




 廣告
廣告





















































首頁(yè) > 汽車(chē)測(cè)試技術(shù) > 正文
某車(chē)型轉(zhuǎn)向系統(tǒng)模態(tài)分級(jí)對(duì)標(biāo)
2022-03-03 00:04:55· 來(lái)源:汽車(chē)NVH之家

[摘要]完成了某車(chē)型的轉(zhuǎn)向系統(tǒng)模態(tài)分析對(duì)標(biāo),包括儀表板橫梁支架(CCB,Cross Car Beam)約束模態(tài)、方向盤(pán)+轉(zhuǎn)向管柱約束模態(tài)、方向盤(pán)+轉(zhuǎn)向管柱+CCB約束模態(tài)和整
[摘要]完成了某車(chē)型的轉(zhuǎn)向系統(tǒng)模態(tài)分析對(duì)標(biāo),包括儀表板橫梁支架(CCB,Cross Car Beam)約束模態(tài)、方向盤(pán)+轉(zhuǎn)向管柱約束模態(tài)、方向盤(pán)+轉(zhuǎn)向管柱+CCB約束模態(tài)和整車(chē)轉(zhuǎn)向系統(tǒng)模態(tài)。通過(guò)子系統(tǒng)到整車(chē)的模態(tài)分級(jí)對(duì)標(biāo),最終確保整車(chē)分析模型的準(zhǔn)確度,為車(chē)型開(kāi)發(fā)提供可靠的技術(shù)參考。
關(guān)鍵詞:模態(tài)分級(jí)對(duì)標(biāo);轉(zhuǎn)向系統(tǒng)模態(tài)
方向盤(pán)作為駕駛員直接接觸的子系統(tǒng),其振動(dòng)過(guò)大易引起駕駛疲勞并惡化舒適性,對(duì)整車(chē)NVH性能和品牌形象均有不利影響。
潘威[1]等針對(duì)某A級(jí)轎車(chē)怠速開(kāi)空調(diào)工況下方向盤(pán)振動(dòng)不達(dá)標(biāo)的問(wèn)題,通過(guò)傳遞路徑分析對(duì)冷卻風(fēng)扇的減振墊進(jìn)行了優(yōu)化,從而有效控制了怠速方向盤(pán)抖動(dòng)。謝暴[2]等開(kāi)展了某汽車(chē)方向盤(pán)的模態(tài)分析與優(yōu)化,獲得了明顯改善方向盤(pán)怠速抖動(dòng)的改進(jìn)方案。葛新方[3]等某叉車(chē)方向盤(pán)怠速抖動(dòng)問(wèn)題,采用有限元方法進(jìn)行了方向盤(pán)總成的模態(tài)分析,并提出了優(yōu)化方案抑制怠速振動(dòng)。
為了盡可能減小整車(chē)NVH仿真誤差,本文以方向盤(pán)模態(tài)為例,開(kāi)展了儀表板橫梁支架(CCB,Cross Car Beam)約束模態(tài)、方向盤(pán)+轉(zhuǎn)向管柱約束模態(tài)、方向盤(pán)+轉(zhuǎn)向管柱+CCB約束模態(tài)和整車(chē)轉(zhuǎn)向系統(tǒng)模態(tài)等4級(jí)結(jié)構(gòu)的模態(tài)對(duì)標(biāo)分析,從子系統(tǒng)到整車(chē)逐級(jí)修正模型并控制模型的精度,提升整車(chē)NVH仿真結(jié)果的可靠性。
1 模態(tài)理論
模態(tài)是結(jié)構(gòu)的固有特性,與外載和初始條件無(wú)關(guān)。模態(tài)識(shí)別過(guò)程中,結(jié)構(gòu)被視為連續(xù)的彈性體,是一個(gè)多自由度的振動(dòng)系統(tǒng),其動(dòng)力學(xué)方程為

式中:[M]、[C]和[K]分別是系統(tǒng)的質(zhì)量矩陣、阻尼矩陣和剛度矩陣;分別是加速度、速度和位移響應(yīng)的列向量;[F]是外界激勵(lì)向量。由式(1)可得頻響函數(shù)為

