




 廣告
廣告





















































FAST-LIO2: 快速直接的激光雷達(dá)-慣性里程計(jì)
2021-09-12 21:53:49· 來源:同濟(jì)智能汽車研究所

k表示激光雷達(dá)掃描的索引,
j=1,... ,m} 表示在掃描結(jié)束時(shí)間時(shí),在局部激光雷達(dá)坐標(biāo)系L中第k次掃描采到的點(diǎn)。由于激光雷達(dá)測量噪聲,每個(gè)測量點(diǎn)通常都會(huì)受到由測距和波束定向噪聲組成的噪聲

的污染。去除此噪聲可得到在局部激光雷達(dá)坐標(biāo)系中的真實(shí)點(diǎn)位置


在使用相應(yīng)的激光雷達(dá)姿態(tài)
和外參
將真實(shí)點(diǎn)投影到全局坐標(biāo)系之后,這個(gè)真實(shí)點(diǎn)應(yīng)該正好位于地圖中的一個(gè)局部小平面塊上,即:

其中

是對應(yīng)平面的法向量,

是平面上的一個(gè)點(diǎn)(見圖2)。需要注意的是,

和
都包含在狀態(tài)向量xk中。因此,第 j個(gè)點(diǎn)測量值
所貢獻(xiàn)的測量值可以從(4)總結(jié)為更緊湊的形式,如下所示
這定義了狀態(tài)向量的隱式測量模型.
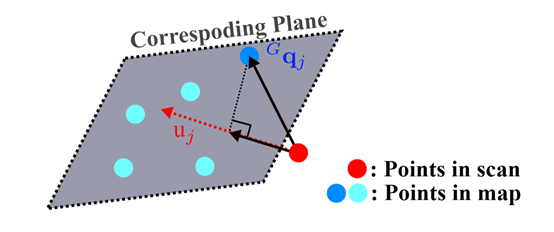
圖2 測量模型
B.迭代卡爾曼濾波
基于在流形

上制定的狀態(tài)模型(2)和測量模型(5),我們采用迭代卡爾曼濾波器,按照[55]和[22]中的過程直接在流形M上操作。它由兩個(gè)關(guān)鍵步驟組成:每此IMU測量值的傳播和每此激光雷達(dá)掃描的迭代更新,這兩個(gè)步驟都自然地估計(jì)流形上的狀態(tài),從而避免任何重整化。由于IMU測量的頻率通常高于激光雷達(dá)掃描的頻率(例如,IMU測量為200Hz,激光雷達(dá)掃描為10Hz~100Hz),因此濾波器在更新之前通常會(huì)執(zhí)行多個(gè)傳播步驟。
1)傳播:假設(shè)在融合最后一次(即第k-1次)激光雷達(dá)掃描后的最佳狀態(tài)估計(jì)是為
,協(xié)方差矩陣為

。前向傳播是在IMU測量值到達(dá)時(shí)執(zhí)行的。更具體地說,通過將過程噪聲wi設(shè)置為零,狀態(tài)和協(xié)方差按照(2)進(jìn)行傳播:

其中Qi是噪聲wi的協(xié)方差,矩陣
和

的計(jì)算如下(參見[55]中更抽象的推導(dǎo)和[22]中更具體的推導(dǎo)):

前向傳播一直持續(xù)到新的(即第k次)掃描結(jié)束,新掃描中的傳播狀態(tài)和協(xié)方差表示為
。
2)殘差計(jì)算:假設(shè)在當(dāng)前迭代更新時(shí)狀態(tài)xk的估計(jì)值(見第IV-B3節(jié))是

,根據(jù)(6)中的傳播預(yù)測出的狀態(tài),當(dāng)k=0時(shí)(即在第一次迭代前),

。然后,我們將每個(gè)測量的激光雷達(dá)點(diǎn)投影到全局坐標(biāo)系

,并在由ikd-Tree表示的地圖中搜索其最近的5個(gè)點(diǎn)(參見第V-A節(jié))。然后使用找到的最近相鄰點(diǎn)來擬合局部小平面塊,該小平面塊具有測量模型中使用的法向量
和質(zhì)心




 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
