




 廣告
廣告





















































P2 架構(gòu)混合動(dòng)力控制策略概述
2021-11-13 18:38:00· 來源:EDC電驅(qū)未來

作者:賈林娜等丨哈爾濱東安汽車發(fā)動(dòng)機(jī)制造有限公司1.1 P2 構(gòu)架混合動(dòng)力本項(xiàng)目基于公司成熟發(fā)動(dòng)機(jī)4G15T 與六檔自動(dòng)變速器開發(fā)混合動(dòng)力系統(tǒng),系統(tǒng)基本信息如圖1
作者:賈林娜等丨哈爾濱東安汽車發(fā)動(dòng)機(jī)制造有限公司
1.1 P2 構(gòu)架混合動(dòng)力
本項(xiàng)目基于公司成熟發(fā)動(dòng)機(jī)4G15T 與六檔自動(dòng)變速器開發(fā)混合動(dòng)力系統(tǒng),系統(tǒng)基本信息如圖1 所示,動(dòng)力系統(tǒng)主要由 1.5T 發(fā)動(dòng)機(jī)、6AT 與 ISG 電機(jī)組成,發(fā)動(dòng)機(jī)與ISG 之間采用離合裝置K0 連接,屬于典型的 P2 混合動(dòng)力系統(tǒng)。該動(dòng)力系統(tǒng)提供自動(dòng)、純電、電量保持、手動(dòng)擋模式等多種駕駛模式,純電續(xù)駛里程大于50km,純電最高車速大于120km/h。
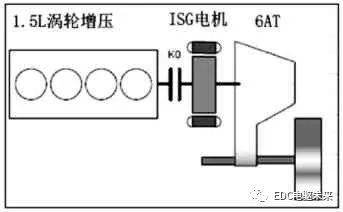
圖1 P2 混合動(dòng)力系統(tǒng)示意圖
1.2 CAN 總線網(wǎng)絡(luò)設(shè)計(jì)
控制器節(jié)點(diǎn)較多,CAN 總線網(wǎng)絡(luò)共設(shè)4 路CAN,分CAN網(wǎng)絡(luò)總體設(shè)計(jì)框架如圖2 所示。
動(dòng)力CAN 網(wǎng)絡(luò)主要實(shí)現(xiàn)HCU 與MCU、BMS、EMS、OPU 控制器間信息交互。
傳動(dòng)CAN 網(wǎng)絡(luò)主要由于TCU 使用的是傳統(tǒng)汽油機(jī)動(dòng)力總成TCU,為規(guī)避傳統(tǒng)EMS 與TCU 傳遞信息干擾,所以專設(shè)1路CAN 實(shí)現(xiàn)TCU 與HCU 信息交互。
儀表CAN 網(wǎng)絡(luò)主要實(shí)現(xiàn)車輛整體狀態(tài)信息顯示交互。
充電CAN 網(wǎng)絡(luò)主要實(shí)現(xiàn)BMS 與車載充電機(jī)信息交互。
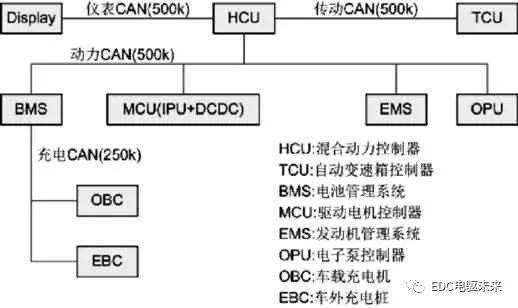
圖2 CAN 總線網(wǎng)絡(luò)設(shè)計(jì)框圖
2 控制策略
2.1 高壓上下電控制