2 轉(zhuǎn)向系統(tǒng)目標(biāo)分解定義
轉(zhuǎn)向系統(tǒng)模態(tài)的目標(biāo)分解定義是整車(chē)NVH開(kāi)發(fā)及目標(biāo)制定中一項(xiàng)重要的工作。若目標(biāo)定義不合理,則易導(dǎo)致方向盤(pán)抖動(dòng)、擺振等問(wèn)題的出現(xiàn)。
在項(xiàng)目開(kāi)發(fā)初期,根據(jù)發(fā)動(dòng)機(jī)的怠速激勵(lì)、懸架的路面激勵(lì)、冷卻風(fēng)扇的旋轉(zhuǎn)激勵(lì)等頻段,首先對(duì)整車(chē)狀態(tài)的轉(zhuǎn)向系統(tǒng)模態(tài)頻率設(shè)定一個(gè)目標(biāo)值,使其與主要的激勵(lì)源避頻。接著,為了使整車(chē)狀態(tài)的方向盤(pán)振動(dòng)性能達(dá)標(biāo),需要對(duì)上述目標(biāo)值進(jìn)行分解,分解順序按照整車(chē)狀態(tài)(d)、方向盤(pán)+轉(zhuǎn)向管柱+CCB接地狀態(tài)(c)、方向盤(pán)+轉(zhuǎn)向管柱接地狀態(tài)(b)、方向盤(pán)本體和CCB本體接地狀態(tài)(a)等進(jìn)行開(kāi)展。
在狀態(tài)d下,根據(jù)本車(chē)型的實(shí)際激勵(lì)頻段,將該狀態(tài)下的方向盤(pán)模態(tài)頻率目標(biāo)值設(shè)定為大于35 Hz;在狀態(tài)c下,一般要求方向盤(pán)的模態(tài)頻率至少為狀態(tài)b的85%;在狀態(tài)b下,一般要求模態(tài)頻率高于狀態(tài)a的35%;在狀態(tài)a下,一般要求方向盤(pán)本體接地模態(tài)大于75 Hz,并且CCB本體接地模態(tài)大于160 Hz。
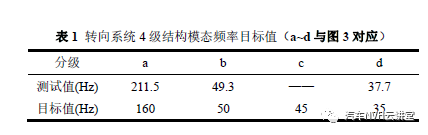
綜上,通過(guò)模態(tài)目標(biāo)分解后,得到狀態(tài)a~d的模態(tài)頻率需要分別達(dá)到方向盤(pán)本體75 Hz/CCB本體160 Hz(狀態(tài)a)、50 Hz(狀態(tài)b)、45 Hz(狀態(tài)c)和35 Hz(狀態(tài)d),并以此為各子系統(tǒng)的目標(biāo)值去實(shí)施分析和優(yōu)化。
3 轉(zhuǎn)向系統(tǒng)分級(jí)模態(tài)試驗(yàn)
3.1 CCB模態(tài)試驗(yàn)
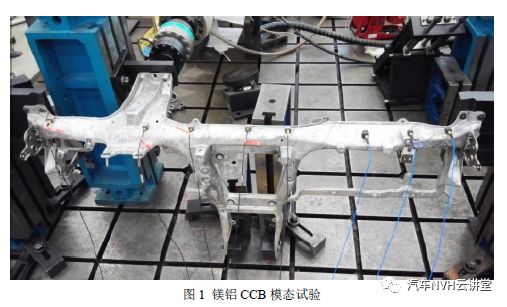
CCB是整合駕駛艙內(nèi)其他零部件為一體的零件,對(duì)于轉(zhuǎn)向系統(tǒng)模態(tài)和碰撞安全性能都有直接的影響。鋼質(zhì)CCB主要采用焊接方法將各部分進(jìn)行連接,根據(jù)設(shè)計(jì)結(jié)構(gòu)的不同其焊縫總長(zhǎng)可達(dá)800~2500 mm[4];而鎂鋁合金CCB通過(guò)采用整體鑄造工藝生產(chǎn)。鎂鋁合金的密度小、阻尼大,是應(yīng)用前景非常大的輕量化材料[5]。
各級(jí)結(jié)構(gòu)的模態(tài)頻率目標(biāo)值如表1所示。作為轉(zhuǎn)向系統(tǒng)的安裝骨架,CCB約束模態(tài)的目標(biāo)值一般要求超過(guò)160 Hz,以確保CCB的整體剛度足夠大。
本車(chē)型采用鎂鋁合金CCB,模態(tài)測(cè)試如圖1所示。在測(cè)試過(guò)程中,考慮到CCB在車(chē)身上的安裝點(diǎn)高度不一,因此對(duì)每個(gè)安裝點(diǎn)都制作了一套剛度很大的工裝,并將其因此在剛性試驗(yàn)臺(tái)上,使得各安裝點(diǎn)的邊界條件盡可能接近于固支狀態(tài)。經(jīng)測(cè)試發(fā)現(xiàn),CCB約束模態(tài)頻率的測(cè)試結(jié)果為211.5 Hz(見(jiàn)表1),遠(yuǎn)高于設(shè)計(jì)目標(biāo),說(shuō)明采用鎂鋁合金鑄造的CCB整體剛度是非常理想的。
3.2 方向盤(pán)+轉(zhuǎn)向管柱模態(tài)試驗(yàn)
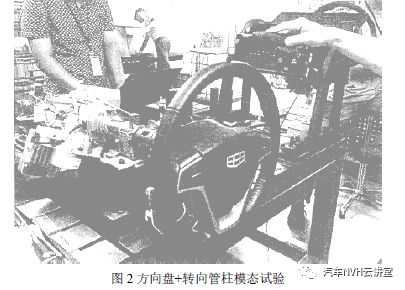
轉(zhuǎn)向管柱總成是汽車(chē)轉(zhuǎn)向系統(tǒng)的最基本組成部分之一,它是決定汽車(chē)行駛安全性與可靠性的關(guān)鍵部件,其中對(duì)轉(zhuǎn)向管柱總成的模態(tài)分析是保證和提高產(chǎn)品質(zhì)量的一個(gè)重要環(huán)節(jié)[6]。若轉(zhuǎn)向管柱的一階模態(tài)頻率過(guò)低,易使方向盤(pán)模態(tài)頻率與發(fā)動(dòng)機(jī)怠速激勵(lì)頻率重合,從而引發(fā)方向盤(pán)抖動(dòng)、擺振等NVH問(wèn)題。
在方向盤(pán)+轉(zhuǎn)向管柱模態(tài)試驗(yàn)中(如圖2所示),管柱與CCB的安裝點(diǎn)通過(guò)工裝剛性固定在試驗(yàn)臺(tái)上,測(cè)試得到方向盤(pán)一階橫擺模態(tài)頻率為49.3 Hz,一階垂擺模態(tài)頻率為55.8 Hz。
