




 廣告
廣告





















































優(yōu)化思想及KKT原理在換道決策中的應(yīng)用
2021-11-23 10:43:13· 來(lái)源:智能運(yùn)載裝備研究所

在車輛的實(shí)際避障過(guò)程中,決策規(guī)劃是自動(dòng)駕駛最重要的部分之一。決策規(guī)劃系統(tǒng)在融合多傳感器信息之后,在基于車輛動(dòng)力學(xué)的同時(shí)結(jié)合駕駛需求進(jìn)行車輛行為的實(shí)時(shí)決
在車輛的實(shí)際避障過(guò)程中,決策規(guī)劃是自動(dòng)駕駛最重要的部分之一。決策規(guī)劃系統(tǒng)在融合多傳感器信息之后,在基于車輛動(dòng)力學(xué)的同時(shí)結(jié)合駕駛需求進(jìn)行車輛行為的實(shí)時(shí)決策規(guī)劃,主要分為行為決策和運(yùn)動(dòng)規(guī)劃兩部分,行為決策在滿足交通規(guī)則、行駛安全性等約束條件的前提下求解最優(yōu)的駕駛行為意圖;而運(yùn)動(dòng)規(guī)劃主要是根據(jù)車輛運(yùn)動(dòng)狀態(tài)和已知的環(huán)境信息,在考慮多重復(fù)雜約束條件下,實(shí)時(shí)規(guī)劃車輛的期望運(yùn)動(dòng)軌跡,以保證車輛的安全性和舒適性。本文主要以換道決策為例,對(duì)其中的優(yōu)化問(wèn)題展開(kāi)描述,以求加深對(duì)優(yōu)化建模與KKT原理的理解。

圖1 決策規(guī)劃-分層體系結(jié)構(gòu)圖
采用橫縱向非解耦五次多項(xiàng)式方程來(lái)描述換道路徑:
其中,
即

其中,x代表縱向位移,y代表橫向位移,ai表示多項(xiàng)式擬合系數(shù),以開(kāi)始換道避障時(shí)刻建立相對(duì)坐標(biāo)系如下圖所示:

圖2 換道避障過(guò)程示意圖
圖中(x0,y0)即為原點(diǎn)(0,0),xend和yend分別表示換道完成時(shí)刻的縱橫向位移,其中在行為決策過(guò)程中,假設(shè)橫縱向位移未知,本文將設(shè)計(jì)關(guān)于行為決策層和運(yùn)動(dòng)控制的緊急轉(zhuǎn)向避障系統(tǒng)。
假設(shè)換道過(guò)程的邊界約束條件為:

其中,K表示曲率即
則邊界約束為
求解可得多項(xiàng)式系數(shù)為

則換道路徑為
考慮在緊急避障過(guò)程中,輪胎極有可能會(huì)出現(xiàn)高飽和并開(kāi)始側(cè)滑的現(xiàn)象,因此需要在緊急轉(zhuǎn)向避障過(guò)程中保證車輛的穩(wěn)定性。因此,在行為決策時(shí)必須考慮車輛動(dòng)力學(xué)約束條件,設(shè)計(jì)一個(gè)動(dòng)態(tài)風(fēng)險(xiǎn)評(píng)估模型,用來(lái)持續(xù)評(píng)估碰撞與車輛穩(wěn)定性的相關(guān)風(fēng)險(xiǎn)。
車輛質(zhì)心處的橫向加速度為:
其中,

其中,vx為縱向速度,vy為橫向速度,γ為車身橫擺角速度,β為車身側(cè)偏角。則車輛橫向加速度為

橫向加速度受輪胎與路面之間附著系數(shù)的約束,它們之間的關(guān)系為:
其中,
其中,μ是路面與輪胎之間的附著系數(shù),g是重力加速度。假設(shè)
其中,k是一個(gè)動(dòng)態(tài)系數(shù)。則
根據(jù)車輛運(yùn)動(dòng)學(xué),車輛橫擺角速度為