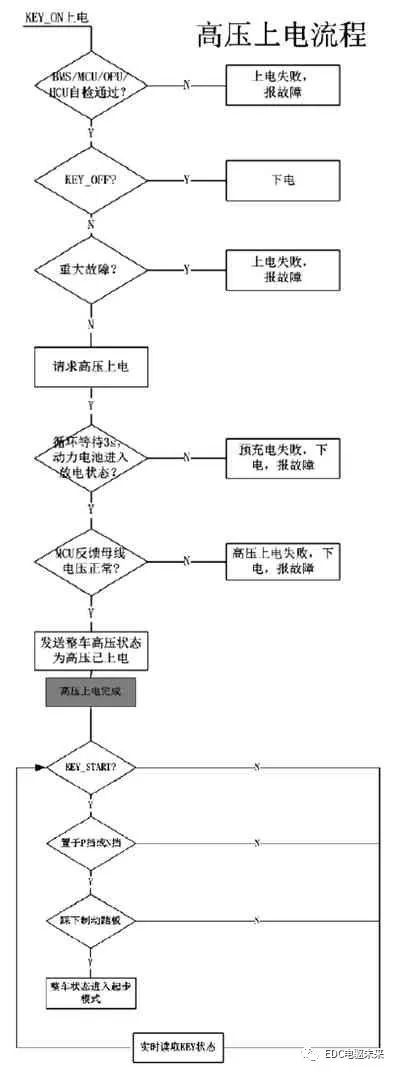
圖3 高壓上電流程
鑰匙開關(guān)開啟,整車控制器上電后,首先檢測(cè)檔位信號(hào)、鑰匙開關(guān)信號(hào)等駕駛員駕駛指令,并通過CAN 總線接收高壓系統(tǒng)部件的工作狀態(tài),執(zhí)行高壓上電檢測(cè),以判斷整車是否可以安全可靠地上高壓。整車上高壓之后,通過分析駕駛員操作指令和能源系統(tǒng)及動(dòng)力系統(tǒng)的工作狀態(tài)等,對(duì)整車進(jìn)行故障管理、行車模式調(diào)度、轉(zhuǎn)矩管理,并通過CAN 總線定時(shí)發(fā)送控制指令給執(zhí)行部件。整個(gè)高壓上電流程如圖3 所示。
當(dāng)車輛處于行車(起步/調(diào)速/超速)狀態(tài)下,鑰匙開關(guān)信號(hào)從ON 變?yōu)镺FF 或者致命故障需要下電時(shí),需要按照一定順序執(zhí)行高壓下電流程,以防電機(jī)反電動(dòng)勢(shì)燒毀空調(diào)等設(shè)備,整個(gè)高壓下電流程如下圖4 所示。
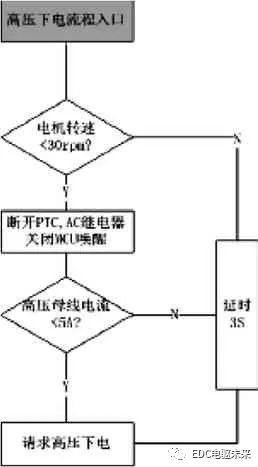
圖4 高壓下電流程
2.2 整車狀態(tài)控制
整車狀態(tài)管理主要依據(jù)當(dāng)前的鑰匙狀態(tài)、檔位狀態(tài)、制動(dòng)踏板狀態(tài)、電機(jī)轉(zhuǎn)速、車速、故障等級(jí)等整車狀態(tài)信息并結(jié)合項(xiàng)目中具體車輛,將整車狀態(tài)按工況分為5 種模式:停機(jī)模式、啟動(dòng)模式、起步模式、調(diào)速模式、超速模式,管理圖如圖5 所示。
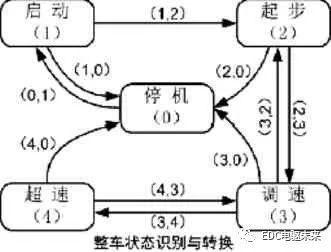
圖5 整車狀態(tài)管理
2.3 車輛運(yùn)行模式控制
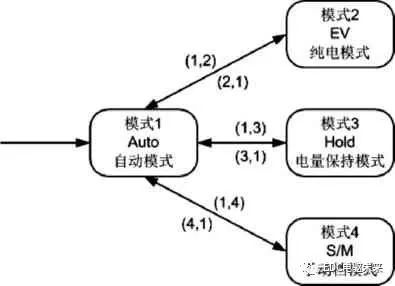
圖6 車輛運(yùn)行模式
適應(yīng)不同的駕駛需求,駕駛員通過觸發(fā)不同的模式開關(guān),進(jìn)入不同的車輛運(yùn)行模式以滿足自身需求,本項(xiàng)目車輛運(yùn)行模式分為四種:①Auto 即自動(dòng)模式,為車輛默認(rèn)的運(yùn)行模式;②EV 即純電 模式;③Hold 即電量保持模式;④S/M 即手動(dòng)擋模式。四種模式的轉(zhuǎn)換關(guān)系如圖6 所示。
2.4 能量流模式管理
本項(xiàng)目整車控制管理系統(tǒng)實(shí)現(xiàn)不同工況下混動(dòng)系統(tǒng)起停、純電、助力、能量回收、純發(fā)動(dòng)機(jī)驅(qū)動(dòng)等11 種混動(dòng)模式,各工況能量流模式如下圖7、8、9 所示:

圖7 待機(jī)工況能量流