3.3 方向盤(pán)+轉(zhuǎn)向管柱+CCB模態(tài)試驗(yàn)
方向盤(pán)+轉(zhuǎn)向管柱通過(guò)螺栓與CCB連接。一般來(lái)說(shuō),在后續(xù)的對(duì)標(biāo)過(guò)程中,若確保了方向盤(pán)+轉(zhuǎn)向管柱、CCB本體的模型精度,即可基本上保證方向盤(pán)+轉(zhuǎn)向管柱+CCB模型的可靠性,因此,在實(shí)際開(kāi)發(fā)過(guò)程中,可以不開(kāi)展2.3的試驗(yàn)工作。
3.4 整車(chē)狀態(tài)模態(tài)試驗(yàn)
在試驗(yàn)車(chē)上完成了整車(chē)狀態(tài)的轉(zhuǎn)向系統(tǒng)模態(tài)頻率試驗(yàn),結(jié)果顯示,整車(chē)轉(zhuǎn)向系統(tǒng)橫擺模態(tài)頻率為37.7 Hz,垂擺模態(tài)頻率為38.6 Hz。由于一階橫擺模態(tài)頻率較低,因此下文重點(diǎn)關(guān)注該階模態(tài)的對(duì)標(biāo)。
4 轉(zhuǎn)向系統(tǒng)分級(jí)模態(tài)對(duì)標(biāo)
4.1 CCB模態(tài)對(duì)標(biāo)
影響CCB模型精度的主要因素是:
a) 對(duì)于鋼質(zhì)CCB而言,將縫焊簡(jiǎn)化為剛性單元的過(guò)程使得CCB零件之間的連接過(guò)于剛性,對(duì)于模型精度有一定影響;
b) 對(duì)于鎂鋁合金CCB而言,鑄件各區(qū)域的厚度分布不均,若不細(xì)分厚度,也將放大模型的誤差。
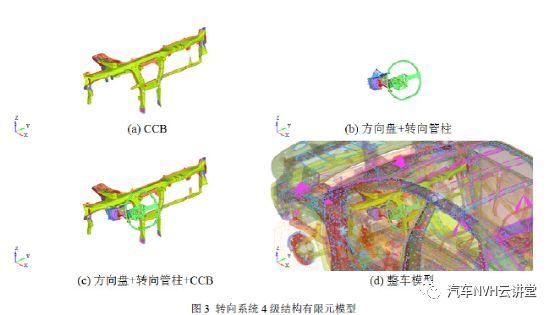
本車(chē)型采用鎂鋁合金CCB,有限元模型如圖3(a)所示,并對(duì)各區(qū)域的厚度進(jìn)行了細(xì)分,以提升模型精度。將CCB各個(gè)車(chē)身安裝點(diǎn)約束后,計(jì)算得到CCB的約束模態(tài)為216.8 Hz,與試驗(yàn)結(jié)果(211.5 Hz)的誤差為2.5%。經(jīng)分析驗(yàn)證,該誤差主要由CCB模態(tài)測(cè)試時(shí)的工裝引起??傮w而言,CCB模型的精度是可以保證的。
4.2 方向盤(pán)+轉(zhuǎn)向管柱模態(tài)對(duì)標(biāo)
轉(zhuǎn)向管柱一般分為液壓助力式(HPS)和電子助力式(EPS)。前者的結(jié)構(gòu)較為簡(jiǎn)單,建模誤差較?。缓笳叩慕Y(jié)構(gòu)較為復(fù)雜,比如電機(jī)、電控單元等部件的內(nèi)部結(jié)構(gòu)非常復(fù)雜,它們的質(zhì)量、慣量和質(zhì)心坐標(biāo)對(duì)于管柱模態(tài)影響較大,因此在建模過(guò)程中需要對(duì)這些參數(shù)進(jìn)行重點(diǎn)關(guān)注。
方向盤(pán)+EPS轉(zhuǎn)向管柱的有限元模型如圖3(b)所示。將管柱在CCB上的安裝點(diǎn)固支約束后,得到方向盤(pán)+轉(zhuǎn)向管柱的約束模態(tài)為48.5 Hz,與試驗(yàn)結(jié)果(49.3 Hz)之間的誤差為-1.6%,從而證明了方向盤(pán)+轉(zhuǎn)向管柱模型的精度。
4.3 方向盤(pán)+轉(zhuǎn)向管柱+ CCB模態(tài)對(duì)標(biāo)
方向盤(pán)+轉(zhuǎn)向管柱通過(guò)螺栓與CCB連接。由于螺栓的剛度非常大,一般可能將其簡(jiǎn)化為剛性單元連接。當(dāng)確保2.1和2.2的模型準(zhǔn)確度后,一般來(lái)說(shuō),方向盤(pán)+轉(zhuǎn)向管柱+CCB的精度是可以保證的。
如圖1(c)所示為方向盤(pán)+轉(zhuǎn)向管柱+CCB的有限元模型,將CCB在車(chē)身上的安裝點(diǎn)固支約束后,得到該子系統(tǒng)的約束模態(tài)頻率為46.5 Hz,高于目標(biāo)值45 Hz,初步達(dá)到方向盤(pán)模態(tài)的設(shè)計(jì)需求。4.4 整車(chē)狀態(tài)模態(tài)對(duì)標(biāo) 整車(chē)有限元模型一般由內(nèi)飾車(chē)身和底盤(pán)組成,其中內(nèi)飾車(chē)身包括白車(chē)身、轉(zhuǎn)向系統(tǒng)、四門(mén)兩蓋、內(nèi)外飾等,底盤(pán)包括前后懸架、動(dòng)力總成等。在整車(chē)狀態(tài)的轉(zhuǎn)向系統(tǒng)中,需要特別注意轉(zhuǎn)向中間軸的建模,因?yàn)樵撦S是允許輕微竄動(dòng)的。在建模過(guò)程中,一般將中間軸分為上下兩段,均采用一維梁?jiǎn)卧#⑼ㄟ^(guò)一組約束X和Y向自由度(圖中局部坐標(biāo))的剛性單元進(jìn)行連接,釋放Z向自由度,如圖4所示。
如圖3(d)所示為整車(chē)模型,將車(chē)輪通過(guò)接地剛度約束后,得到整車(chē)狀態(tài)的方向盤(pán)模態(tài)為38.6 Hz,與試驗(yàn)結(jié)果(37.7 Hz)之間的誤差為2.4%,在達(dá)到設(shè)計(jì)目標(biāo)值的同時(shí),也確保了整車(chē)仿真模型的可信度。