結(jié)合換道路徑的五次多項(xiàng)式方程,可得橫擺角速度為
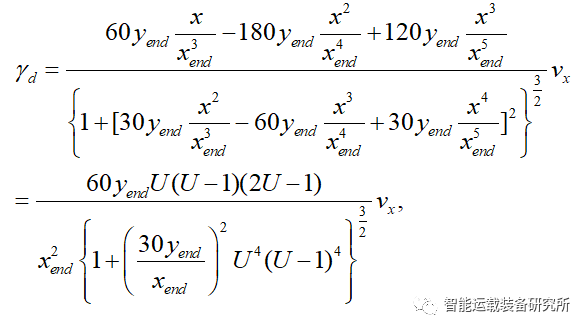
其中,
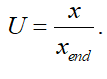
顯然0≤U≤1,車輛橫擺角速度γd與U的取值有關(guān),為了保證車輛的橫向穩(wěn)定性,其橫擺角速度不能太大,需要對(duì)最大的橫擺角速度進(jìn)行約束?,F(xiàn)在就考慮橫擺角速度γd=f(U)的最大值問(wèn)題。根據(jù)KKT原理,最大值將出現(xiàn)在極值點(diǎn)或者邊界點(diǎn)。當(dāng)U=0或者U=1時(shí),車輛橫擺角速度γd=0,因此,換道過(guò)程中最大的橫擺角速度肯定出現(xiàn)在極值點(diǎn)。對(duì)橫擺角速度γd=f(U)求導(dǎo)可得極值點(diǎn)滿足方程
令
則-1/4≤z≤0,且極值點(diǎn)方程被轉(zhuǎn)化成一元五次方程

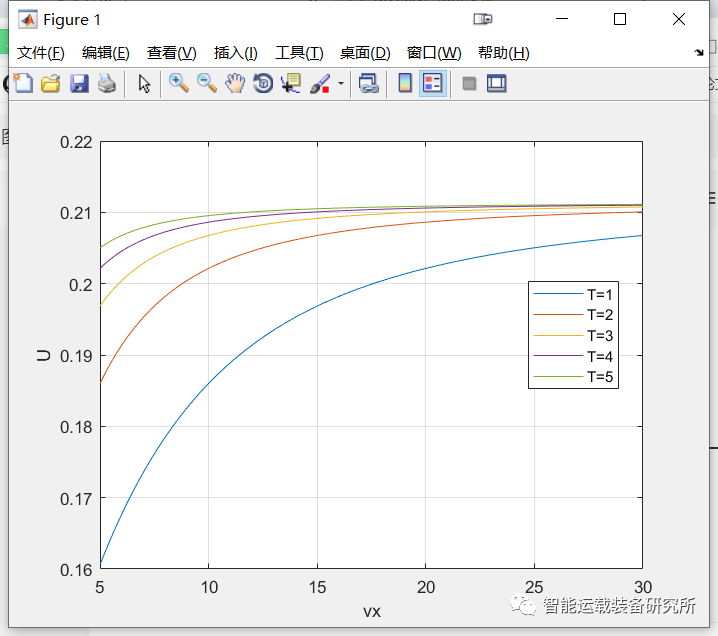
可以先求解該方程得到z后再求解極值點(diǎn)U。通過(guò)分析發(fā)現(xiàn),該方程的解與中間變量a的取值有關(guān),那我們就借助MATLAB工具仿真分析一下該極值點(diǎn)與a取值的關(guān)系,程序如下。
clear,clc
T=1:5;%換道時(shí)距
vx=linspace(5,30);%車速
U=zeros(5,10);
yend=3.5;
%%
for i=1:5
for j=1:100
xend=T(i)*vx(j)+2;
a=(30*yend/xend)^2;
z=roots([18*a 5*a 0 0 -6 -1]);
index=find(z<=0&z>=-0.25&imag(z)==0);
U(i,j)=min(roots([1 -1 -z(index)]));
end
end
figure
plot(vx,U')
grid on
xlabel('vx');ylabel('U')
legend('T=1','T=2','T=3','T=4','T=5')
%%
u=linspace(min(min(U)),max(max(U)));
fu=u.*(u-1).*(2*u-1)./(1+a*u.^4.*(u-1).^4).^1.5;
figure
plot(u,fu)
grid on
xlabel('U');ylabel('fU')
求解結(jié)果如下??梢?jiàn),當(dāng)U=0.21時(shí),車輛橫擺角速度γd最大。

