合國(guó)法規(guī)R60對(duì)兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項(xiàng)|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評(píng)價(jià)開始從“電池單體性能指標(biāo)”轉(zhuǎn)
2026-03-04 11:38