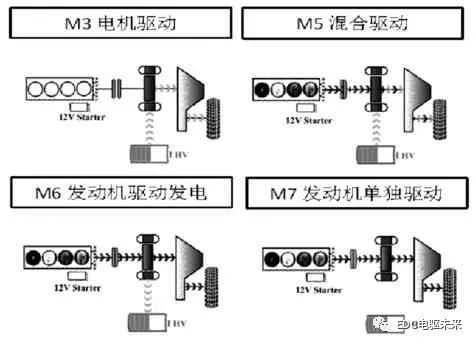
圖8 驅(qū)動(dòng)行駛工況能量流
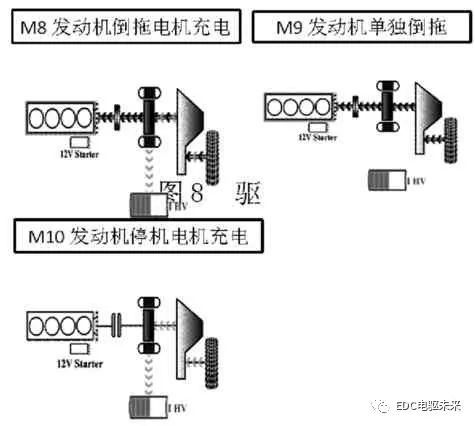
圖9 滑行制動(dòng)行駛工況能量流
2.5 不同模式下的扭矩分配管理和電池SOC 的控制策略
不同的車輛運(yùn)行模式下,采用不同的扭矩分配策略和SOC 控制策略。
本項(xiàng)目策略可實(shí)現(xiàn)純電模式、電量保持模式、手動(dòng)擋模式與自動(dòng)模式四種運(yùn)行模式,不同模式下電機(jī)與發(fā)動(dòng)機(jī)都處于工作狀態(tài)下的扭矩分配和SOC 控制策略進(jìn)行介紹。
2.5.1 純電(EV)模式
在電機(jī)持續(xù)功率能力范圍內(nèi)均采用純電運(yùn)行即在電機(jī)外特性曲線范圍內(nèi)保持電機(jī)驅(qū)動(dòng)模式,因此能量模式只有M3;當(dāng)SOC 降低至觸發(fā)低閥值時(shí)會(huì)自動(dòng)退出EV 模式,進(jìn)入AUTO 模式;在油門完全踩到底時(shí),系統(tǒng)判斷有大扭矩需求,退出EV 模式,進(jìn)入AUTO 全油門模式。EV 模式下能量管理如圖10。
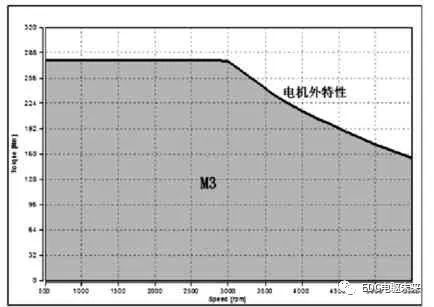
圖10 純電模式管理
2.5.2 自動(dòng)模式
待機(jī)工況:圍繞SOC 閥值,待機(jī)發(fā)電和發(fā)動(dòng)機(jī)怠速兩個(gè)能量流切換。
驅(qū)動(dòng)行駛工況:根據(jù)電量不同,能量及扭矩分配管理分為:高電量、中等電量和低電量三種情況,具體如下:
① 高電量情況,駕駛員需求扭矩在藍(lán)色區(qū)域?yàn)榧冸婒?qū)動(dòng)(M3);駕駛員需求扭矩在粉色區(qū)域?yàn)榘l(fā)動(dòng)機(jī)單獨(dú)驅(qū)動(dòng)(M7);駕駛員需求扭矩在藍(lán)色線與紫色線(系統(tǒng)最大扭矩)之間為混合驅(qū)動(dòng)(M5)。
② 中等電量情況,駕駛員需求扭矩在藍(lán)色區(qū)域?yàn)榧冸婒?qū)動(dòng)(M3)、發(fā)動(dòng)機(jī)驅(qū)動(dòng)并發(fā)電(M6)兩種能量流模式;駕駛員需求扭矩在粉色區(qū)域?yàn)榘l(fā)動(dòng)機(jī)單獨(dú)驅(qū)動(dòng)(M7);駕駛員需求扭矩在灰色以及綠色區(qū)域?yàn)榛旌向?qū)動(dòng)(M5),綠色曲線含義:混合驅(qū)動(dòng)(M5)受SOC 值減小的影響,電機(jī)逐步減小助力扭矩,當(dāng)SOC 降至低閥值,以發(fā)動(dòng)機(jī)外特性單獨(dú)驅(qū)動(dòng)。