5 總結(jié)
本文完成了某車(chē)型轉(zhuǎn)向系統(tǒng)的模態(tài)分級(jí)對(duì)標(biāo),從CCB、方向盤(pán)+轉(zhuǎn)向管柱、方向盤(pán)+轉(zhuǎn)向管柱+CCB、整車(chē)狀態(tài)等4個(gè)狀態(tài),完成了各級(jí)結(jié)構(gòu)的模態(tài)對(duì)標(biāo)工作,并從建模上指出需要重點(diǎn)關(guān)注的問(wèn)題,如中間管柱的建模、EPS管柱的配重等,從細(xì)節(jié)上提升整車(chē)狀態(tài)轉(zhuǎn)向系統(tǒng)模態(tài)頻率的仿真精度,為整車(chē)虛擬NVH性能開(kāi)發(fā)提供可靠的技術(shù)參考。
作者:毛杰,朱凌,劉顯臣,彭鴻,郭志偉,黃新華
作者單位:浙江吉利汽車(chē)研究院有限公司,寧波,315336
來(lái)源:2017汽車(chē)NVH控制技術(shù)國(guó)際研討會(huì)論文集
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 67



 廣告
廣告 編輯推薦




最新資訊
-
“汽車(chē)爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開(kāi)發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車(chē)備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車(chē)前照燈配光性能的工
2026-03-03 12:07
