




 廣告
廣告





















































FAST-LIO2: 快速直接的激光雷達-慣性里程計
2021-09-12 21:53:49· 來源:同濟智能汽車研究所

圖10 翻轉過程中FAST-LIO2構建的實際環(huán)境和3D地圖
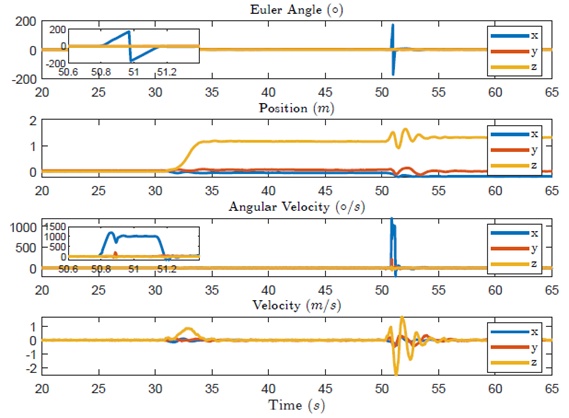
圖11 無人機翻轉實驗中的姿態(tài)、位置、角速度和線速度。
3)快速運動手持實驗:在這里,我們在具有大速度和角速度的富有挑戰(zhàn)性的快速運動中測試FAST-LIO2。在人行天橋上來回沖刺時,傳感器被握在手上(見圖12)。圖13顯示了快速運動手持實驗中的姿態(tài)、位置、角速度和線速度??梢钥闯?,最大速度達到了7m/s,角速度在±100度/秒左右變化。為了展示FAST-LIO2的性能,實驗在同一點開始和結束。本實驗的端到端誤差小于0.06m(見圖13),而總軌跡長度為81m。
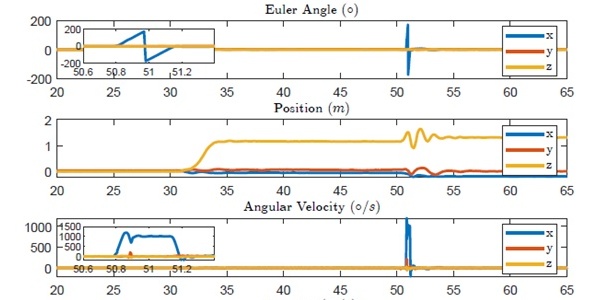
圖12 FAST-LIO2在快速運動手持實驗中的建圖結果。
圖13快速運動手持實驗中的姿態(tài)、位置、角速度和線速度。
C. 戶外飛行實驗
3D激光雷達的一項重要應用是機載測繪。為了驗證FAST-LIO2是否適用于這種可能的應用,我們進行了一次飛行實驗。我們部署了一架攜帶我們激光雷達傳感器的更大的無人機。該無人機配備GPS、IMU等飛行航電設備,可根據(jù)機載GPS/IMU導航進行航點自動跟蹤。需要注意的是無人機配備的GPS和IMU僅用于無人機導航,不用于FAST-LIO2,其僅使用來自LiDAR傳感器的數(shù)據(jù)。本實驗中LiDAR掃描速率設置為10Hz。在香港南生圍的香港濕地公園的多個地點進行了幾次飛行。實時建圖結果如圖14所示??梢钥闯鯢AST-LIO2在這些植被環(huán)境中效果很好??梢郧宄乜吹綐涔凇⒌缆飞系能嚨罉擞浐吐肪壥仍S多精細結構。圖14還顯示了FAST-LIO2計算的飛行軌跡。我們將這些軌跡與無人機車載GPS/IMU導航估計的軌跡進行了視覺比較,它們顯示出良好的一致性。由于技術上的困難,這里不提供GPS軌跡用于定量評估。最后,這三種環(huán)境每次掃描的平均處理時間分別為19.6ms、23.9ms和23.7ms。需要注意的是,LILI-OM在這三個數(shù)據(jù)序列中都失效了,因為在面向地面時提取的特征太少了。
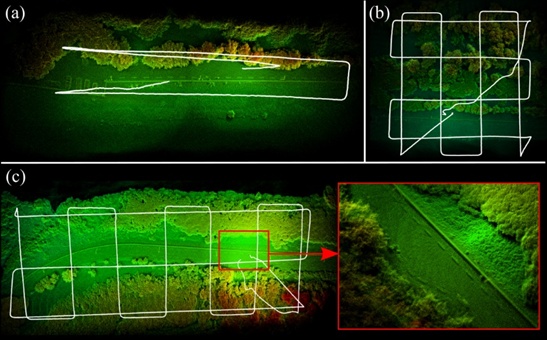
圖14 使用FAST-LIO2進行機載建圖的實時建圖結果。數(shù)據(jù)是由無人機在香港濕地公園收集的,該無人機帶有一個朝下的LivoxAvia激光雷達。飛行高度為30m(a)、30m(b)和50m(c)。
8 結論
本文構造了FAST-LIO2算法,這是一種直接且穩(wěn)健的LIO框架,其速度明顯快于當前最先進的LIO算法,同時在各種數(shù)據(jù)集上都體現(xiàn)了極大的競爭力或更好的準確性。速度的提高是由于去除了特征提取模塊和進行高效的建圖。我們開發(fā)并驗證了一種新穎的增量k-d樹(ikd-樹)數(shù)據(jù)結構,它支持動態(tài)點插入、刪除和并行重建。在開放數(shù)據(jù)集中的大量實驗表明,所提出的ikd-樹,對于在激光雷達里程計中的kNN搜索,可以在最新數(shù)據(jù)結構中實現(xiàn)最佳的整體性能。由于制圖效率的提高,在快速運動和稀疏場景中的準確性和魯棒性也通過在里程計中使用更多點而被提高。FAST-LIO2的另一個好處是,由于去除了特征提取,因此它自然適用于不同的LiDAR,而特征提取必須根據(jù)其各自的掃描模式和密度為不同的LiDAR精心設計。
致謝
本項目由大疆(200009538)資助支持。作者感謝大疆提供的資金支持和Livox科技在整個工作過程中提供的設備支持。作者要感謝Ambit-Geospatial在戶外空中實驗中的幫助。作者還感謝ZhengLiu、GuozhengLu和FangchengZhu的有益討論。
附錄
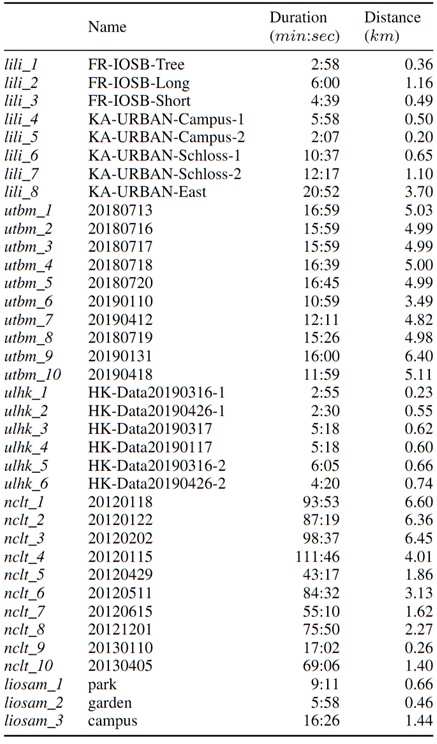
第VI部分中使用的所有37個序列的詳細信息列于表8中。
表8 基準的所有序列的詳細信息
參考文獻



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