③ 低電量情況,由于SOC 閥值較低,此時(shí)為了提高充電速度,抬高發(fā)動(dòng)機(jī)的發(fā)電扭矩,如圖11 中發(fā)動(dòng)機(jī)高效扭矩線,此時(shí)無論駕駛需求扭矩在落在哪個(gè)區(qū)域,都會(huì)起動(dòng)發(fā)動(dòng)機(jī)充電將SOC 拉高,從而執(zhí)行中等電量時(shí)的策略。
制動(dòng)、滑行工況:高壓蓄電池SOC 值高于一定閥值時(shí),禁止電機(jī)對(duì)電池充電,在SOC 值低于此閥值時(shí),制動(dòng)并進(jìn)行能量回收。
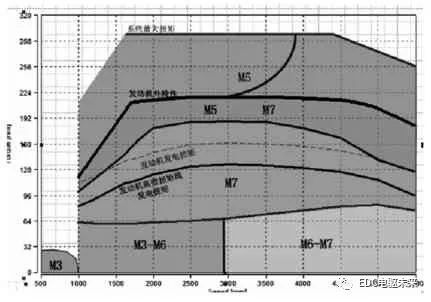
圖11 自動(dòng)模式管理
2.5.3 其他模式
手動(dòng)模式及電量保持模式在不同工況下能量流分配與自動(dòng)模式相同,即待機(jī)工況下,圍繞SOC 閥值,實(shí)現(xiàn)待機(jī)發(fā)電和發(fā)動(dòng)機(jī)怠速兩個(gè)能量流切換;其中手動(dòng)模式,因SM 模式下發(fā)動(dòng)機(jī)常運(yùn)轉(zhuǎn),起步時(shí)能量流均為M3-1 電機(jī)驅(qū)動(dòng)、發(fā)動(dòng)機(jī)怠速。驅(qū)動(dòng)行駛工況下,根據(jù)電量和駕駛需求扭矩落在不同區(qū)域來決定能量流形式;制動(dòng)工況,SOC 值低于過充保護(hù)閥值,制動(dòng)并進(jìn)行能量回收。
2.6 測(cè)試驗(yàn)證
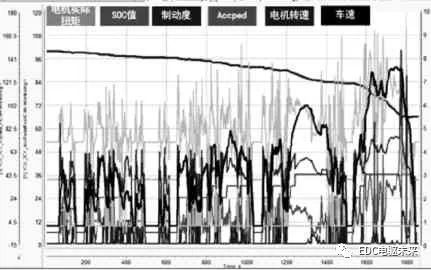
圖14 測(cè)試驗(yàn)證數(shù)據(jù)分析圖
本項(xiàng)目策略設(shè)計(jì)完成后,進(jìn)行了不同模式、不同工況條件下整機(jī)演示測(cè)試,通過對(duì)測(cè)試數(shù)據(jù)的分析(如圖14),充分驗(yàn)證策略符合性。
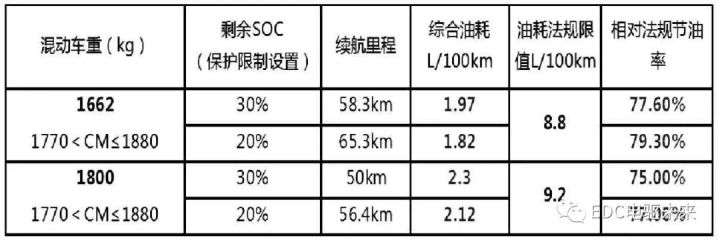
同時(shí),為驗(yàn)證策略實(shí)際節(jié)油效果,進(jìn)行法規(guī)工況油耗測(cè)試,油耗低于法規(guī)限值,策略有效。法規(guī)工況綜合油耗測(cè)試結(jié)果見表1 所示。
表1 法規(guī)工況綜合油耗測(cè)試結(jié)果(12.3KWh 電池)
3 結(jié)論
P2 構(gòu)架混合動(dòng)力控制策略開發(fā)已經(jīng)通過演示驗(yàn)證,節(jié)油效果顯著,達(dá)到預(yù)定目標(biāo),取得了開發(fā)成效。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 64



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