圖3 仿真求解結(jié)果
當(dāng)U=0.21時(shí),最大的橫擺角速度為
其中,p=60U(U-1)(2U-1)=5.77,q=900U^4*(U-1)^4=0.68。
因此最大的橫擺角速度必須滿足車輛動(dòng)力學(xué)限制條件即:
定義風(fēng)險(xiǎn)評(píng)估函數(shù)為
在實(shí)際的車輛避障過(guò)程中,為更加有效地評(píng)估風(fēng)險(xiǎn),從而進(jìn)一步探索安全換道距離的極限位置所在,本文采用了跟隨車輛和前車的實(shí)時(shí)距離。
假設(shè)緊急避障的極限安全距離滿足如下關(guān)系式:
其中,M和N為比例系數(shù)。
如圖4所示的緊急轉(zhuǎn)向避障,其中,xfl為車載傳感器(雷達(dá)或攝像頭)探測(cè)到距離前車的縱向距離,yfl是當(dāng)行駛距離為xfl時(shí)的橫向位移。
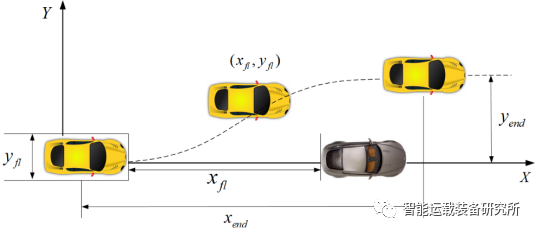
圖4 緊急轉(zhuǎn)向避障
假設(shè)(xfl,yfl)是無(wú)碰撞換道軌跡上的一個(gè)點(diǎn),根據(jù)換道軌跡的公式可得M和N之間滿足關(guān)系式
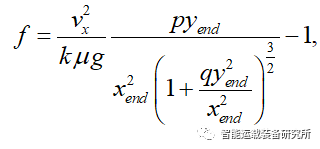
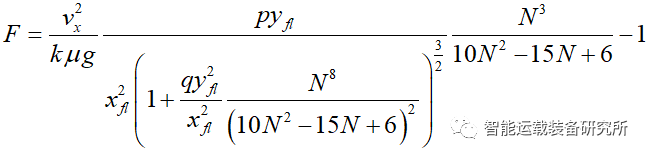
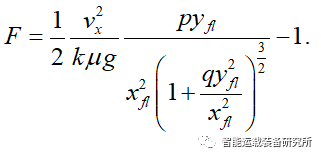
將其帶入風(fēng)險(xiǎn)評(píng)估函數(shù)中得到改進(jìn)后的風(fēng)險(xiǎn)評(píng)估函數(shù)
安全換道過(guò)程的風(fēng)險(xiǎn)評(píng)估函數(shù)需滿足F≤0,其對(duì)應(yīng)的極限安全位置恰好對(duì)應(yīng)F=0。此時(shí),本車與障礙物車輛間的縱向距離xfl是自變量N的函數(shù),即F=0相當(dāng)于隱函數(shù)F(xfl,N)=0,換道的極限安全位置是xfl取最小值時(shí),該問(wèn)題就變成了求解隱函數(shù)的極值點(diǎn)N使得縱向距離xfl最小。通過(guò)隱函數(shù)求導(dǎo)可得其極值點(diǎn)為N=2.2,取N=2,則M=2。則簡(jiǎn)化后的風(fēng)險(xiǎn)評(píng)估函數(shù)為
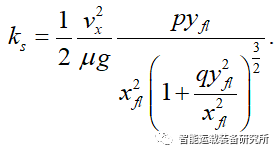
根據(jù)F=0可得動(dòng)態(tài)因子為
當(dāng)車輛緊急換道避障時(shí),假設(shè)車寬為1.7m,橫向安全閾值取0.5m,則yfl=2.2m。根據(jù)實(shí)際的縱向距離xfl和行駛速度vx實(shí)時(shí)計(jì)算動(dòng)態(tài)因子ks,當(dāng)Thmin≤ks≤Thmax時(shí)即可換道避障,否則存在碰撞或者橫向失穩(wěn)的風(fēng)險(xiǎn)。行為決策過(guò)程如下圖所示。
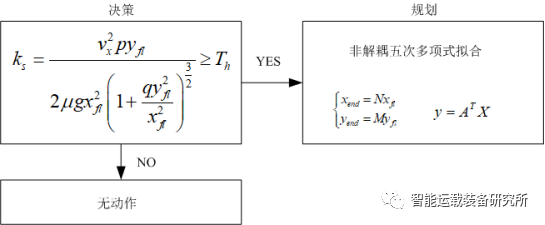
圖5 行為決策過(guò)程示意圖
參考文獻(xiàn):Emergency steering control of autonomous vehicle for
collision avoidance and stabilisation
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 62



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開(kāi)發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
